一种新型齿形链的设计与分析*
2015-06-09 15:00:07程美
机械研究与应用 2015年5期
程 美
(湖南汽车工程职业学院机电工程系,湖南株洲 412001)
一种新型齿形链的设计与分析*
程 美
(湖南汽车工程职业学院机电工程系,湖南株洲 412001)
综合滚子链和无声链的优点,创新设计了双目齿形链,根据啮合曲面理论进行运动分析,采用TCA进行了模拟分析,得出了链片的完整啮合过程,结果反应出链条耐磨性较好、噪音降低了,应用于实际生产具有一定的价值。
齿形链;运动分析;分析模型;TCA
0 引 言
当两传动轴间的距离过远时,且需要传输较大功率时,通常采用链传动,应用广泛的是滚子链和无声链[1]。如图1所示,滚子链是由链板、活动滚子及销装配连接而成,当链条与链轮接触时,活动滚子可以转动,相互之间的啮合是滚动接触,产生滚动摩擦。所以,对啮合条件要求较低,通常适用于低速、高扭力的情况,传输速率为0~15 m/s。如图2所示,无声链是由销连接齿形链板交互组装而成,传输负荷能力较滚子链高,且产生噪音小,广泛应用于高速、高传动效率和低噪音的情况,传输速率为0~15 m/s,平均传动效率高达97% ~99%[2]。
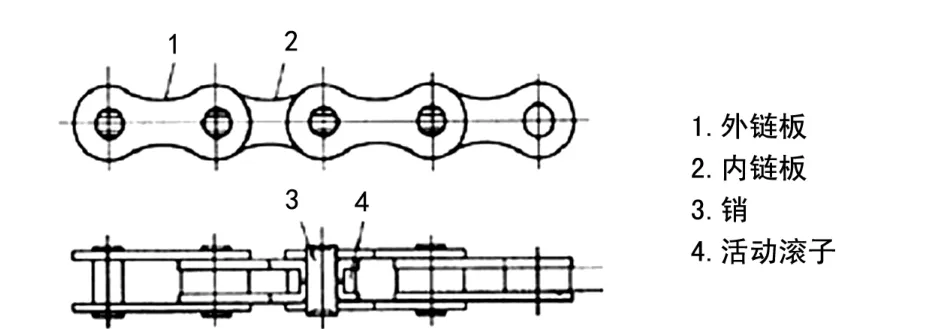
图1 滚子链
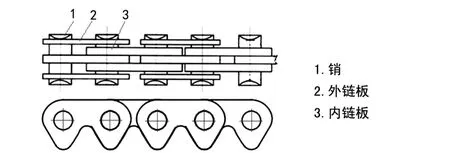
图2 无声链
从结构上看,无声链是多层链板交替重叠组成,比滚子链的磨耗大得多。而滚子链的工作噪音较大,其原因一方面是链条在链轮节圆内形成多边形效应,与链轮齿碰撞产生振动及噪音;另一方面是活动滚子冲击链轮底部造成振动与噪音。鉴于上述分析,笔者有意设计一种结合滚子链和无声链二者优点的新型双目齿形链,并进行运动分析。
1 新型双目齿形链设计
为了提高耐磨性,新型双目齿形链的主体构造如图3所示,采用了滚子链结构,将图4所示的齿形罗拉取代活动滚子,齿形罗拉是垂直固定于链板上,齿形罗拉不能自由转动。
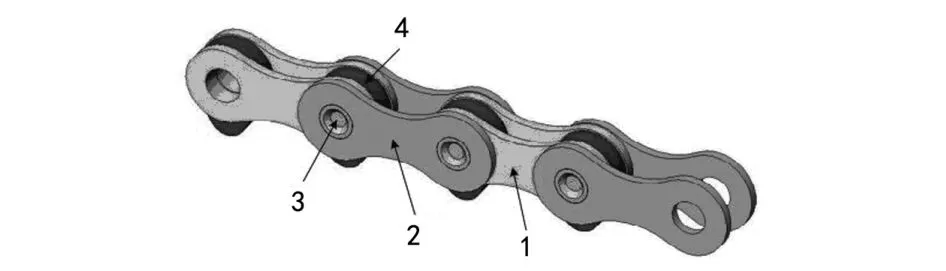
图3 滚子链
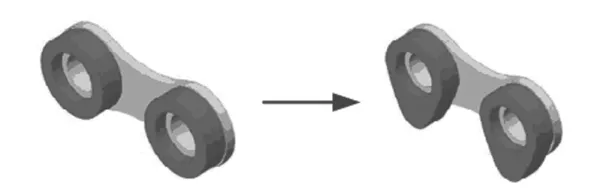
图4 齿形罗拉替代活动滚子
链条齿形罗拉如图5所示,上半部采用半圆弧,下半部参考无声链轮廓,通过齿形与链轮接触啮合。图5中,P为链片轴孔中心,Q齿形罗拉外缘圆心,p为链片节距,rb2为链片内缘半径,(a1,a2)为Q和P之间的距离。
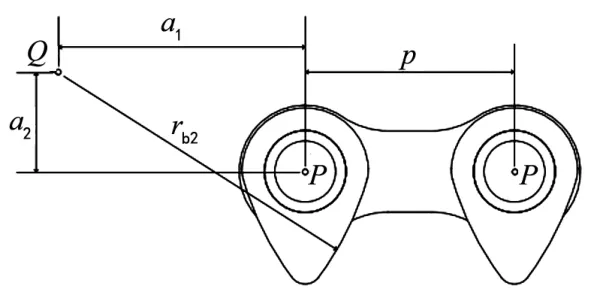
图5 齿形罗拉设计参数图
2 双目齿形链运动分析
2.1 分析模型构建
链条传动时,有紧边链条与松边链条,主要的动力传输是由主动轮带动紧边链条,再由紧边链条驱动从动轮[3]。笔者仅分析紧边链条与主动轮的最初啮合接触模式,并如图6所示对链条进行正规化,使得链条进入主动轮的角度不发生变化[4]。
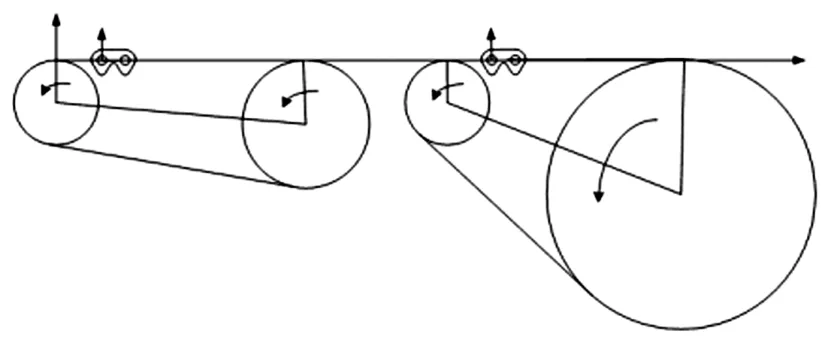
图6 链条正规化
由于文中所分析的齿形双目链是靠齿形罗拉的外缘固定在链轮上,所以当圆弧边外缘固定于渐开线链轮齿上时,在理想状态下,固定链片的轴孔中心会位于链轮圆心的辐射线上。
不同链片搭配在不同的链轮上,造成链片的真正固定位置有所不同。进行链条啮合分析前,要假定链片的固定位置,经过分析后将得到链片的真正固定位置[6]。采用图7所示的假设固定模式,即假设链片的正中央位于固定坐标系Sf轴时为固定。
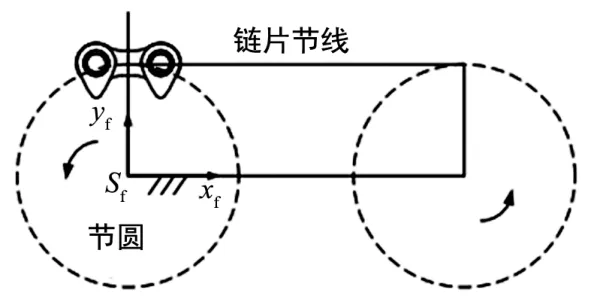
图7 链片假定固定模式
根据假设固定模式,假定图8中链片0为固定链片,则链片1做旋转运动,链片2的前齿与链轮齿接触时,将受到链片1的拉力和链轮齿的接触力,以及紧边链条所产生的紧边张力,此三力是瞬时平衡。由力学的三力平衡定理可知,三力平衡是彼此平行或共点,而由图8可以看出此三力为共点关系。
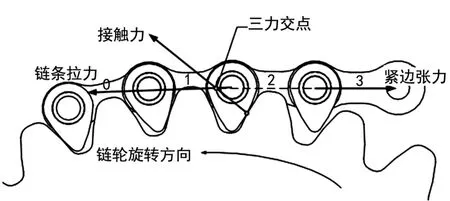
图8 链片三力平衡图
2.2 运动分析
根据分析模型,采用TCA方法进行运动分析。TCA(Tooth Contact Analysis)方法是用计算机进行齿面接触区域的分析和修正的方法,是以齿轮啮合理论为基础,以计算机为工具,建立啮合曲面的模型,仿真齿轮副的啮合过程、产生接触区域相关数据,并分析它们在不同安装形式下的齿面接触区域的情况,进而完成对非正确的接触区域的修正[6-7]。图9为左齿啮合期的TCA结果(其他时期结果图未列出),各时期的临界点数值如表1所列。

图9 左齿啮合期的TCA结果
TCA方法要求初始值的选择必须满足共轭接触定理,并将其作为迭代运算,故必须求得进行啮合接触的初始点,以此为初值进行运算。对链条节距12. 7 mm、32齿链轮[8]进行数值模拟分析,表1中φp为链条转动角度、φ1为链轮齿渐开线参数、φ2为链片1与链片2之间的夹角、φ3为链片2与链片3之间的夹角、θ2为渐开线展开角度、α2为链片2接触点与坐标系之间的x轴夹角、θ2为链轮齿3渐开线展开角度、α3为链片3接触点与坐标系之间的x轴夹角。
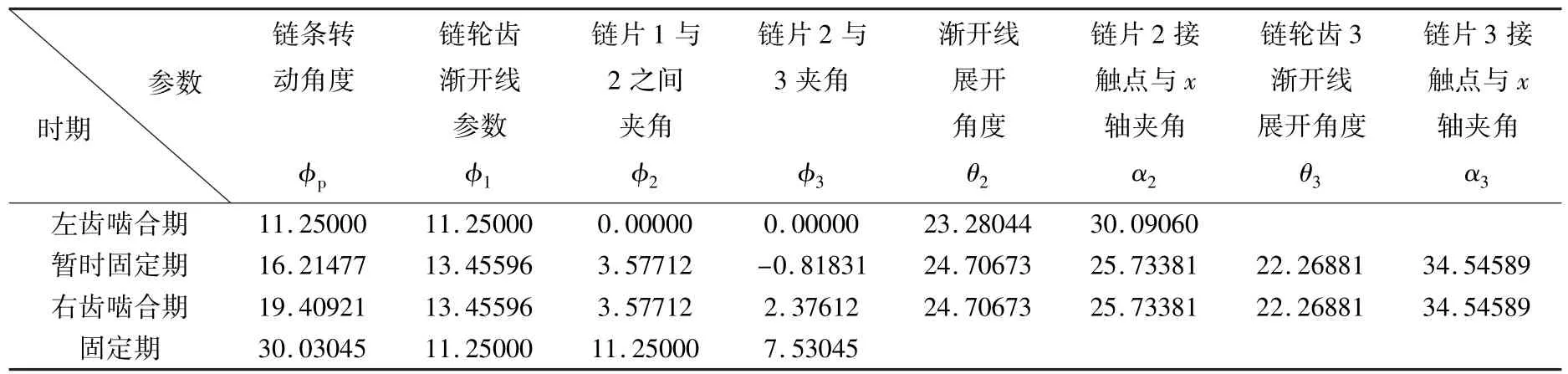
表1各时期的临界点数值
从运动分析可以看出,具有两个齿形罗拉的链片,偶数链片0、2、4的完整啮合过程,可分为紧边期、左齿啮合期、暂时固定期、右齿啮合期以及固定期。奇数链片1、3,的运动过程为紧边期、悬浮期与固定期,以链片1为例,当链片2进入啮合期时,链片1因无齿形罗拉与链轮接触,自然处于悬浮状态,链片2固定后,链片1同时固定,其完整啮合过程如表2所列。
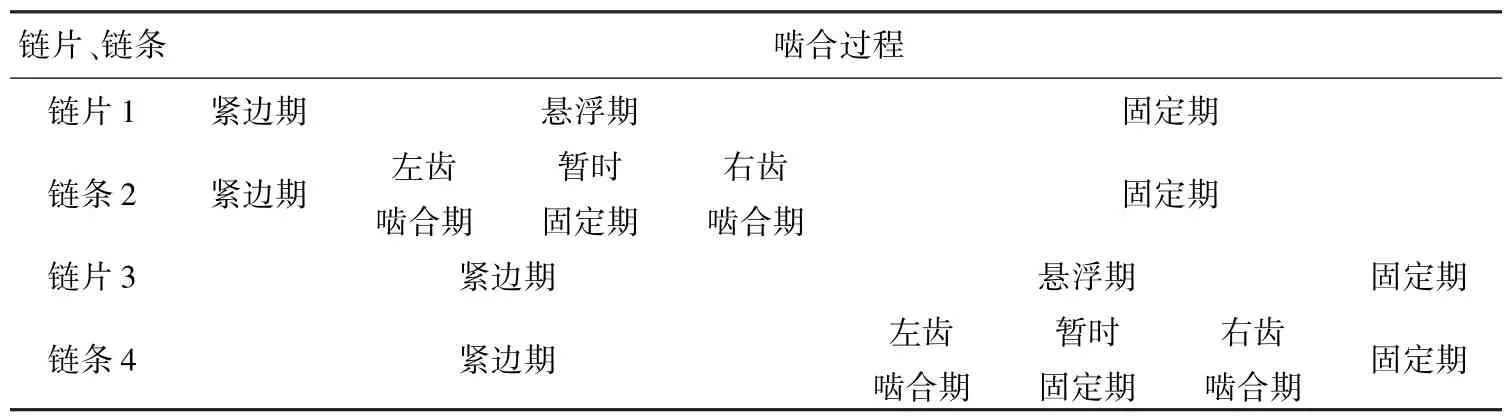
表2 啮合过程
另外,链片2在啮合过程中接触点的变化如图10所示,可以看出接触点的范围以及移动方向。由此可以分析出,齿形罗拉尺寸设计时要注意接触点,避免齿形罗拉太短或太长而导致啮合不顺利。
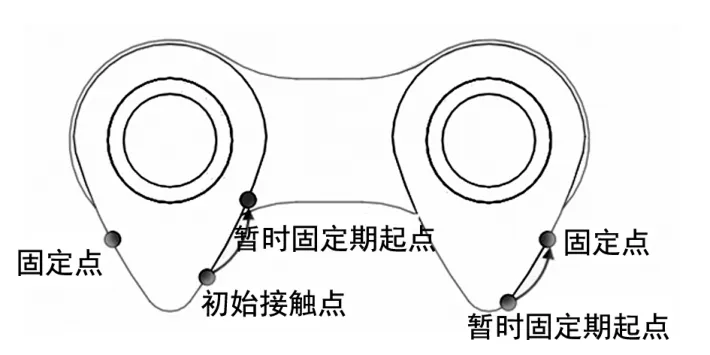
图10 接触点变化图
3 结 论
新型双目齿形链综合了滚子链和无声链的优点,一方面保留了滚子链的基本结构,提高链条耐磨性;另一方面将活动滚子改为齿形罗拉,改变了啮合时的接触方式,降低噪音。
从运动分析结果看,运动过程依次经过紧边期、左齿啮合期、暂时固定期、右齿啮合期和固定期,前后链片不具备齿形罗拉的运动过程为紧边期、悬浮期以及固定期,整个过程中每个齿形罗拉都与链轮有啮合作用,经过分析测试,该新型齿形链条具有较强的应用价值。
[1] 孟繁忠.齿形链分类及其多元变异特性研究[J].机械传动, 2014(2):5-9.
[2] 孟繁忠.齿形链啮合原理[M].北京:机械工业出版社,2008.
[3] 田 波,胡荣恒,王光建.不对称齿形链传动性能的分析[J].机械传动,2004(1):43-47,2.
[4] 许树新,孟繁忠,冯增铭,等.汽车变速箱Hy-Vo齿形链磨损特性的研究[J].摩擦学学报,2012(1):76-81.
[5] 刘功文,郝志勇,郑 康,等.汽油机正时链轮系统设计优化与动力学特性研究[J].汽车技师,2013(11):1-6.
[6] 熊 矢.用TCA方法进行精确切齿[J].现代机械,2010(4):90 -91.
[7] 孟繁忠,董成国,冯增铭,等.新型内啮合齿形链啮合迹线及多边形效应研究[J].中国机械工程,2011(8):1891-1895.
[8] 王 秀.德国齿形链与链轮工业标准分析[J].现代机械,2012 (1):17-22.
Design and Analysis of a New Kind of Silent Chain
CHENG Mei
(Mechanical and Electrical Engineering Department,Hunan Automotive Engineering Vocational College,Zhuzhou Hunan 412001,China)
According to the advantages of roller chain and the silent chain,the binocular silent chain is innovatively designed in this paper.Motion analysis is conducted according to the meshing surface theory,and simulation analysis with TCA,then the full engagement process is obtained.The results show that the chain is good in wear resistance,and with little noise,thus it would have certain value in practical production.
silent chain;motion analysis;analysis model;TCA
TH132.45
A
1007-4414(2015)05-0114-03
10.16576/j.cnki.1007-4414.2015.05.039
2015-08-09
程 美(1984-),女,湖南临澧人,讲师,在读硕士,主要从事汽车制造专业教学与研究。
猜你喜欢
奋斗(2021年19期)2021-12-07 09:07:24
小哥白尼·野生动物画报(2021年6期)2021-07-14 18:20:50
数学大王·趣味逻辑(2019年10期)2019-11-06 03:16:22
传媒评论(2017年9期)2017-12-20 08:07:58
广州文艺(2017年8期)2017-09-13 17:07:28
新高考·高一物理(2016年10期)2017-07-07 17:52:44
工会信息(2016年1期)2016-04-16 02:38:36
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
河北传媒研究(2015年6期)2015-07-12 12:05:40
噪声与振动控制(2015年4期)2015-01-01 07:07:54