米散射测风激光雷达单Fabry-Perot干涉仪鉴频系统
2015-06-09 14:21:36杨娜,杜军
黑龙江工程学院学报 2015年1期
杨 娜,杜 军
(1.黑龙江工程学院电气与信息工程学院,黑龙江哈尔滨 150050;2.哈尔滨工业大学可调谐激光技术国家级重点实验室,黑龙江哈尔滨 150080)
米散射测风激光雷达单Fabry-Perot干涉仪鉴频系统
杨 娜1,杜 军2
(1.黑龙江工程学院电气与信息工程学院,黑龙江哈尔滨 150050;2.哈尔滨工业大学可调谐激光技术国家级重点实验室,黑龙江哈尔滨 150080)
对非相干米散射多普勒测风激光雷达单Fabry-Perot干涉仪双边缘鉴频系统进行理论研究。证明通过适当地降低此系统斜入射通道信号光的发散角可以有效地弥补其边缘曲线不对称产生的测量精度降低的缺陷,使其能够接近双Fabry-Perot干涉仪双边缘鉴频系统的测量精度。还证明此系统可以根据实际风速的需要调整其测量动态范围以获得更高测量精度,具有更高的灵活性。
非相干探测;测风激光雷达;鉴频系统;双边缘技术;Fabry-Perot干涉仪
对于整个对流层以及平流层底部大范围气候学以及小范围输运混合过程的研究,风速信息被认为是最重要的参数之一。主动遥感方法,特别是多普勒激光雷达方法,已经证明可以用于获得高时空分辨率的风速测量结果[1-3]。多普勒测风激光雷达主要分为相干探测(外差探测)和非相干探测(直接探测)两类。由于非相干探测方法可以利用红外或紫外光分别对气溶胶的米散射或分子的瑞利散射信号光进行监测以获得整个大气范围的风速信息,所以受到越来越多人的关注[4-8]。边缘技术是非相干探测中的一项主要方法,其包括利用碘蒸汽滤波器的单边缘技术[2]以及利用Fabry-Perot(F-P)干涉仪的双边缘技术[9]。
中国第一台1 064nm基于F-P干涉仪双边缘技术的非相干米散射多普勒测风激光雷达已经于2005年由夏海云、孙东松等人[10]研制成功,并且对于它的一系列改进工作也于2008年完成[1]。他们的系统中使用了两个不同厚度(其厚度差约为34nm)的F-P干涉仪来构造双边缘多普勒鉴频系统。为了降低这种典型的双边缘结构的制造难度和成本,Kim等[11]人提出了一种不同的双边缘多普勒鉴频系统。其具体工作方式为:把信号光分成两束不同偏振的光分别以不同角度入射到1块固体F-P标准具。由于两束信号光的入射角度不同,那么它们的透过率曲线将会彼此分开,从而实现双边缘结构。通过实验证明,此种双边缘结构的测量精度高于单边缘结构,并且利用其对旋转硬目标进行了速度测量。本文为了相互区别,称夏海云、孙东松等人的系统为双F-P干涉仪双边缘鉴频系统(DFDE),Kim等人的系统为单F-P干涉仪双边缘鉴频系统(SFDE)。
本文对这种单F-P干涉仪双边缘结构在直接探测米散射多普勒测风激光雷达中的应用进行进一步的理论研究,给出新的与之相适应的光束发散角对F-P干涉仪透过率的影响公式。提出一种新的改进方法来弥补这种结构由于边缘曲线不对称而产生测量精度下降的缺陷,并证明这种结构可以根据实际风速来调整测量动态范围,以提高测量精度。
1 理论基础
在多普勒鉴频系统中F-P干涉仪通常由具有一定视场角θM(半角)的准直信号光照射,假设光强在此角度范围内均匀分布,F-P干涉仪的透过率曲线可以表示为
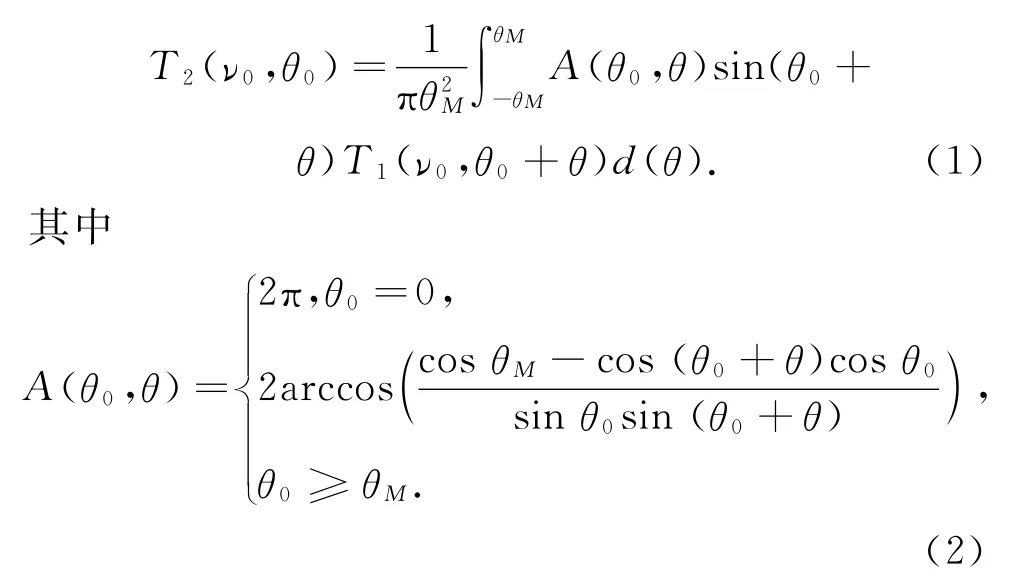
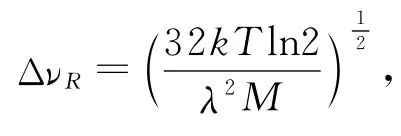
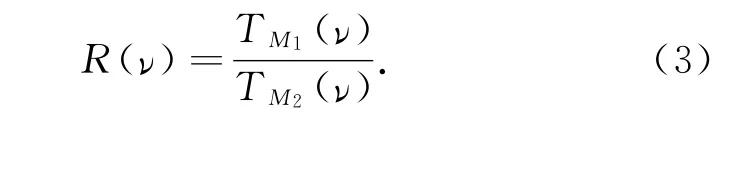
在双边缘结构中,两个测量通道透过率比值通常被用作鉴频标准来获取激光视线风速引起的多普勒频移,其可以表示为[1]其中,TM1(ν)和TM2(ν)分别表示两个通道激光或米散射信号光的透过率表达式。另外,出射激光视线风速测量误差可表示为[5]
2 单F-P干涉仪双边缘结构的改进方法
假设,在双F-P干涉仪双边缘鉴频系统中,两个F-P干涉仪厚度分别为d1=4.3mm、d2=d1-34nm;F-P干涉仪表面缺陷、反射率以及散射吸收损耗分别为dD=633nm/100、R=86.6、A=0.002 5;激光波长、线宽以及信号光发散角分别为λL=1 064nm、νL=90MHz、θM=0.5mrad;大气温度T=273K;大气散射信号光被分成两个通道,分别垂直入射这两个F-P干涉仪,利用方程(1)可以计算出这两个通道1和2的大气米和瑞利后向散射光的透过率曲线,如图1所示。
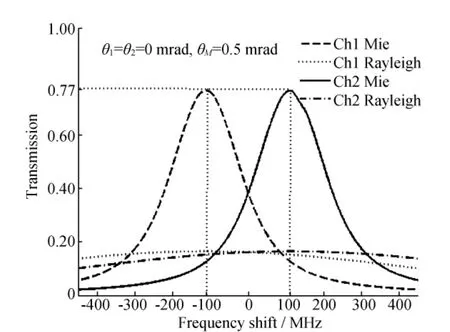
图1 双F-P干涉仪双边缘结构米和瑞利散射信号光透过率曲线
单F-P干涉仪双边缘结构两个通道的米散射光透过率曲线也被计算出来,并在图2中用虚线以及实线(发散角θM2=0.5mrad)表示出来,除了2通道信号光的入射角度不同(θ2=1.31mrad)以及使用单F-P干涉仪(d=4.3mm),其他参数与双FP干涉仪双边缘鉴频系统参数都相同。通过观察图2可以发现,2通道(斜入射光)的透过率峰值要低于1通道(垂直入射光)的峰值,这与Kim的实验结果相一致[11]。其原因在于斜入射光的空间分布不均匀,才造成其透过率峰值下降。那么这种边缘曲线不对称必定会影响这种单F-P干涉仪双边缘结构的测量精度,应该得到改进。解决方法是通过降低斜入射信号光的空间发散角来提高其峰值透过率,从而降低这种不对称性。如图2所示,使2通道信号光的发散角分别降低为0.3mrad和0.15 mrad,相应的透过率曲线用不同实线表示出来,通过比较可以发现其透过率峰值随其发散角的降低而明显升高。按照这种趋势,如果对发散角没有限制的话,单F-P干涉仪双边缘结构的透过率曲线将会非常接近双F-P干涉仪双边缘的对称结构。
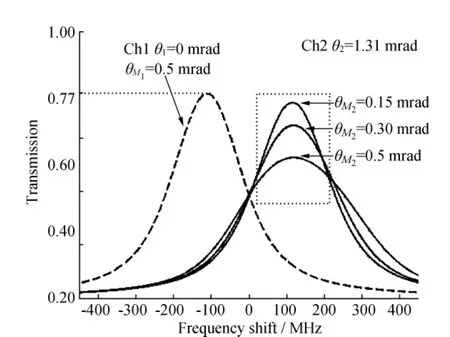
图2 单F-P干涉仪双边缘结构米散射信号光透过率曲线
鉴于以上结果,对Kim给出的单F-P干涉仪双边缘鉴频系统的结构应该进行一些改进,如图3所示。激光或大气后向散射信号光由多模光纤1导入系统,先经过凸透镜2进行准直,然后再经偏振分光棱镜3分为不同偏振的两束光作为双边缘结构的1(透射)和2(反射)两个探测通道,再分别利用分束镜5和8分出部分光,由光电探测器7和10对这两个偏振通道的光进行能量检测。接下来2通道的信号光再经扩束镜11进行进一步的扩束以降低其发散角。然后再利用反射镜12和偏振分光棱镜13对这两个通道的信号光进行和束并通过单厚度空气隙F-P干涉仪。经过F-P干涉仪的两个偏振信号光再由偏振分光棱镜15将其分开并分别用电倍增管17和19进行边缘探测。
通过调整反射镜4和12可以改变两个通道信号光的入射角度,使1和2通道信号光分别垂直和斜入射F-P干涉仪。用每个通道边缘检测信号和能量检测信号的比值作为每个通道的归一化透过率信号。由于降低斜入射信号光发散角是通过对其扩束来实现的,所以在实际系统设计时应适当增加F-P干涉仪的直径以满足斜入射通道光束孔径的要求。另外,虽然Kim提出利用激光频率调节与固体F-P标准具结合可以实现出射激光频率锁定在双边缘曲线的交点上,但是在这里还是建议使用广泛应用的空气隙厚度可调的F-P干涉仪进行激光频率的锁定[10]。
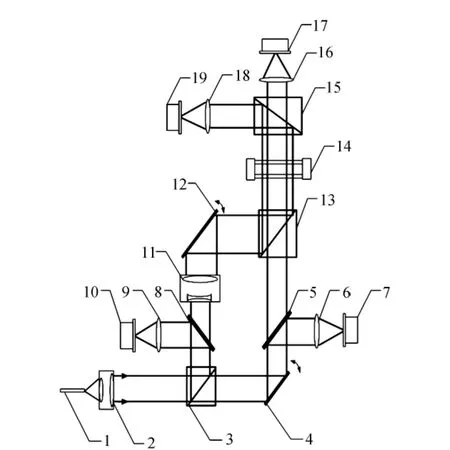
图3 单F-P干涉仪双边缘鉴频系统结构
多普勒测风激光雷达的鉴频曲线、测量灵敏度、信噪比以及不确定度都是非常重要的参数。这两种不同双边缘结构的参数已经计算出来并在图4中给出。通过观察可以发现,随着斜入射通道(2通道)发散角的降低,单F-P干涉仪双边缘结构(SFDE)的这些重要参数都逐渐接近双F-P干涉仪双边缘结构(DFDE)的参数。这说明提出的降低斜入射通道光束的发散角的办法可以降低此边缘结构非对称性产生的影响
多普勒测风激光的测量不确定度与回波光子数N0、米和瑞利散射比Ra以及大气温度T都有关系。对于不同大气条件下,这两种双边缘结构的测量不确定度在图5中给出并进行比较。图5(a)、图5(b)为不同回波光子数时,双与单F-P干涉仪双边缘结构的测量不确定度。图5(c)、图5(d)为不同米和瑞利散射比时,双与单F-P干涉仪双边缘结构的测量不确定度。其中假设单F-P干涉仪双边缘结构的斜入射通道光束发散角为0.3mrad。通过比较发现,经过改进后这两种结构在不同大气条件下可以具有近似相同的测量精度。
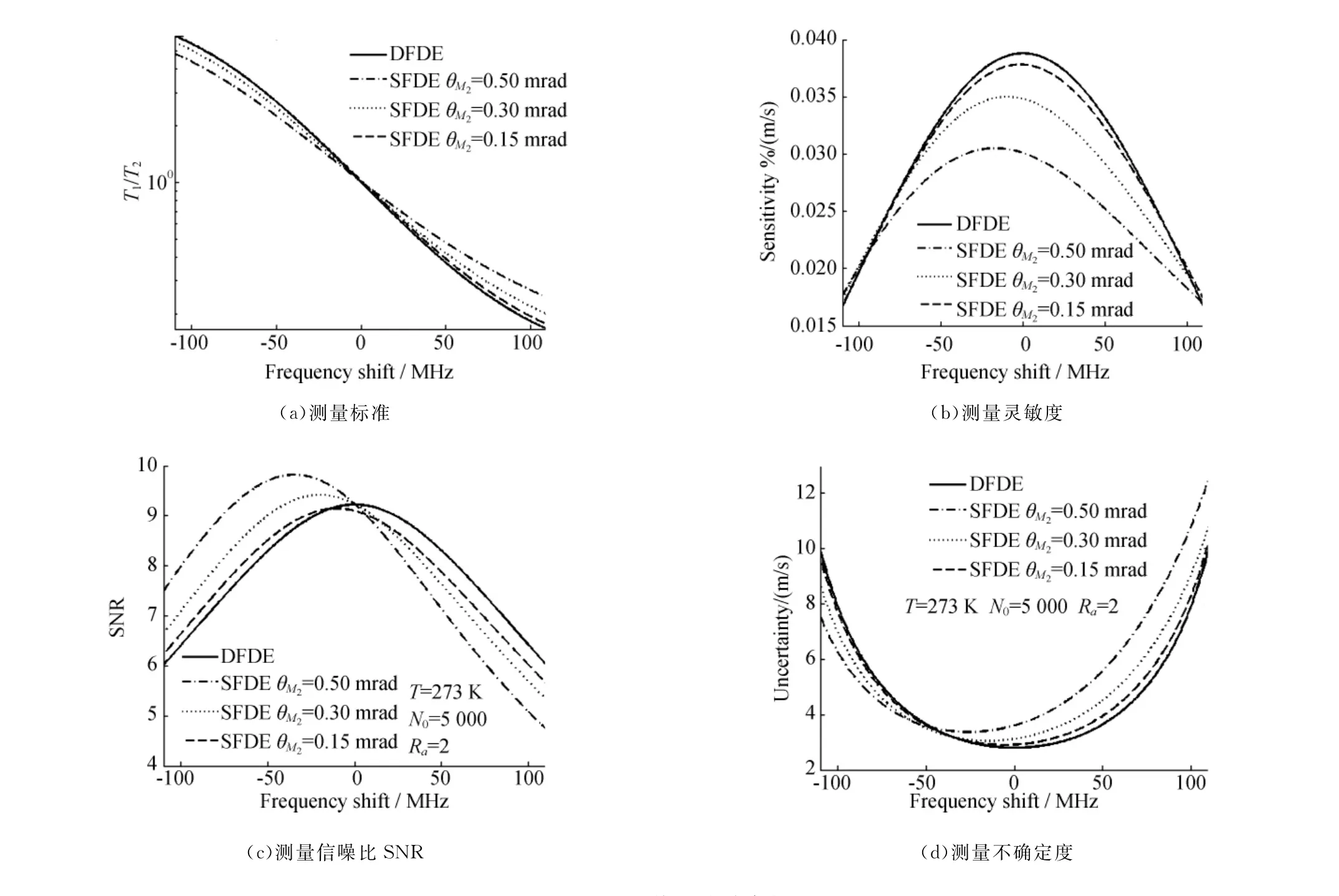
图4 双边缘结构的参数
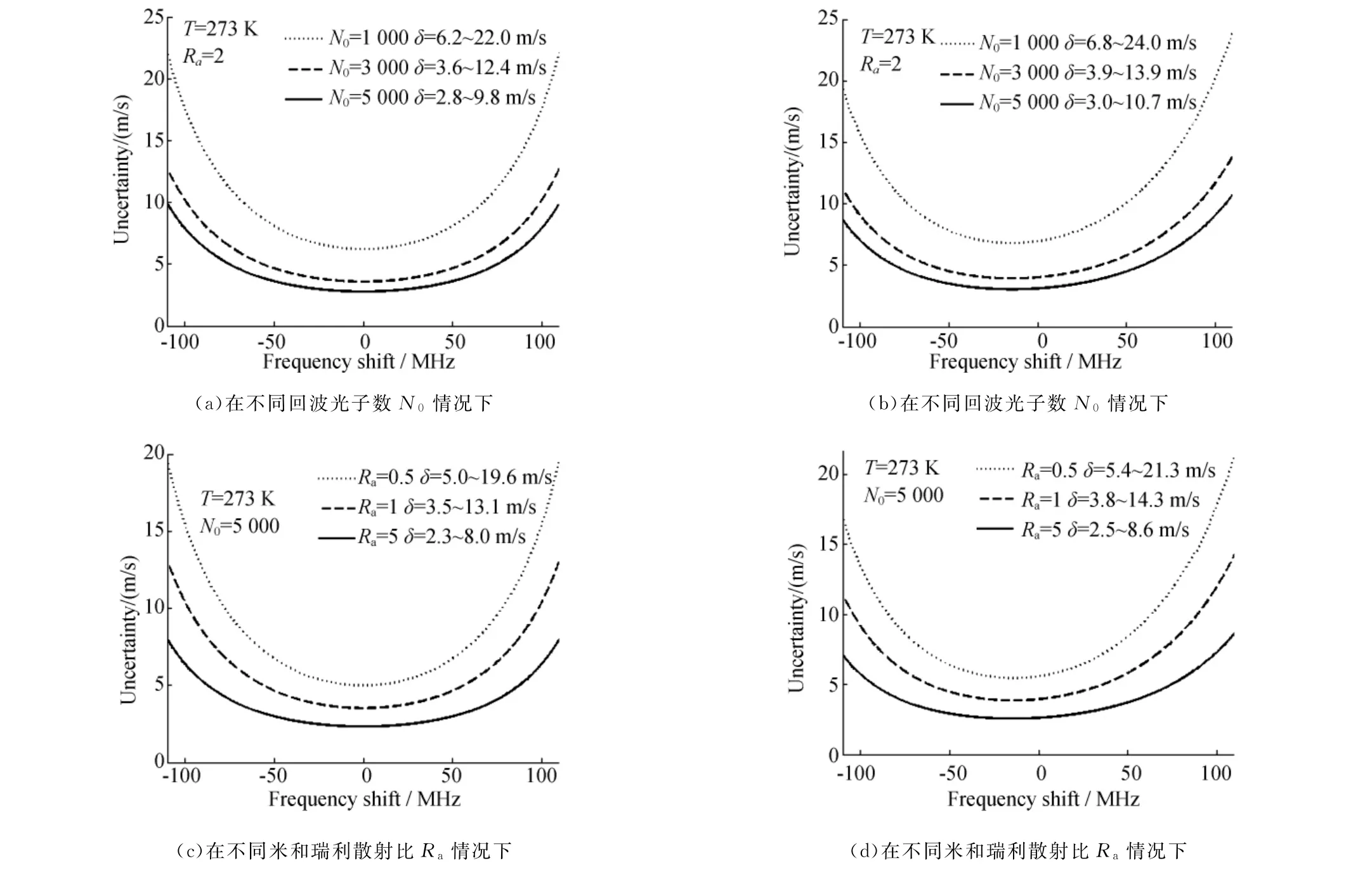
图5 不同双边缘结构的测量不确定度
3 测量动态范围和精度调节方法分析
此类多普勒测风激光雷达测量精度与测量动态范围具有大概反比例的关系,即当F-P干涉仪的半高全宽以及透过率峰值之间的间隔降低时,双边缘结构的测量动态范围就会随之降低;同时测量灵敏度就会升高,从而使精度得到提升(见式(4))。在之前的结构设计中,为了满足可能出现的最大风速,把测量动态范围设计的足够宽,这样就会以牺牲一定的测量精度为代价,然而,并不是每次测量时都会有大风速出现,这样就相当于一种测量精度的损失。对于这种矛盾,最好的解决办法就是根据实际风速的需要尽可能选择小的动态范围以获得尽可能高的测量精度。相比较而言,单F-P干涉仪双边缘结构更容易实现这种设想。
如图6(a)所示,通过对1通道光束扩束使其具有与2通道相同的发散角,这样1通道透过率曲线的半高全宽就会降低,同时其峰值透过率就会随之升高,由于单F-P干涉仪2通道光束孔径大于1通道的光束孔径(见图2),所以在空间上可以实现1通道的扩束以降低其发散角。通过调节图2中全反镜12的角度很容易使2通道的倾斜角度降低,这样2通道透过率曲线的半高全宽也会降低,同时其峰值透过率也会随之升高,并且两个通道的透过率峰值间隔就会缩小。通过以上的调整方式,同一单FP干涉仪双边缘结构可以很容易地实现测量动态范围的降低。在图6(a)中,调整斜入射通道2的入射角度,图6(b)为此调整过程对应的测量不确定度与动态范围的变化过程。通过观察可以发现,随着2通道倾斜角的降低,测量动态范围在降低,测量不确定度先减小后增大,在θ2=1.09mrad时达到最低。对于此单F-P干涉仪双边缘结构调整前后测量不确定度和范围的对比在图7中给出,通过观察很容易发现随着测量范围的降低测量精度明显升高。这就意味着当实际风速比较小时,可以调整1通道的发散角以及2通道倾斜角度,来降低测量动态范围,以获得更高的测量精度。
4 结 论
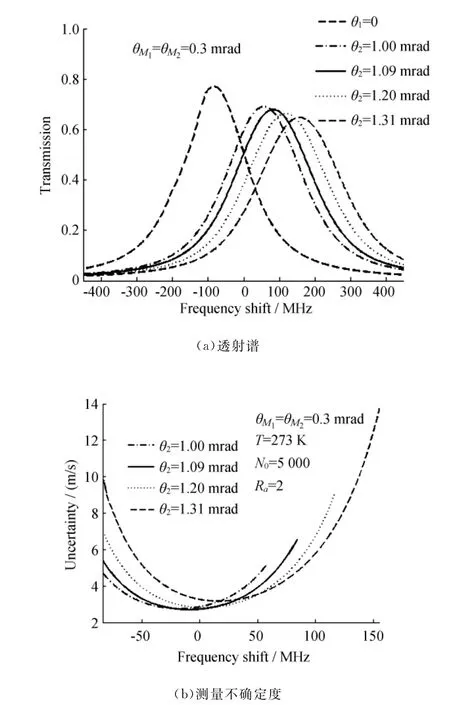
图6 2通道不同入射角情况下单F-P双边缘结构特性
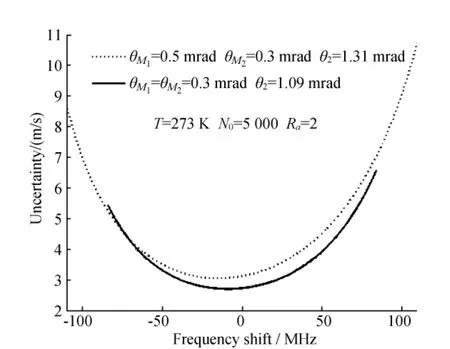
图7 测量精度与范围比较
本文对非相干米多普勒测风激光雷达的单F-P干涉仪双边缘鉴频系统进行了理论研究。此系统是通过使两束不同偏振的信号光以不同的角度入射同一厚度的F-P干涉仪来实现双边缘结构。在加工难度和成本方面较之前的双边缘结构有很大的降低,同时在使用过程中具有更多的灵活性。但是,由于斜入射通道光束空间分布不均匀,使得此种结构两个边缘曲线分布不对称,造成测量精度降低的缺陷。本文通过对斜入射通道的光束进行扩束降低发散角的方法可以使其透过率峰值升高,来弥补这种结构边缘曲线不对称的缺陷。在只考虑散粒噪声情况下,对两种不同边缘结构在不同大气条件下测量不确定度的比较可以发现,通过这种改进单F-P干涉仪双边缘系统可以具有与双F-P干涉仪双边缘系统大概相同的测量精度。另外,本文还证明利用这种双边缘结构先天的灵活性可以根据实际风速的需要尽可能调整降低测量动态范围,以获得高的测量精度。
[1]XIA H,SUN D,et al.Fabry-Perot interferometer based Mie Doppler lidar for low tropospheric wind observation[J].Applied Optics,2007,46(29):7120-7131.
[2]LIU Z S,LIU B Y,WU S H,et al.High spatial and temporal resolution mobile incoherent Doppler lidar for sea surface wind measurements[J].Optics Letters,2008,33(13):1485-1487.
[3]FOSTER M J,BOND R,STOREY J,et al.Fabry-Perot optical filter assembly:a candidate for the Mie/Rayleigh separator in EarthCARE[J].Optics Express,2009,17(5):3476-3489.
[4]SOUPRAYEN C,GARNIER A,HERTZOG A.Rayleigh-Mie Doppler wind lidar for atmospheric measurements.Ⅱ.Mie scattering effect,theory,and calibration[J].Applied Optics,1999,38(12):2422-2431.
[5]KORB C L,GENTRY B M,LI S X,et al.Theory of the double-edge technique for Doppler lidar wind measurement[J].Applied Optics,1998,37(15):3097-3104.
[6]FLESIA C,KORB C L.Theory of the double-edge molecular technique for Doppler Lidar wind measurement[J].Applied Optics,1999,38(3):432-440.
[7]MCGILL M J,SKINNER W R,IRGANG T D.Analysis techniques for the recovery of winds and backscatter coefficients from a multiple-channel incoherent Doppler Lidar[J].Applied Optics,1997,36(6):1253-1268.
[8]BELMONTE A,LÁZARO A.Measurement uncertainty analysis in incoherent Doppler lidars by a new scattering approach[J].Optics Express,2006,14(17):7699-7708.
[9]GENTRY B M,CHEN H L,LI S X.Wind measurement with 355-nm molecular Doppler Lidar[J].Optics Letters,2000,25(19):1231-1233.
[10]SUN D,ZHONG Z,ZHOU J,et al.Accuracy analysis of the Fabry-Perot etalon based Doppler Wind Lidar[J],Optical Review,2005,12(5):409-414.
[11]KIM D,KWON S,CHA H,et al.A newly designed single etalon double edge doppler wind lidar receiving optical system[J].Review of Scientific Instrument,2008,79(12):123111(1-4).
[责任编辑:刘文霞]
The single Fabry-Perot interferometer frequency analyzer for Mie wind Lidar
YANG Na1,DU Jun2
(1.College of Electrical and Information Engineering,Heilongjiang Institute of Technology,Harbin 150050,China;2.National Key Laboratory of Science and Technology on Tunable Laser,Harbin Institute of Technology,Harbin 150080,China)
The single Fabry-Perot interferometer(FPI)double-edge structure in incoherent Mie Doppler wind Lidar is investigated theoretically.It has proved that,by reducing the divergence of nonzero angle beam of this structure appropriately,the deficiency caused by the asymmetric edge curves can be made up effectively and can have approximate equal measurement accuracy with the double FPIs double-edge structure.It also has proved that the Lidar system with this structure can tune the measuring dynamic range for wind velocity requirement to reach as high measurement accuracy as possible and has a strong adaptability.
non-coherent detection;wind Lidar;frequency discriminator;double-edge technique;Fabry-Perot Interferometer
O43
A
1671-4679(2015)01-0036-06
2014-05-19
杨 娜(1980-),女,讲师,研究方向:光学.
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:34:06
汽车观察(2021年8期)2021-09-01 10:12:41
计测技术(2020年6期)2020-06-09 03:27:14
航天电子对抗(2019年4期)2019-06-02 08:22:40
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
东坡赤壁诗词(2018年1期)2018-03-31 09:10:10
制导与引信(2017年3期)2017-11-02 05:16:58
北京航空航天大学学报(2016年12期)2016-02-27 06:32:42