密闭狭小环境中多径信号对码环的影响
2015-06-08 09:58:46刘路,刘峰,李峰
电子设计工程 2015年16期
刘 路, 刘 峰, 李 峰
(北京自动化控制设备研究所 北京 100074)
多径描述的是一个信号通过两条或者更多条路径到达接收天线的现象。一般最先到达的是直视信号,随后到达的信号通常是由接收天线附近物体反射来的。这些反射信号强度比直视信号弱,载波相位不同,而且码相位会有延时。
在卫星导航定位系统中,多径对精度的影响可以达到几十米[1],而且多径对码环的影响远大于对载波环的影响。所以目前对多径信号影响的研究主要都集中在码环上,基于相干超前减滞后码环的码跟踪误差包络和平均多径误差是目前导航信号抗多径能力的公认评判标准[2]。一般码跟踪误差都是通过建立直视信号和单一反射信号的数学模型,经过计算得到[3-4]。这里单一反射信号相对于直视信号的幅度普遍取为0.5,虽然这样得到了一个简单的码跟踪误差模型,但是在实际中多径信号是由直视信号和多路不同延时、幅度反射信号叠加而成,它们对码环造成的影响还需要进一步分析。
在某型号接收机温循试验时,发现如果不采取任何抗多径干扰措施,会导致定位精度偏低甚至不定位的情况,于是文中以试验中使用的温箱为例,通过建立温箱环境下多径信号的数学模型,分析密闭狭小环境中多径信号对码跟踪环路的影响,并提出了在该环境中减小多径信号对码跟踪环路影响的方法。
1 温箱环境下北斗多径信号数学模型
试验中使用的温箱可视为内部尺寸为80 cm×70 cm×90 cm的长方体容器,转发天线和接收天线分别置于顶部和底部的中心位置,如图1所示。
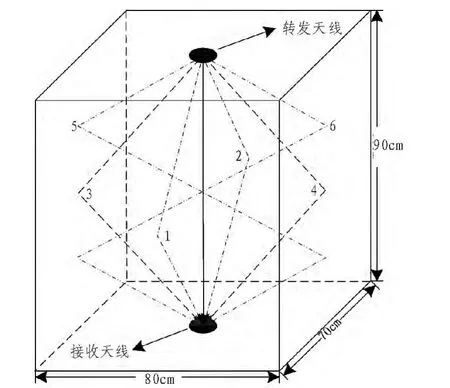
图1 温箱环境示意图Fig.1 Incubator environment
接收天线接收到的直视信号和反射信号组成的复合信号可以表示为:

其中,A代表直视信号幅值,d(t)代表数据比特电平值,c(t)代表 CB3I码,ω0代表载波频率,θ代表载波相位,ai、τi分别代表反射信号相对于直视信号的幅值和延时。
为了方便分析,下面讨论仅包含图1所示的几个信号的情况。其中,信号经前、后面中心点反射得到1、2号反射信号,经左、右面中心点反射得到3、4号反射信号,经左、右面横向中心,纵向处反射得到5、6号反射信号。
假设接收数据始终为1,转发天线和接收天线均为全向天线,具有单位增益,并忽略信号在反射时产生的损耗,此时反射信号的功率大于实际功率,对跟踪环路的影响更大。
根据无线电波在自由空间传播损耗公式:

其中f代表载波频率,单位为MHz。r代表发射点到接收点的距离,单位为km。
可以得到式(1)中 ai的值:

其中d0为转发天线到接收天线的直线距离,di为第i条反射信号由转发天线到接收天线的波程。
同时根据各反射信号与直视信号到达接收天线的波程差可计算出式(1)中 τi的值:

将计算出的参数代入式(1)可以得到接收信号的表达式:

其中 ω0=2π×1 268.52×106rad/s。
比较式(3)和式(4)可以发现,在温箱环境中,如果反射信号的延时增加,即反射信号与直视信号的波程差增加,那么它的强度会下降得很快。如反射信号相对直视信号有0.5码片的延时,此时它的幅度仅为直视信号的,这是由接受天线与转发天线距离较近导致的。于是在温箱环境中,延时较大的反射信号都可以忽略不计。
2 温箱环境下多径信号对北斗接收机码环的影响
当本地产生的复制载波信号与接收到的直视载波信号同步时,通过计算码环鉴相器输出为0时的实际码片偏差,即鉴相误差,可得出北斗多径信号对码环的影响。
2.1 码环鉴相器
归一化非相干超前减滞后幅值法的鉴相公式为:

其中D为鉴相结果,d为相关器间距,E、L分别为超前、滞后支路自相关幅值。
当接收信号仅包含直视信号,取相关器间距d=0.5,得到超前、即时、滞后3个支路的归一化自相关函数如图2所示。

图2 归一化自相关函数Fig.2 Normalized auto-correlation function
当鉴相结果为0时,E-L=0,此时本地复制的即时CB3I码与接收CB3I码之间的延时也为0,即鉴相结果正确无误差。
2.2 温箱环境下多径信号对北斗接收机码环的影响
当北斗多径信号存在时,假设接收数据始终为1,则如式(1)表示的复合信号与本地复制信号的相关运算结果经过相干积分后可以表示为:

其中,R(τ)代表本地复制CB3I码与接收到的直视信号CB3I码之间的自相关函数,ai、τi和φi代表反射信号相对于直视信号的幅值、延时和相位。
将式(5)中的参数代入到式(7)中,可以得到温箱环境下接收到的复合信号与本地复制信号之间的自相关函数:

因为CB3I码速率为10.23 Mcps,于是有:

可以得到以码片表示延时的自相关函数表达式:

取相关器间距d=0.5,得到超前、即时、之后3个支路自相关函数如图3所示。

图3 自相关函数Fig.3 Auto-correlation function
可以看出,在多径信号的影响下,自相关函数不再是左右对称的三角形,此时若令E=L,可得对应的延时即码跟踪误差τ=0.023 9(码片),约 0.7 m。
根据热噪声导致码相位测量误差估计式[5]:

可以得到载噪比45 dB、码环带宽2 Hz、相关器间距0.5、相干积分时间1 ms时,码跟踪误差为0.005码片。可见温箱环境中多径信号将取代热噪声成为码跟踪环路最大的误差来源,接收机定位精度会受到它的影响。
3 解决措施
为了减小密闭狭小环境中多径信号对码环的影响,可以考虑在四壁放置某种吸波材料减小反射信号强度。
如在上面提到的温箱环境中,选用反射损耗量为-10 dB的吸波材料,经过计算,复合信号与本地复制信号的自相关函数可以表示为:

令E=L可以得对应的码跟踪误差τ=0.002 4(码片),约0.07 m,仅为未采取措施前的码跟踪误差的,减小了多径信号对码环的影响[6]。采用这种方法以后,试验过程中的定位精度有了显著的提高。
4 结 论
文中建立了温箱环境下北斗卫星信号的数学模型并选取直视信号和6路反射信号组成复合信号进行分析,说明在密闭狭小环境中多径信号的影响下,北斗接收机码环中信号自相关函数不再是左右对称的三角形,导致码环跟踪误差的产生,影响了接收机的定位精度。可以通过在四壁布置吸波材料来减小反射信号强度,从而减小多径信号对码环的影响。
[1]PARKINSON B W,SPILKER J J,et al.Global Positioning System:Theory and Applications[M].Washington DC,USA,1996:547-68,717-55.
[2]唐祖平,胡修林,黄旭方.卫星导航信号设计中的抗多径性能分析[J].华中科技大学学报:自然科学版,2009,37(5):1-4.TANG Zu-ping,HU Xiu-lin,HUANG Xu-fang.Analysis of multipath rejection ferformance in GNSS signal design[J].Huazhong Univ.of Sci.&Tech.:Natural Science Edition,2009,37(5):1-4.
[3]潘舒,华宇.多径效应对接收机环路影响的仿真研究[J].时间频率学报,2008,31(1):56-63.PAN Shu,HUA Yu.A simulation of the multipath effects on receiver loops[J].Journal of Time and Frequency,2008,31(1):56-63.
[4]吴兴存,任宇飞,程乃平.GPS接收机中多路径干扰的研究[J].现代防御技术,2008,36(4):123-127.WU Xing-cun,REN Yu-fei,CHENG Nai-ping.Study on multipath interference in GPS receiver[J].Modern Defence Technology,2008,36(4):123-127.
[5]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2011.
[6]徐峰,张少博,陈海峰.发动机热试车数据测量误差分析及处理方法[J].火箭推进,2012(4):72-75.XU Feng,ZHANG Shao-bo,CHEN Hai-feng.Error analysis and processing of engine hot test data[J].Journal of Rocket Propulsion,2012(4):72-75.
猜你喜欢
航空维修与工程(2021年4期)2021-08-31 02:24:18
自动化仪表(2020年10期)2020-11-13 03:31:00
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
中国人民公安大学学报(自然科学版)(2018年2期)2018-10-15 08:08:36
中国人民公安大学学报(自然科学版)(2017年4期)2018-01-09 05:41:09
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
船舶力学(2015年6期)2015-12-12 08:52:20
护理实践与研究(2015年9期)2015-03-20 09:00:08