
纯电动越野车再生制动控制策略研究
2015-06-07 11:22:58宋百玲周学升
重庆交通大学学报(自然科学版) 2015年4期
宋百玲,周学升, 杨 瑞
(东北林业大学 交通学院,黑龙江 哈尔滨 150040)
纯电动越野车再生制动控制策略研究
宋百玲,周学升, 杨 瑞
(东北林业大学 交通学院,黑龙江 哈尔滨 150040)
针对纯电动越野汽车对能量和功率的双重要求,将超级电容引入到纯电动汽车的储能系统中,组成了超级电容-蓄电池的双能量源储能结构。分析了纯电动汽车仿真软件ADVISOR中的再生制动控制策略的不足,提出了新的基于ECE法规的串联再生制动控制策略。利用MATLAB/Simulink建立双能量源纯电动越野车再生制动系统仿真模型。通过典型的道路循环工况,对提出的制动力分配方案与ADVISOR中的再生制动控制策略进行仿真对比。仿真结果表明:再生制动控制策略回收了33.88%的制动能量,在很大程度上提高了车载能量的利用率和车辆的动力性能,增加了汽车的续驶里程。
车辆工程;超级电容;双能量源;再生制动系统;串联再生制动控制策略
随着能源危机和环境污染的加剧,纯电动汽车具有节能、环保的突出优点,是新能源汽车发展的重要方向[1-2]。电源是电动汽车的心脏,电源技术将是电动汽车研发的核心技术。超级电容器作为一种新型电源由于其特有的性能优势,备受人们重视[3]。超级电容和蓄电池相比具有比功率非常高,使用寿命长的优点,能实现迅速充放电,在电动汽车加速和启动时能提供足够大的峰值电流,制动时可以瞬间吸收电机回馈的大电流,从而达到回收车辆制动能量的目的[4-5]。
由于超级电容比能量低,难以单独作为电动汽车的能量储存装置[6-8]。因此,笔者采用蓄电池+超级电容的能量存储系统,汽车对比能量和比功率的要求可以相互分离,能提高能源的利用率,满足纯电动越野车动力性需求,增加其续驶里程。
以北京JEEP2005款为原型,在Simulink环境中构建了蓄电池和超级电容组成的双能量源储能系统再生制动仿真模块。基于ECE制动法规设计了改进的串联再生制动控制策略,对整车在CYC_UDDS循环工况下制动能量回收进行仿真分析,并与ADVISOR中的再生制动能量回收率进行比较。
1 再生制动ECE法规的限制
ECE法规对M1类汽车制动力分配系数有如下规定:
1)当制动强度Z=0.1~0.61时
φf≤(Z+0.07)/0.85,(0.1≤Z≤0.61)
(1)
φr≤(Z+0.07)/0.85,(0.1≤Z≤0.61)
(2)
φf>φr,(0.1≤Z≤0.61)
(3)
2)当制动强度Z=0.3~0.45时
φr≤(Z+0.07)/0.85的条件下,允许φr>φf。
汽车利用附着系数又被称为被利用的附着系数,定义为:
φi=Fxbi/Fzi
(4)
式中:φf为前轴利用附着系数;φr为后轴利用附着系数;Z为制动强度;φi为汽车第i轴的利用附着系数;Fxbi为汽车第i轴产生的地面制动力;Fzi为地面对汽车i轴的法向反力。
根据利用附着系数φ与制动强度Z的关系,作出纯电动越野车在空载、满载时机械制动系统的利用附着系数与制动强度的关系曲线并与ECE制动法规线画在一起,如图1。可以出纯电动越野车在满载和空载时前后利用附着系数都满足ECE法规的要求。
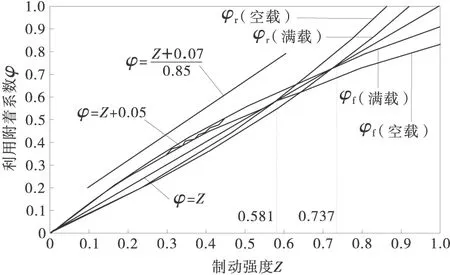
图1 后轴利用附着系数和ECE法规
2 单轴串联再生制动控制策略
2.1 ADVISOR制动力控制模块分析
在ADVISOR中,制动控制模块用来调节再生制动力和摩擦制动力之间的分配比例。ADVISOR中的再生制动策略是由检测到的汽车速度查表实现制动力分配控制的。制动过程中,再生制动力和摩擦制动力的比例随车速的变化进行动态改变。这种控制算法没有考虑ECE法规的限制,不能保证汽车制动安全性。而且没有充分利用电机的再生制动能力,回收的制动能量有限。ADVISOR制动力控制模块如图2。
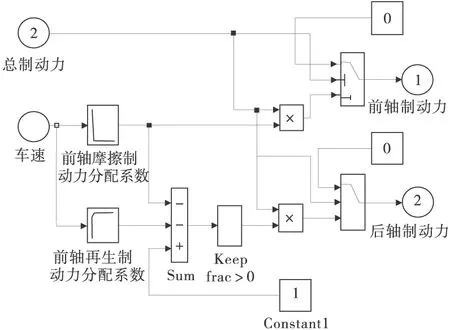
图2 ADVISOR中再生制动力分配模块
2.2 再生制动控制策略数学模型
并联式制动能量回收系统的制动力分配关系简单,比较容易实现,但在同等目标制动强度下所获得的实际制动强度会大于无能量回收制动系统汽车的制动强度,驾驶员制动感觉波动大,制动能量回收率也相对较低[9-12]。
笔者采用单轴串联再生制动系统,只需在后轴制动管路上安装调压机构,使后轴制动力大小可以进行调节。制动时,前后轴制动力和传统制动一样按机械制动力分配系数确定,电机再生制动力根据车速、超级电容SOC确定,并与后轴摩擦制动力进行比较,后轴原来分配的摩擦制动力减去电机制动力为后轴实际摩擦制动力。
如果车速V<5 km/h或者SOC>0.9,关闭再生制动,实际电机制动力矩Tm_act=0,汽车完全为机械制动无再生制动。
如果车速V>5 km/h且SOC<0.9,开启再生制动,由电机峰值转矩Tm_mot和电机制动力Tm_bat,分别得到再生制动转矩和电机制动转矩:
Tm_reg=min(Tm_mot,Tm_bat)
(5)
Tm_act=min(Tbr,Tm_reg)
(6)式中:Tm_reg为可回收的电机再生制动力矩;Tm_mot为电机峰值转矩;Tm_bat为根据电容充电功率确定的电机制动力矩;Tm_act为实际电机制动力;Tbr为后轴制动力。
根据制动信号,检测制动缸压力,然后计算需要的总制动力Tb。
由Tbf=βTb,Tuf=Tbf得到前制动器制动力。式中:Tbf为前轴制动力;Tuf为前制动器制动力;Tb为需要的总制动力。
由Tbr=(1-β)Tb,Tur=Tbf-Tm_act得到后制动器制动力。式中:Tbr为后轴制动力;Tur为后制动器制动力。
2.3 整车再生制动系统仿真模型的建立
笔者采用后向仿真建模方法进行再生制动系统仿真模型的建立。仿真中把能量传递作为主线,根据再生制动控制策略和功率分配策略仿真计算不同循环工况下制动能量回收情况。
越野车辆行驶工况复杂,对电机需求功率的变化比较大,而低功率放电是蓄电池最佳工作状态。采用蓄电池+超级电容的双能量源储能系统,可以充分利用超级电容功率变化满足电机功率需求的不同,起到削峰填谷的作用,从而使蓄电池处于恒功率放电状态。再生制动时,回收的能量完全由超级电容吸收,功率分配策略简单高效,对蓄电池起到保护作用,延长蓄电池使用寿命。
整车再生制动系统顶层模型如图3。该再生制动系统顶层模型由整车动力学模型,电机模型,超级电容模型,控制策略模型等组成。
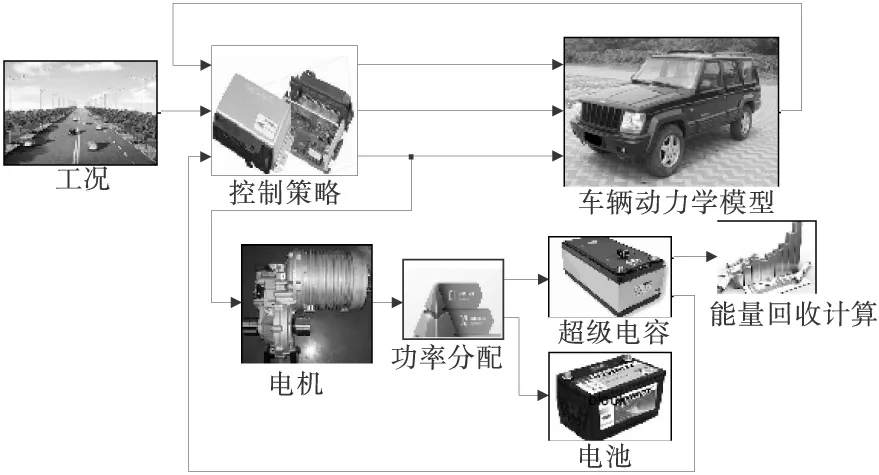
图3 整车再生制动系统顶层模型
2.4 再生制动控制策略仿真模型
笔者建立的再生制动控制策略根据电池SOC、车速V和制动强度Z得到汽车制动所需的目标制动力和再生制动力。其中:目标制动力考虑ECE法规的限制,从而保证汽车制动安全性。计算再生制动力时需要考虑电机和超级电容能够允许的再生制动力。最后根据设计的再生制动策略进行前后轮制动力分配。
建立的串联再生制动控制策略模型如图4。

图4 单轴串联再生制动控制策略模型
根据ECE制动法规的要求,利用Simulink作出ECE法规的限制子模块模型如图5。
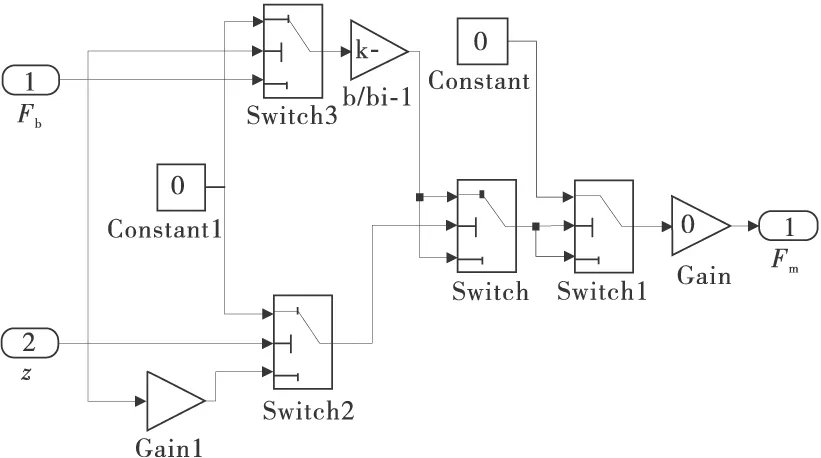
图5 ECE法规限制子模块
3 整车再生制动仿真分析
3.1 常规制动工况下的仿真分析
设汽车制动时超级电容SOC初始值为0.7,初始制动车速为 60 km/h,分别在小制动强度(Z=0.1)、中等制动强度(Z=0.3)、紧急制动强度(Z=0.7),对车速、制动距离和超级电容SOC变化进行分析,如图6。
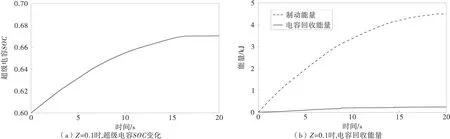

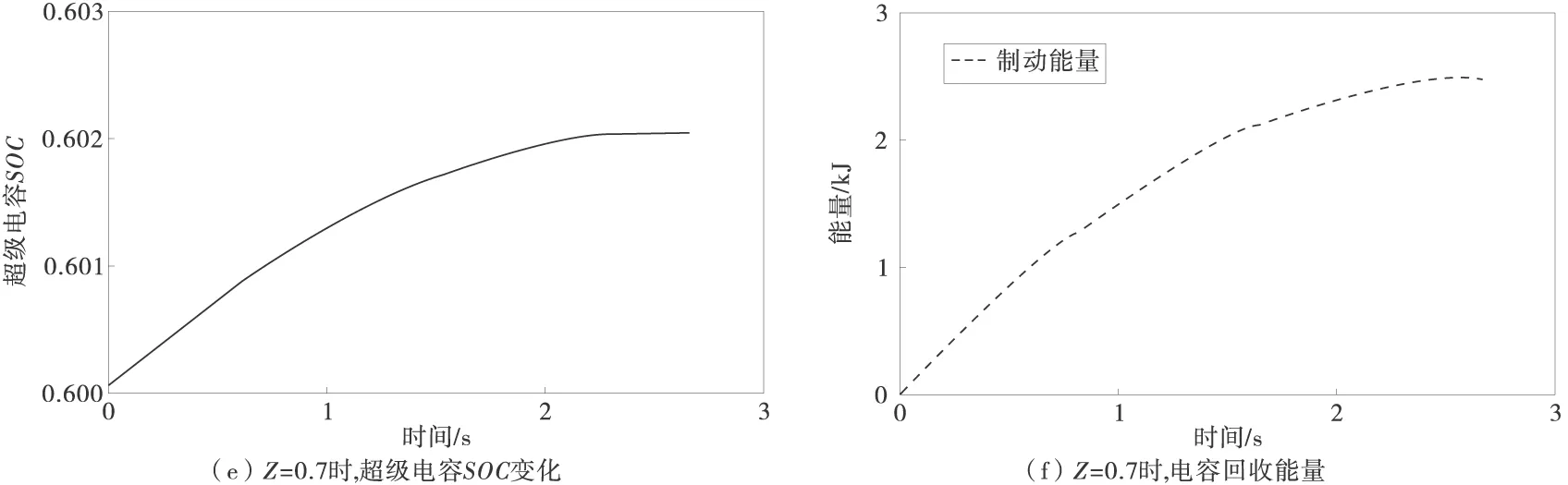
图6 超级电容SOC的变化和电容回收能量情况
由图6可以看出:初始车速为60 km/h,小制动强度时,电动汽车制动时间较长,电池SOC的增加比较大,电容回收较多的能量;中等制动强度时,电动汽车制动时间减少,电池一定程度增加,电容回收能量减少;紧急制动强度时,电池SOC基本没有增加,电容不回收能量。
3.2 循环工况制动仿真分析
设定电池SOC值为 0.7,选取CYC_UDDS 工况进行仿真分析。循环工况车速及制动强度变化如图7。整个循环工况制动过程中,汽车制动能量和电容回收能量随时间变化关系如图8。采用单轴串联再生制动控制策略与采用ADVISOR再生制动控制策略超级电容SOC变化情况对比,及超级电容回收能量情况对比如图9。
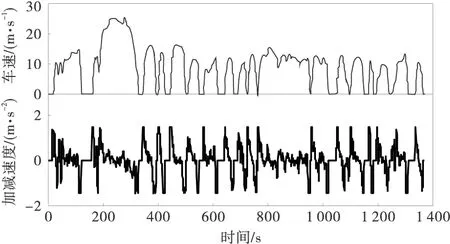
图7 CYC_UDDS工况的车速及制动强度变化
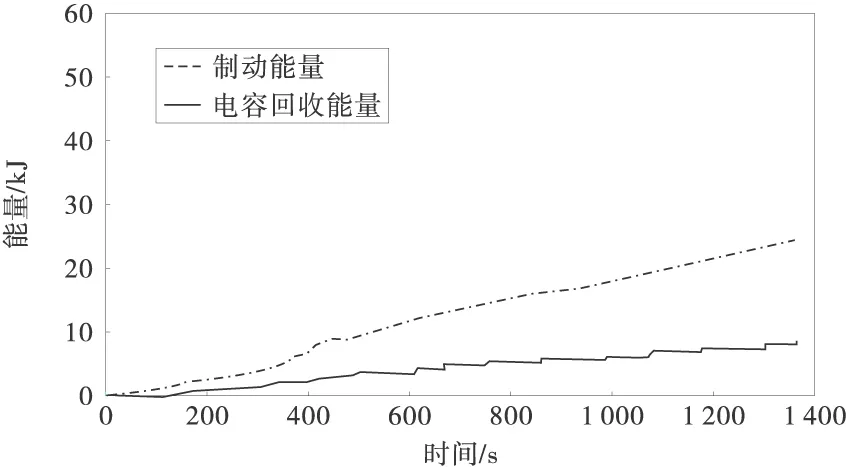
图8 汽车制动能量和电容回收能量对比关系

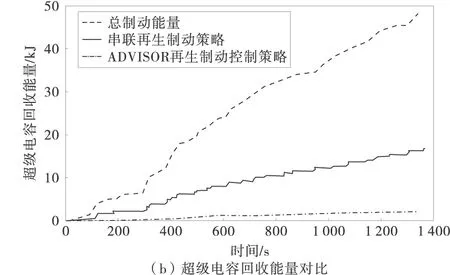
图9 同一循环工况下不同控制策略SOC变化及超级电容回收能量对比
笔者定义超级电容回收能量占电机制动能量百分比为能量回收率。根据能量回收计算得到的数据为串联再生制动控制策略能量回收率为33.88%;Advisor再生制动控制策略能量回收率为4.78%。
4 结 语
笔者建立了纯电动越野汽车双能量源再生制动系统仿真模型,提出了一种单轴串联再生制动控制策略,该控制策略只需在后轴制动管路上添加一个调压阀,结构上容易实现。通过仿真对比该控制策略比ADVISOR中的再生制动控制策略能量回收率增加了29.1%,有利于纯电动越野车再生制动实车应用。
[1] 陈清泉,孙逢春,祝嘉光.现代电动汽车技术[M].北京:北京理工大学出版社,2002:100-117. Cheng Qingquan,Sun Fengchun,Zhu Jiaguang.Technology of Electric Vehicle [M].Beijing:Beijing Institute of Technology Press,2002:100-117.
[2] 王军,熊冉,杨振迁.纯电动大客车制动能量回收系统控制策略研究[J].汽车工程,2009,31(10):932-937. Wang Jun,Xiong Ran,Yang Zhenqian.A study on the control strategy for brake energy regeneration system in pure electric buses [J].Automotive Engineering,2009,31(10):932-937.
[3] Osuka A,Matsuoka Y,Yutsu T,et al.Development of pinion-assist type electric power steering system [J].KOYO Engineering Journal,2002,161E:46-51.(in English)
[4] 张亚军,杨盼盼.纯电动汽车再生制动系统的建模与仿真[J].武汉理工大学学报,2010,32(15):90-94. Zhang Yajun,Yang Panpan.Modeling and simulation of regenerative braking system for pure electric vehicle [J].Journal of Wuhan University of Technology,2010,32(15):90-94.
[5] 邓涛,孙东野,秦大同,等.CVT混合动力汽车再生制动系统仿真[J].机械工程学报,2009,49(5):214-220. Deng Tao,Sun Dongye,Qin Datong,et al.Regenerative braking simulation for hybrid electric vehicle with continuously variable transmission [J].Chinese Journal of Mechanical Engineering,2009,49 (5):214-220.
[6] Gao Yimin,Chen Liping,Mehrdad E.Investigation of the effectiveness of regenerative braking for EV and HEV [J].SAE Paper,1999,29(10):26-28.
[7] 刘宏伟,赵文平,吕奉阳.CA6700EV 纯电动客车再生制动控制策略研究[J].汽车技术,2009,17(8):25-30. Liu Hongwei,Zhao Wenping,Lv Fengyang.A study on control strategy for regenerative braking for CA6700EV electric bus [J].Automobile Technology,2009,17(8):25-30.
[8] 赵国柱,杨正林,魏民祥,等.基于ECE 法规的电动汽车再生制动控制策略的建模与仿真[J].武汉理工大学学报:交通科学与工程版,2008,32(1):149-152. Zhao Guozhu,Yang Zhenglin,Wei Minxiang,et al.Modeling and simulation of control strategy for regenerative braking in EV and HEV based on ECE regulation [J].Journal of Wuhan University of Technology:Transportation Science & Engineering,2008,32(1):149-152
[9] 李军,邹发明,涂雄,等.基于模糊控制策略的PHEV仿真研究[J].重庆交通大学学报:自然科学版,2013,32(2):329-334. Li Jun,Zou Faming,Tu Xiong,et al.Simulation research on PHEV based on fuzzy logic control strategies [J].Journal of Chongqing Jiaotong University:Natural Science,2013,32(2):329-334.
[10] Michael P,George D,Dennis N A.Development and use of a regenerative braking model for a parallel hybrid electric vehicle [J].SAE Paper,2000,30(1):1-12.
[11] 俞剑波,何仁.混合动力电动汽车混合制动技术分析[J].重庆交通大学学报:自然科学版,2013,32(4):705-711. Yu Jianbo,He Ren.Hybrid braking technology for hybrid electric vehicle [J].Journal of Chongqing Jiaotong University:Natural Science,2013,32(4):705-711.
[12] 隗寒冰,何义团,李军,等.混合动力电动汽车控制策略—分类、现状与趋势[J].重庆交通大学学报:自然科学版,2013,32(5):1049-1054. Wei Hanbing,He Yituan,Li Jun,et al.Classification,state of the art and development tendency of strategies for hybrid electric vehicles [J].Journal of Chongqing Jiaotong University:Natural Science,2013,32(5):1049-1054.
Regenerative Braking Control Strategy for Pure Electric Off-Road Vehicle
Song Bailing, Zhou Xuesheng, Yang Rui
(Traffic College, Northeast Forestry University, Harbin 150040, Heilongjiang, China)
For the double demand of energy and power of pure electric off-road vehicle, the super capacitor was introduced into the pure electric vehicle energy storage system, constituted structure of dual energy source that was made up of super capacitor and battery energy. The deficiency of control strategy for regenerative braking in the electric vehicle simulation software ADVISOR was analyzed. The series regenerative braking control strategy based on the ECE regulations was put forward. MATLAB/Simulink was used to establish simulation model of regenerative braking system. By loading the typical road cycle of regenerative braking, the new regenerative braking control strategy in ADVISOR was contrasted with the control strategy. The simulation results show that, the new control strategy of regenerative braking can recover 33.88% braking energy, under the premise of ensuring the vehicle braking stability, and improve greatly the dynamic performance and the using rate of the vehicle energy, which increases the travel distance of electric cars.
vehicle engineering; super capacitor; double energy source; regenerative braking system; cascade regenerative braking control strategy
10.3969/j.issn.1674-0696.2015.04.32
2014-07-13;
2014-08-28
国家自然科学基金项目(51405075);中央高校基本科研基金项目(2572014BB08);中国博士后科学基金项目(2013M541329)
宋百玲(1972—),女,黑龙江宾县人,副教授,博士,主要从事动力机械自动控制与测试方面的研究。E-mail:sbllht@163.com。
周学升(1987—),男,山东潍坊人,硕士研究生,主要从事电动汽车节能技术方面的研究。E-mail:765515766@163.qq.com。
U469.72
A
1674-0696(2015)04-161-05
猜你喜欢
资源信息与工程(2021年5期)2022-01-15 05:37:42
能源工程(2020年6期)2021-01-26 00:55:22
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
通信电源技术(2016年1期)2016-04-16 04:57:26
电源技术(2015年1期)2015-08-22 11:16:20
电源技术(2015年7期)2015-08-22 08:48:50
重庆交通大学学报(自然科学版)(2015年4期)2015-06-07 11:22:58
军民两用技术与产品(2015年23期)2015-01-08 08:04:38
