
辅机故障减负荷局部控制逻辑设计与仿真
2015-06-05 14:56:40康立杰陈伟梁伟平马平
综合智慧能源 2015年1期
康立杰,陈伟,梁伟平,马平
(1.华北电力大学自动化系,河北保定 071003;2.北京电研华源电力技术有限公司,北京 102200)
辅机故障减负荷局部控制逻辑设计与仿真
康立杰1,陈伟2,梁伟平1,马平1
(1.华北电力大学自动化系,河北保定 071003;2.北京电研华源电力技术有限公司,北京 102200)
秦皇岛热电厂320MW燃煤机组一次风机辅机故障减负荷设计中,出现了辅机故障减负荷信号动作后不能顺序停运磨煤机的问题,针对这一问题进行了改进设计。在磨煤机运行的各种情况下,用MATLAB仿真软件对所设计的改进方案进行仿真试验,试验结果表明,改进后的设计方案能够满足机组在辅机故障减负荷时的要求,可以保证机组安全、稳定运行。
辅机故障减负荷;磨煤机;仿真试验;设计;MATLAB仿真软件
1 问题的提出
辅机故障减负荷(RB)功能为:当机组带80%以上负荷运行时,在重要辅机(如送风机、引风机、一次风机和给水泵)有1台事故跳闸(或汽动给水泵跳闸,备用电动给水泵未能联锁自投)的情况下,控制机组快速将负荷减少到单侧辅机运行所能承受的目标值(约50%负荷)[1-2];同时对给水、燃烧、减温等自动调节系统进行相应的快速调整,使水位、汽压、汽温等重要参数维持在允许的变化范围内。机组在该辅机跳闸后,在允许负荷范围内继续稳定运行。RB功能是机组实现单元机组集中控制,提高自动化水平的标志,是减少人为操作错误造成机组停运的技术保障,对保证机组安全、稳定运行具有重要意义[3-5]。
秦皇岛热电厂#3机组为320MW抽汽供热机组,其锅炉为亚临界、采用强制循环、一次再热、平衡通风、正压直吹制粉、四角切圆、同心反切燃烧类型。汽轮机为中间再热、单轴、双缸双排汽凝汽式,其额定进汽参数为16.7MPa/538℃/538℃。在设计该厂#3机组的协调控制系统(CCS)、电池管理系统(BMS)以及数字式电液调节系统(DEH)时均考虑了RB功能。当机组负荷大于80%且协调控制系统投入时,运行人员可选择将RB功能投入[5]。
在一次风机跳闸的RB逻辑设计中,顺序切除磨煤机投运油枪控制尤为重要,因为它不仅影响锅炉的安全燃烧,同时也影响磨煤机的安全运行。跳闸磨煤机投运油枪的控制逻辑具有2种结构:(1)自上而下(或相反)依次切除相应的磨煤机,需要时判断底层(或顶层)磨煤机是否运行后投运相关油枪;(2)根据运行磨煤机组合关系保留相邻磨煤机运行,需要时投运相关油枪。跳闸磨煤机的间隔时间比一次风机及给水泵RB的切磨煤机间隔时间短。该厂#3机组配备6台磨煤机(5台运行,1台备用),在RB发生后保留底层3台磨煤机(即A磨煤机、B磨煤机、C磨煤机)运行,同时按照磨煤机的运行状况快速投运相关油枪[6-7],该系统属于自上而下依次切除相应的磨煤机,跳闸磨煤机回路的目的是为了快速减负荷。为防止磨煤机堵塞而危及设备安全,当辅机跳闸信号动作后,必须保证有1台磨煤机立即停运,然后再按规定顺序跳闸磨煤机(以下简称跳磨),才能保证负荷能够快速降至机组RB目标负荷,以保证机组安全、稳定运行[8]。
2 RB设计存在的问题与改进方案
2.1 原RB跳磨设计存在的问题
在原系统中,当RB信号动作时,若F,E,D,C,B,A磨煤机均为运行状态,则可以及时地跳第1台磨煤机即F磨煤机,若F磨煤机未运行,则第1台磨煤机为E磨煤机,E磨煤机将会延时10 s后才能停止运行,而不能立即停运,这样很有可能会出现磨煤机堵塞现象,给生产带来危险,这是不允许的。原控制系统设计逻辑图如图1所示。

图1 原跳磨逻辑
2.2 改进方案
为了避免堵塞磨煤机,当辅机跳闸信号动作后,可立即停运最上层磨煤机,快速降负荷至机组RB目标负荷,保证机组安全稳定运行,重新设计了RB跳磨的控制逻辑,如图2所示。
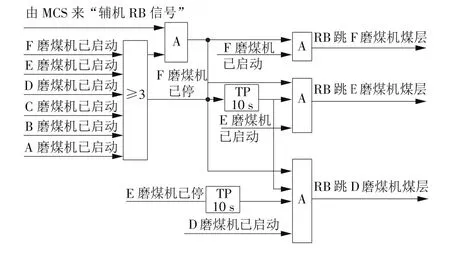
图2 改进后的跳磨逻辑
该方案的设计是考虑了当有RB信号动作时,可及时地跳第1台磨煤机(不管第1台磨煤机是F磨煤机、E磨煤机还是D磨煤机),以免发生堵塞磨煤机事故。同时也可以保证按F磨煤机→E磨煤机→D磨煤机的顺序依次停运。
3 仿真研究
3.1 设计原理
RS触发器具有保持功能,当有脉冲信号时,代表相应的磨煤机处于运行状态。为保证机组安全稳定运行,底层3台磨煤机不能跳闸,RB动作后只跳闸F磨煤机、E磨煤机和D磨煤机。设计原理如图3所示。
(1)当脉冲信号1、脉冲信号2、脉冲信号3都作用时,代表F,E,D磨煤机均处于运行状态。当RB跳磨指令动作后,F磨煤机立即停运不会延时,然后延时10 s后跳E闸磨煤机,再延时10 s后跳闸D磨煤机,按F磨煤机→E磨煤机→D磨煤机顺序依次跳闸。

图3 设计原理图
(2)当脉冲信号1没有作用,只有脉冲信号2和脉冲信号3时,代表F磨煤机处于停运状态,只有E煤机磨和D磨煤机运行。当RB跳闸磨煤机指令动作后,E磨煤机会立即停运不会延时,然后延时10 s后跳闸D磨煤机。
(3)当脉冲信号1、脉冲信号2都没有作用,只有脉冲信号3时,代表F磨煤机、E磨煤机都处于停运状态,只有D磨煤机运行。当RB跳闸磨煤机指令动作后,D磨煤机会立即停运不会延时。
3.2 应用MATLAB软件进行仿真试试验
应用MATLAB软件对所做的设计进行仿真试验,验证当RB跳闸磨煤机指令动作后,在磨煤机运行的各种情况下,都可以立即跳闸第1台磨煤机,保证负荷能够快速降至机组RB目标负荷,确保机组可以安全、稳定运行。仿真结构图如图4所示。
(1)当脉冲信号1、脉冲信号2和脉冲信号3都作用时仿真结果如图5所示。

图4 仿真结构图
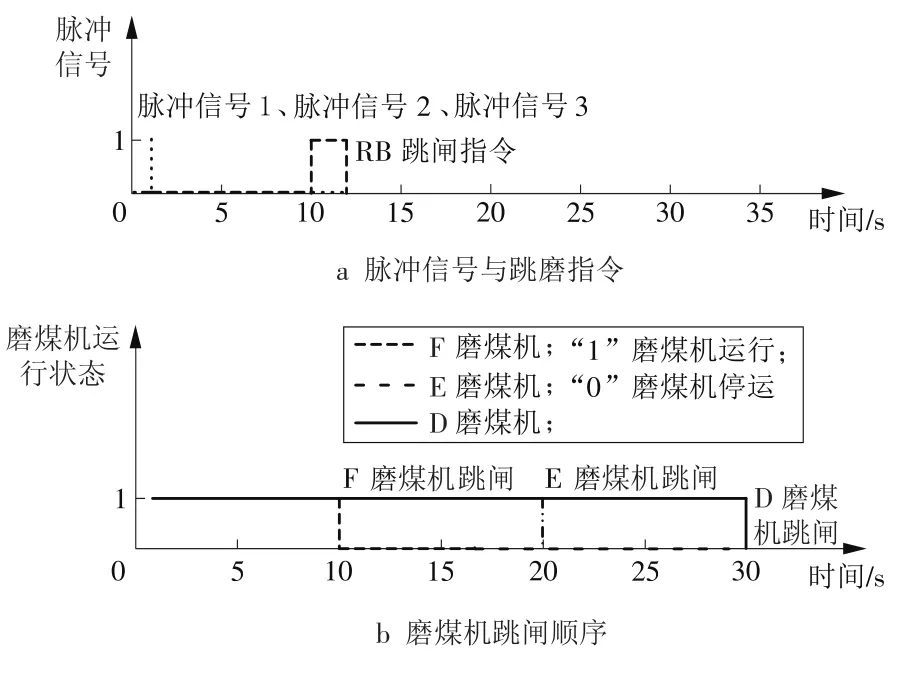
图5 第1种情况下的仿真结果
从图5可以看出,RB跳闸指令动作后,F磨煤机立即跳闸,没有延时,然后延时10 s按F磨煤机、E磨煤机、D磨煤机顺序依次跳闸。
(2)当脉冲信号1没有作用,只有脉冲信号2和脉冲信号3时,仿真结果如图6所示。

图6 第2种情况下的仿真结果
从图6中可以看出,RB跳闸指令动作后,因F磨煤机未启动,故第1台为E磨煤机,E磨煤机立即跳闸,没有延时,然后延时10 s后D磨煤机跳闸。
(3)当脉冲信号1、脉冲信号2都没有作用,只有脉冲信号3时,仿真结果如图7所示。

图7 第3种情况下的仿真结果
从图7中可以看出,RB跳闸指令动作后,因为F磨煤机、E磨煤机均未启动,故第1台为D磨煤机,D磨煤机立即跳闸,没有延时。
4 结论
通过仿真结果可以看出,改进后的RB跳闸磨煤机逻辑可实现RB信号动作,立即停运最上层磨煤机,然后顺序跳闸磨煤机,这样可以有效防止磨煤机堵塞,使负荷能够快速降至机组RB目标负荷,以保证机组安全、稳定运行。改进后的设计方案已应用在现场实际中,并成功通过了一次风机RB试验,
且试验完全满足DL/T 1213—2013《火力发电机组辅机故障减负荷技术规程》中对一次风机RB的试验要求。
[1]朱北恒.火电厂热工自动化系统试验[M].北京:中国电力出版社,2006.
[2]陆梁.辅机故障快速减负荷调试方案的改进及应用[J].电力与能源,2013,34(3):254-258.
[3]王鹏鹏,孙国强.310MW机组辅机故障减负荷控制策略分析及完善[J].发电设备,2013,27(1):13-16.
[4]肖晓文,张曦.600MW超临界机组RB功能控制策略及应用研究[J].广东电力,2010,23(11):94-96.
[5]朱北恒.RB控制技术试验研究[J].中国电力,2004,37(6):67-70.
[6]李华东.超临界与亚临界机组RB控制策略比较[J].热力发电,2009,38(7):14-17.
[7]陈小强,尹峰,罗志浩.1 000 MW超超临界机组RUNBACK功能试验及其分析[J].浙江电力,2008,27(1):23-26.
[8]赵志丹,陈志刚,郝德锋,等.火电机组RB控制策略及其试验中应注意的问题[J].热力发电,2010,39(6):48-50.
(本文责编:王书平)
TK 323:TK 223.25
:B
:1674-1951(2015)01-0016-03
康立杰(1989—),女,河北承德人,在读硕士研究生,从事发电厂生产过程自动化方面的研究(E-mail:tanhuahenmei@163.com)。
陈伟(1986—),男,河北承德人,工程师,从事自动化在智能电网与工业控制中的应用方面的工作。
梁伟平(1963—),男,河北承德人,副教授,硕士研究生导师,从事火力发电厂电动机调速技术节能改造、热工控制系统结构及参数优化、智能控制方面的教学和应用研究工作(E-mail:lwp-123a@vip.sina.com)。
马平(1961—),女,湖南长沙人,教授,硕士研究生导师,从事过程控制、火电厂单元机组控制和优化、计算机原理及应用等方面的教学和研究工作(E-mail:maping2067@163. com)。
2014-05-13;
2014-08-29
猜你喜欢
湖北电力(2022年6期)2022-03-27 08:54:30
电站辅机(2021年4期)2021-03-29 01:17:00
自动化仪表(2020年10期)2020-11-13 03:31:00
西藏科技(2016年5期)2016-09-26 12:16:43
广西电力(2016年4期)2016-07-10 10:23:38
通信电源技术(2016年5期)2016-03-22 01:09:48
船舶力学(2015年6期)2015-12-12 08:52:20
汽车维护与修理(2014年10期)2014-02-28 12:15:01
机械与电子(2014年1期)2014-02-28 02:07:34
河南科技(2014年23期)2014-02-27 14:19:00
