
基于MPPT的小型风光互补系统控制策略的研究
2015-06-01 10:03:03牛欢欢郑喻
电气开关 2015年5期
牛欢欢 ,郑喻
(三峡大学电气与新能源学院,湖北 宜昌 443002)
基于MPPT的小型风光互补系统控制策略的研究
牛欢欢 ,郑喻
(三峡大学电气与新能源学院,湖北 宜昌 443002)
为了确保小型风光互补发电系统的可靠性运行,提高能源利用率,提出了包含最大功率跟踪控制,负载跟踪控制和蓄电池充放电控制的功率协调控制策略,并在MATLAB/Simulink环境下搭建整个系统的仿真模型,验证了控制策略的可行性。
风光互补发电系统;协调控制策略;最大功率跟踪控制;负载功率跟踪控制
1 引言
目前,风力发电和光伏发电作为清洁能源越来越受到人们的重视。本文是基于风能太阳能在季节分布上良好的互补性,提出了由风力机和光伏阵列及蓄电池作为储能装置构成的风光互补发电系统,从而弥补单一能量密度低、稳定性差,受气象影响大等缺点。文中对风光互补系统的MPPT控制进行了分析探讨,提出较经济、实用的控制策略。
2 系统总体结构
小型风光互补发电系统由能量产生、能量储存、能量消耗三个环节构成,总体结构。
如图1所示。能量产生环节又分为风力发电和光伏发电两部分;能量储存环节由蓄电池来承担,引入蓄电池是为了消除由于天气等原因引起的能量供应和能量需求的不平衡,在整个系统中起到了调节能量和平衡负载的作用;能量消耗环节就是各种用电负载,可分为直流和交流两类负载,交流负载需要逆变器连入电路。
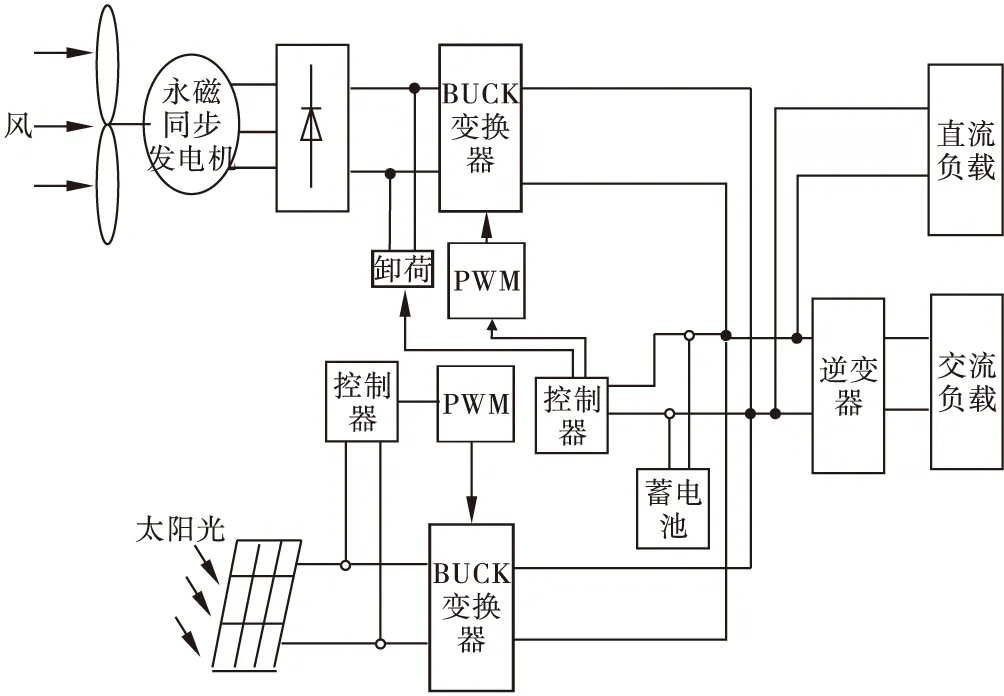
图1 小型风光互补系统结构框图
3 系统的功率协调控制策略
3.1 最大功率跟踪控制
在风光发电应用的过程中,通过提高风能和太阳能的利用率来提高用户的经济效益,因此,使风力机和光伏阵列处于最大功率输出具有重要的意义。目前,风力发电最大功率跟踪控制最常用的MPPT有三种:叶尖速比法,爬山发,功率信号反馈法[1],本文中选择的风力发电最大功率控制方法为爬山法。太阳能MPPT的控制常用的有电导增量法、扰动与观察法、恒定电压法[2-4]这三种,本文在光伏阵列进行最大功率跟踪控制时选用的是电导增量法。
3.2 负载功率跟踪控制
小型风光互补发电系统捕获的能量既要供给负载,又要给蓄电池充电。当系统捕获的能量大于负载和蓄电池可接受最大功率之和时,蓄电池会处于过充电状态,此时,风力机的转速上升,将严重危害系统的安全运行。为了保护蓄电池和风力机的安全,需要跟踪蓄电池可接受的最大功率和负载所需功率之和,使风力机的工作点偏离最佳叶尖速比工作点,进而减小风能的吸收,使系统保持在安全的状态下运行。当系统工作于负载功率跟踪状态时,由于端电压变化不大,可以设定负载电流和蓄电池设定的充电电流作为输入,与DC/DC变换器的实际输出电流进行比较,其误差经PI调节后产生PWM调制信号,通过调节风力机侧DC/DC变换器的占空比,从而来控制动态变化的负载电流和随着控制方法不同而变化的蓄电池的充电电流之和,以此控制蓄电池的充电功率,使其保持在最大可接受的 蓄电池充电功率范围内。

图2 负载功率跟踪控制原理图
3.3 蓄电池充放电控制
自然条件的随机变化,使得小型风光互补发电系统发出的功率也随之波动,从而导致蓄电池很少能快速、完整地一次性给蓄电池充满电。蓄电池的充电倍率较低大概为0.01~0.02C,放电电流较小,放电倍率大概为0.004~0.05C。针对蓄电池这种长期处于浮充和循环的工作模式,本文中采用的是改进三段式充电方法[5-6]。
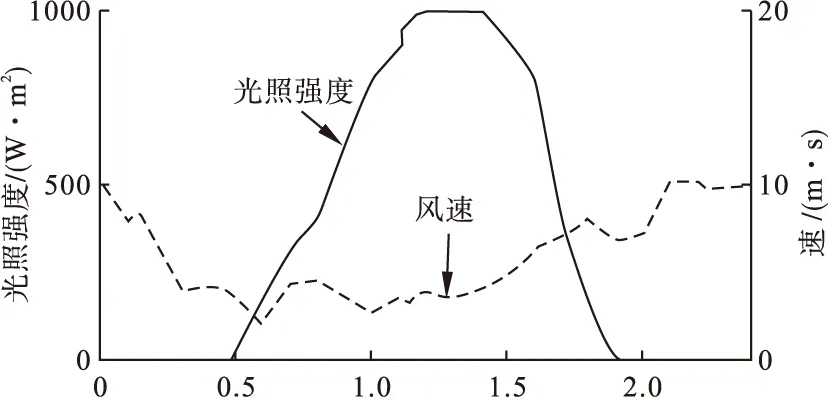
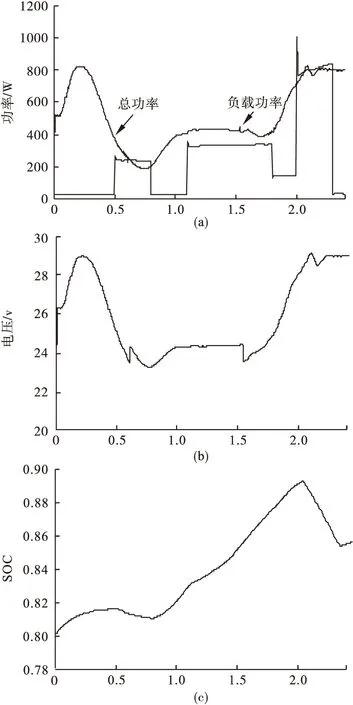
在充电初期,首先检测蓄电池的荷电状态SOC,如果荷电状态大于98%,表明蓄电池充满电,对蓄电池进行涓流充电,补充其自放电能量损失,使其减少发生析气反应。如果蓄电池荷电状态小于98%,检测蓄电池端电压和电流,判断蓄电池端电压Uf>Uset,若Uc>Uset,进行恒压充电,减少水解反应发生,避免蓄电池过充,保证蓄电池安全。若Uc 对于放电,蓄电池要设置最低放电阈值电压,高于最低放电电压阈值时,尽可能满足负载需求,一旦低于这个阈值电压,立即切断蓄电池,避免蓄电池过放。 在MATLAB/Simulink环境下,建立小型风光互补发电系统的仿真模型,如图3所示。光伏阵列与风力机分别连接两个BUCK变换器[7],进行功率协调控制和蓄电池充放电控制,连接到同一直流母线上。这样充放电与功率控制使用一个变换器,节约了硬件成本。控制器采取风力发电和光伏发电独立控制的形式[8-9],这样可以防止控制器发生故障时,系统完全瘫痪,不能对负载供电的危险。一旦其中一个控制器发生故障时,另一个还能在自然条件允许的情况下对负载进行持续供电。虽然成本比一个控制器集成控制要高,但是其安全系数得到了很大的提高。 5.1 互补性分析 首先从光伏阵列来说,由于光伏阵列对温度的影响变化没有光照强度敏感,且一天之内的温度变化范围并不是很大,所以把光伏阵列的温度设置为恒定值25℃。从图4可知,早六点到晚六点是一天中光照强度最大的时候,在这一时间段内,光伏阵列一直处于追踪最大功率的工作状态,而在其他时间段内,光伏阵列是处于不工作状态。 对于风力机,由于在夜间,风速较大,风力机处于负载功率跟踪状态,跟踪负载和蓄电池可接受的最大功率之和。其余时间段,风力机则处于最大功率跟踪控制状态。 从以上分析可以看出,在一天当中,风力机与光伏阵列协调工作,根据气象条件和用户用电需求进行功率控制,既满足了用户的功率需求,又保证了蓄电池的安全。 图3 系统仿真模型 图4 互补性分析 5.2 充放电控制分析 对蓄电池的充放电状态可以对照图5。在0~0.3s,光伏子系统无光照不工作,只有风力机工作,但是负载较轻,光伏阵列和风力机所发的功率大于负载需求,因此SOC不断增加,蓄电池端电压也随之不断增加,蓄电池进行MPPT充电。在0.3~0.4s,光伏子系统和风力子系统所发功率大于负载和蓄电池所能接受的最大功率之和,风力机处于负载功率跟踪状态,蓄电池电压大于预设电压值,蓄电池处于恒压充电阶段。在0.5~0.7s,光伏阵列和风力机所发功率不能满足用户用电需求,蓄电池处于放电状态,SOC逐渐减小。在0.7~1.7s,光伏阵列所发功率较大,风力机所发功率较小,刚刚能满足用电需求用户用电需求,且有小部分剩余电能进行储能,蓄电池进行MPPT充电。在1.7~2s,风速逐渐变大,风力机所发功率逐渐增加,风力机和光伏阵列所发功率大于用户用电需求,且剩余电能较多,蓄电池进行MPPT充电,因此SOC显著增 图5 充放电控制仿真结果 加。2~2.3s,加重用电负荷,光伏阵列和风力机所发功率不能满足用户用电需求,蓄电池进行放电,使得SOC不断降低。2.3~2.4s,光伏阵列和风力机所发功率大于用户用电需求,蓄电池进行充电,SOC开始增加。 综上分析,小型风光互补发电系统的功率控制策略很好地完成了其职能,满足了用户用电需求,保证了蓄电池和风力机的安全,使系统在任何工况下都能处于高效、稳定的工作状态。 [1] 齐志远,王生铁.小型风力发电系统最大功率跟踪控制的扰动法[J] .内蒙古工业大学学报,2005,24(2):91-96. [2] 陈兴峰,曹志峰,许洪华,等.光伏发电的最大功率跟踪算法研究[J] :可再生能源,2005,119(1):8-11. [3] 雷元超,陈春根,沈骏,等.光伏电源最大功率点跟踪控制方法研究[J] :电工电能新技术,2004,23(3):76-80. [4] 周林,武剑,栗秋华,等.光伏阵列最大功率点跟踪控制方法综述[J] .高电压技术,2008,34(6):1145-1152. [5] 李立伟,陈伟斌,马平.独立光伏电站蓄电池优化管理研究[J] .电力自动化设备,2009,29(4):110-112. [6] 朱松然.铅酸蓄电池技术[M].2版.北京:机械工业出版社,2002. [7] 朱宁.风力发电PWM变流器及其控制策略[D].北京:北京交通大学,2007:10-11. [8] 王彦国.直驱式风力发电系统及其控制策略研究[D].北京:华北电力大学,2009:4-6. [9] 于文杰.永磁直驱风力发电系统最大风能追踪策略研究[D].吉林:东北电力大学,2008:2-3. Research on Small-scal Wind and PV Hybrid Generation System Control Strategy Based on MPPT NIUHuan-huan,ZHENGYu (College of Electrical Engineering & New Energy,China Three Georges University,Yichang 443002,China ) In order to ensure that small wind and solar power system reliably run,improve energy′s efficiency,the coordinated control strategy based on maximum power point tracking control,load power tracking control and battery charge and discharge control is put forward,And build a simulation model of the entire system in MATLAB / Simulink environment,verified the feasibility of the control strategy. Wind/PV hybrid power generation system;coordinated control strategy;maximum power point tracking control;load power tracking control 2015-01-21 陈媛冰(1991-),女,硕士,主要研究方向为电力电子高频磁技术。 1004-289X(2015)05-0038-04 TM921 B4 系统仿真模型建立
5 仿真结果及分析

6 结论
猜你喜欢
新能源汽车供能技术(2021年1期)2021-10-14 08:59:48
汽车观察(2021年11期)2021-04-24 20:47:38
海峡姐妹(2019年12期)2020-01-14 03:25:02
电子制作(2019年23期)2019-02-23 13:21:36
汽车观察(2018年12期)2018-12-26 01:05:36
测控技术(2018年5期)2018-12-09 09:04:38
快乐作文·低年级(2016年9期)2016-09-30 19:07:33
电源技术(2015年5期)2015-08-22 11:18:02
振动工程学报(2015年1期)2015-03-01 01:15:46
太阳能(2015年6期)2015-02-28 17:09:35
