四维超声成像技术在肝肾囊肿介入穿刺术中的应用价值
2015-06-01 08:58:14邹松平
中国医疗设备 2015年11期
邹松平
大庆龙南医院 物理诊断科,黑龙江大庆 163453
四维超声成像技术在肝肾囊肿介入穿刺术中的应用价值
邹松平
大庆龙南医院 物理诊断科,黑龙江大庆 163453
目的 探讨四维超声成像技术在肝肾囊肿介入穿刺术中的应用价值。方法 选取27例肝肾囊肿患者,随机分为3组(每组9人)。分别采用静态三维成像、动态三维成像、实时动态三维成像3种技术进行穿刺引导,比较3种成像技术的效果。结果 静态三维成像无法显示整个穿刺过程,只显示穿刺后穿刺针的固定位置;动态三维成像实时性差,成像较进针存在延迟,采集时间长;实时动态三维成像能实时传输穿刺过程,50%透明最大与50%表面质地模式结合、表面成像与多平面成像结合引导穿刺成像效果最佳。结论 四维超声成像技术在肝肾囊肿介入穿刺术中效果良好,其中以实时动态三维成像技术效果最佳,值得临床广泛使用。
超声成像;静态三维成像;动态三维成像;实时动态三维成像;肝肾囊肿;介入穿刺术
0 前言
目前,四维超声以其较高的准确性得到了广大影像医疗工作者的高度认可。其中,实时三维超声成像技术辅助介入穿刺拥有多种特殊优势,因此是超声引导穿刺的一条新途径。动态三维超声是运用高帧频的三维容积数据库显示三维数据,也经常运用于穿刺过程的引导中。本研究选取了27例肝肾囊肿患者,并随机分为3组(每组9人)。分别采用静态三维成像、动态三维成像、实时动态三维成像3种技术进行穿刺引导,比较3种成像技术的效果,报道如下。
1 材料与方法
1.1 一般资料
选取2013年9月~2014年6月我院进行介入穿刺术治疗的27例肝肾囊肿患者,其中男16人,女11人,年龄29~67岁,平均(42.53±16.74)岁。患者体力状态评分(KPS)为(72.75±7.69)分。将受检者随机分为3组(每组9人),分别采用静态三维成像、动态三维成像、实时动态三维成像3种超声成像技术配合实施肝肾囊肿介入穿刺术。
1.2 入组标准与排除标准
入组标准:①患有肝肾囊肿并进行介入穿刺术者;②体力状态可以完成实验且能够听从医护人员指挥者;③家属及个人同意入组观察者。
排除标准:①伴有其他重大疾病导致体力不足难以完成检查者;②有明显恶病质,不能配合治疗者;③肝肾囊肿较为严重或情况特殊不适于进行介入穿刺术者;④家属不同意入组观察治疗者。
1.3 仪器及参数设定
采用麦迪逊A8000三维超声成像系统及三维凸阵容积扫描探头,频率为5.0~7.0 MHz。
不同组别的参数设置如下:
(1)动态三维成像(4D):运用动态三维成像软件,对动态数据进行收集,显示出横向、纵向及冠状位3个不同切面,本操作不需要三维重建。
(2)实时动态三维成像(实时4D):运用4D模式Biopsy软件,选择Guide模式,选择50%表面质地混合50%透明最大显示模式。显示模式为双幅显示,将A针平面和C针平面同时显示,C针平面显示的是A针平面中取样容积的冠状切面,之后可进行穿刺。
(3)静态三维成像:运用Static 3D超声成像软件,获取静态三维图像后,返回2D系统[2]。将针尖处固定为中心点,将穿刺针整长落于A针平面与B针平面上,短轴落于C针平面上。
1.4 检查方法
穿刺前检查:穿刺前对患者进行凝血及肝肾功能检测、心电图测量,以排除穿刺禁忌证[1]。
穿刺消毒操作:采用常规方法进行消毒,铺好消毒巾,选取灭菌后的0.9%NaCl溶液作为接触剂,将三维超声探头消毒后进行定位,定位后确定扫描位置,进针麻醉[3]。
穿刺操作:针对不同的扫描方法,选择相应的穿刺方法,详见1.3。
1.5 图像分析
选取3名经验丰富的主任医师,根据超声捕捉的图像评价穿刺效果,意见不统一时请科主任会诊,最终达成一致意见。
2 结果
动态三维成像:动态三维成像技术在引导穿刺过程中除了显示常规动态三维图像,还参与了实时4D冠面成像的穿刺。动态三维成像的时间分辨率仅有7~9 帧/s,从而导致了扫描图像的时间分辨率与空间分辨率存在较大矛盾。捕捉的影像较穿刺针的前进过程存在一定的延迟,造成捕捉图像时间较慢,较实时动态三维成像相比,其准确度与灵活性稍显不足(图1)。
实时动态三维成像:实时四维冠状面的成像,提供了穿刺区域的附加信息,这在传统的二维超声模式中是不可能做到的,它在双幅格式中,同时获得了穿刺平面的轴向图像和冠状面图像(图2)。
静态三维成像:静态三维图像可较好地显示穿刺针的最后位置,但在实时观测及引导穿刺针方面略显不足(图3)。

图1 动态三维成像引导穿刺
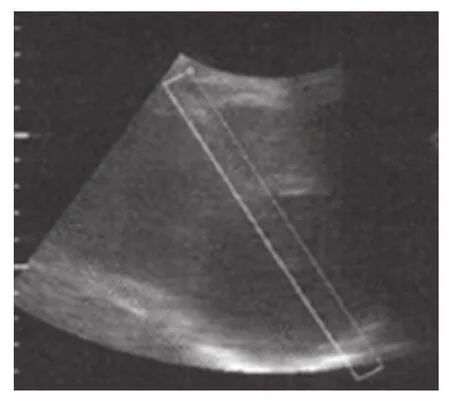
图2 实时动态三维成像引导穿刺(50%表面质地+50%透明最大)

图3 静态三维成像引导穿刺
动态三维成像与实时动态三维成像下,囊肿穿刺引导均获成功,但动态三维成像的时间分辨率过低,导致捕捉的影像较穿刺针的前进过程存在一定的延迟,造成捕捉图像时间较长,而实时动态三维成像虽未能全部显示横向、纵向及冠状面图像,但可达到完全实时状态[4]。穿刺针在实时动态三维成像条件下显示的较正常值略厚,因此进入机体后的可见性较高。实时动态三维成像在启用50%表面质地混合50%透明最大模式下显示最优效果[5]。动态三维成像模式下,表面模式病灶与针尖显示清晰率为95%,多平面模式病灶与针尖显示清晰率为100%。具体结果,见表1~2。

表1 不同动态成像技术应用于肝肾囊肿介入穿刺术的比较

表2 不同动态重建模式应用于不同成像技术重建成功率的比较
3 讨论
师的经验去估量,容易出现穿刺失败的情况[7]。采用动态三维超声成像技术引导穿刺时,可以很清晰地判断针尖与病灶之间的位置关系,准确地辅助穿刺者进针至病灶区域,而且只需确保针尖落入扫描范围内,呼吸运动对显示结果基本无影响,而普通二维超声有时会因为呼吸或移动导致针头消失[8]。动态三维超声成像的缺点在于,四维超声探头较其他探头笨重,有较强烈的震动,操作者上手前需要进行一系列的培训。
实时四维冠状面成像可以实现实时引导,显示出穿刺范围内的附加信息,优于其他扫描模式,但此方法的缺点是不能同时将横、纵、冠面同时显示。同时获取轴位图像与冠面图像有助于进针位置的确定。在实际临床操作中,实时四维超声引导进针精确度较高,增大了穿刺成功率。有研究报道,普通二维超声引导穿刺活检的病理诊断准确率为60%,而实时四维超声引导穿刺活检的病理诊断准确率为92%[9]。通过本组研究可知,采用不同的动态成像技术获取图像时,最佳成像模式、图像显示方式及针显示的清晰度都不同,因此在行介入穿刺治疗时,要选择合适的成像模式与图像显示方法。
目前,四维超声的临床应用越发广泛,作为一种现代化诊疗手段也得到了医护人员的大力认可。超声成像技术对于引导穿刺过程具有无法替代的优势,是引导穿刺术的一条新途径,超声医学即将迎来又一个新的时代。
目前,超声穿刺导航在肝肾囊肿介入穿刺术中具有广泛的应用,能够实时显示穿刺针在组织内的运动情况,为穿刺路径的选择提供依据,是超声辅助治疗的重要手段。但患者的软组织形变可能会影响到穿刺的精度,同时现有超声穿刺导航系统存在着操作复杂、定位不精确以及穿刺角度固定麻烦等问题,因此需要进行多次穿刺治疗。
关于静态三维超声成像,目前最主要的应用是某些腹部病症的诊断与胎儿的产前检查。静态三维成像技术应用于乳腺肿瘤穿刺术已有相关文献记载。静态三维超声常常用于辅助二维超声在引导穿刺后对穿刺针的位置进行确定,针尖位置判定的准确率接近40%。金鑫等[6]对170个乳腺病灶进行静态三维超声引导下穿刺术,得出结论,静态三维超声诊断恶性肿瘤的敏感性为97.1%,假阴性率为2.9%,虽然静态三维图像可较好地显示穿刺针的最后位置,但在实时观测及引导穿刺针方面略显不足。
近年来,动态三维超声成像技术迅速发展,经常应用于穿刺术中[7]。依照成像速度的快慢,动态三维超声成像可分成实时成像和非实时成像。就引导介入穿刺术而言,动态三维成像技术要优于普通的二维超声成像。二维超声存在一定的容积效应,可造成一定的误差,当病变很小,而超声未能清晰地显示出病灶的具体特征时,只能依靠医
[1]徐辉雄,谢晓燕,吕明德,等.三维超声在介入性诊疗中的应用研究[J].中华超声影像学杂志,2012,16(13):609-613.
[2]徐辉雄,张青萍.超声引导下肝脏肿瘤的射频消融治疗[J].中华超声学杂志,2012,25(7):1235-1237.
[3]董宝玮,梁萍,于晓玲.彩色多普勒在介入性超声中的应用[J].临床腹部超声诊断与介入超声学,2011,9(14):67-68.
[4]W eismann CF,Forstner R,Prokop E,et al.Three-dimensional targeting:anew three-dimensional ultrasound technique to evaluate needle potion during breast biopsy[J].Ultrasound Obstet Gynecol,2012,17(10):745-756.
[5]钱晓芹,夏泽.三维(四维)超声成像技术在介入穿刺术中的应用现状[J].临床超声医学杂志,2007,9(10):614-616.
[6]金鑫,尹永杰,赫荣军.三维超声在肾囊肿穿刺中的应用[J].中国超声诊断杂志,2004,5(2):7-10.
[7]徐辉雄,张青萍,周玉清.肝内血管结构的三维超声成像[J].中华超声影像学杂志,2009,43(2):616-620.
[8]战勇,于晓玲,梁萍,等.常规超声及超声造影在肝脏占位性病变穿刺活检中的应用价值[J].中国医疗设备,2014,(2):164-167.
[9]张青萍,肖先桃,乐桂蓉.三维超声成像的伪像类型及其成因分析[J].中华超声影像学杂志,2012,17(4):223-225.
Effectiveness of App lication of 4D Ultrasound Imaging Technology in Liver and K idney Cyst Puncture
ZOU Song-ping
Department of Physical Diagnosis, Daqing Longnan Hospital, Daqing Heilongjiang 163453, China
Ob jective To explore the effectiveness of application of four-dimensional ultrasound imaging technology in the liver and kidney cyst puncture. Methods A ltogether 27 patients w ith hepatic and renal cysts were selected as the research object and evenly divided into three groups. And the static three-dimensional(3D)imaging, dynam ic three-dimensional(4D)imaging, real-time dynam ic three-dimensional(real-time 4D)imaging technologies were applied in puncture-oriented processes respectively for three groups. Resu lts The 3D ultrasound imaging only could display the post-puncture fixed position of the needle but could not show the entire puncture process. 4D ultrasound imaging showed disadvantages in poor real-time imaging, delayed displaying and long acquisition tim e. Real-time 4D ultrasound imaging could realize real-tim e transm ission of the puncture procedure. The combination of 50% largest transparent model and 50% surface texture as well as the combination of surface imaging mode, multi-planar imaging and image-guided puncture resulted in the best imaging quality. Conc lusion 4D ultrasound imaging technology proved its effectiveness in the liver and kidney cyst puncture, especially the real-time dynam ic imaging technology, which was worth of w idespread use.
ultrasound imaging;static three-dimensional imaging;dynam ic three-dimensional imaging;real-time dynam ic three-dimensional imaging;liver and kidney cyst;intervention puncture
R445.1;R657.3
B
10.3969/j.issn.1674-1633.2015.11.017
1674-1633(2015)11-0056-03
2015-03-24
2015-04-27
作者邮箱:zousongping5539@126.com
猜你喜欢
基层中医药(2021年2期)2021-07-23 01:41:54
广东医科大学学报(2020年4期)2020-08-24 07:11:20
基层中医药(2020年12期)2020-07-22 06:34:52
中华神经创伤外科电子杂志(2020年3期)2020-07-07 05:36:56
临床医药文献杂志(电子版)(2017年11期)2017-05-17 04:48:09
兽医导刊(2016年12期)2016-05-17 03:51:35
中华老年多器官疾病杂志(2016年7期)2016-04-28 08:42:52
兽医导刊(2015年7期)2016-01-04 11:59:56
中国中医药现代远程教育(2014年23期)2014-03-01 04:33:25
护士进修杂志(2013年16期)2013-04-08 00:51:33