基于激光位移传感器可控节约型水龙头的研究
2015-05-30 21:47冯璐梦雷岩岩石珂珂
中国新通信 2015年10期
冯璐梦 雷岩岩 石珂珂


【摘要】提出了一种基于激光位移传感技术的可控节约型水龙头。介绍了激光位移传感器三角位移测量法的原理,分别从水位高度信息的采集、光信号的转换、电信号的处理三个方面分析,最后搭建了基于位移传感器的可控型水龙头体系结构。
【关键词】激光三角法 可控型水龙头 光电转换
微电子技术和传感器已经成为二十一世纪信息社会的重要标志。随着激光传感器的广泛应用及新型光电扫描与光电探测技术的不断提高,工业、农业、家庭、军事、医学等应用领域的传统方法得到了改善。激光传感可控型水龙头将激光位移传感器与电子信号处理技术结合,应用在了水资源节约领域。市场上的传统插卡式热水龙头在使用时难以估定水瓶内的水位,存在着极大的安全隐患和水资源浪费问题。该项日利用激光位移传感技术检测并定位水的高度,经过数字信号处理器将信号反馈到电子电路,自动切断电源。和传统插卡式热水龙头相比,基于激光位移传感器的可控节约型水龙头具有测量精度高、可靠性好、非接触、自动化、安全等突出优点,有极重要的现实和环保意义。在前期的推广中,这项技术先应用于学校水房保温瓶水位的测试。随着后期技术的成熟和市场的开发,可推广向工厂水箱水位测定等更广的领域,发挥更大的经济和应用价值。
一、激光位移传感器的研究现状
现今光电技术的发展、微机的控制、数据的处理及PSD、CCD、四象限位移探测器的改善,使传统的三角测量法有了广泛的应用。具体包括质量的检测、设备的维护、机械和生产自动化、流程和设备的监控等各个领域。
目前在国内,激光位移传感的主要应用包括:对灵敏度和精确度的分析,如何提高其使用范围以及位移、角度、同轴度的非接触测量和校准领域。不过,我国对激光位移传感器的研究仍处于实验阶段。国外很多专家对其做了大量的研究并取得成果。西班牙的研究者在三角激光位移传感器的系统中,发现周围的杂光对测量的精度有影响,并给出了相应的消除方法。目前,国内外有很多这样的产品,广泛地应用在军事技术、航空航天、检测技术等诸多领域。美国研制出红外测温传感器,使其在恶劣的环境下仍能测量出飞行器各部分的温度;城市的交通管理也运用红外光电传感器进行路段事故检测和故障排除的指挥。总体来说,国外传感器的测量范围大,线性度好,分辨率高,稳定性好。国内对激光位移传感器的研究虽不及一些欧美国家,但是却在研究的种类上屡创新奇。
二、激光三角测量技术的原理
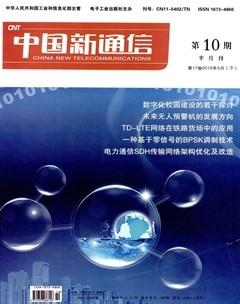
激光三角测量法是指从光源发射一束光线到被测物体表面,在另一方向通过成像观察反射光点的位置,成像位移和实际位移存在一定的换算关系,通过这个关系式可以计算出被测物体表面的实际位移。由于入射光和反射光构成一个三角形光路,因此被称为三角测量法。按照入射光线与被测物表面法线的关系,可分为直射式和斜射式。本项研究采用的是直射式激光三角测量法。
如图l所示,激光发射器发射出一束光线到热水瓶水面形成光斑,光线在表面发生反射后,从另一个方向通过成像透镜,光斑成像在CCD位置传感器上。随着热水瓶水面高度的变化,反射光的角度在发生变化,光斑成像也随之发生位移。设光斑在CCD成像面上相对位移为X,被测表面(即水面高度)的实际位移为X,则两者关系如下式:
在传感器的选择上,本项研究选用的是CCD激光位移传感器。目前应用于激光三角法测距的光接收元件包括:CCD(Charge-c.oupled Device,光电耦合器件)和PSD(Position Sensitive Detector,位置敏感元件)。PSD是基于横向光电效应来实现光能、位置的转换,CCD是一种新型光电转化元件,主要由光敏单元、信号输入单元和信号输出单元组成。CCD以电荷作为信号,实现电荷的存储、转移和检测。与PSD相比,CCD具有轻便、体积小、耗能小、精度高、稳定性好、时效性高等特点。基于上述考虑,最终选定了CCD激光位移传感器。
三、基于激光位移传感器的可控型水龙头系统结构
本项目研究的激光位移传感器硬件系统包括:激光电源、半导体激光器、线阵CCD驱动电路、输出信号的处理系统、单片机测量系统和水龙头阀门控制系统。如图2所示为激光位移传感器的可控型水龙头系统的总框图。
3.1 光源的选择
激光器有很多种:气体激光器、固体激光器、半导体激光器等,气体激光器单色性和方向性好,但体积和重量大,需要外部高压电源,不易安装在小型光学测头上。半导体激光器具有超小型、高效率、电压低、电能转换率高、便于安装等优点。激光光束在传播中存在散射,当测量目标越远,光能量分布不均匀,从而导致误差出现,半导体激光位移传感器可以进行体积小的短距离测量。
3.2 线阵CCD驱动电路
目前,应用于激光三角测距系统的光接受元件主要有两种:CCD——光电耦合器件和PSD——位置敏感元件。本测距系统设计中采用精度高、稳定性好的光电耦合器件CCD作为光电探测器,根据被测物体的移动距离,间接进行测量。
3.3 输出信号的处理系统
图像采集后,CCD输出的信号叠加了较大的干扰噪声,所以要先经过预处理电路后在进行二值化处理。预处理即是将CCD输出进行前置放大后进行滤波处理,放大电路将微弱的信号放大同时干扰的噪声信号也得到了放大。
所以经过低通滤波器将放大电路处理后信号中的高频成分滤除,常用低通滤波器包括:三角滤波法、高斯低通滤波器、中值滤波器等不。最后将输出的信号送入电压比较器进行二值化处理得到稳定的数字信号。最后将数字信号送到单片机系统进行脉冲计数就能得到像点位置信息。系统将计算后的结果显示在显示器界面上。
3.4 水龙头阀门控制系统
在理想条件下,热水瓶的高度为H,由上述系统测出水面高度为X,当x的值接近L时,系统通过反馈电路来控制水龙头的阀门。
四、结束语
激光三角法采用非接触测量,以其实时性强、精度高、对被测物体表面没有特殊要求等优点得以广泛应用,本论文利用直射式激光三角法,对系统的结构参数和所选器件做出了合理的设计和选择。论文的主要工作包括以下几个方面:
(1)通过对激光测距系统在国内外的发展现状研究,并结合本系统情况,确定了本系统的测量原理。
(2)数据采集:令热水瓶的高度是定值H,从光源发射一束激光到被测物体(上升水面)表面,在另一方向通过成像观察反射光点的位置。通过线阵CCD对光电信号进行采集,从而计算出水面到瓶口的距离X。
(3)信号处理将采集到的数据经过滤波放大电路处理,然后将输出的结果由模拟信号转化为数字信号,最后将信号送人单片机系统。
(4)数据结果输出:通过单片机的计算被测物体的位移量,当X-H趋近于零时,将其距离显示在显示器界面上,通过电路控制水龙头阀门的关闭。
后期工作展望:
(1)完善三角法测量原理的理论分析,减少由于测量产生的误差。
(2)改进数据采集和信号处理的电路,推广此技术的应用范围,使其可以应用于未知高度的热水瓶。