粒子滤波算法综述
2015-05-30 10:48李孟敏
中国新通信 2015年10期
李孟敏
【摘要】对粒子滤波算法的原理、发展历史以及应用领域进行综述,首先针对非线性非高斯系统的状态滤波问题阐述粒子滤波的原理,而后讨论粒子滤波算法存在的主要问题和改进手段,最后阐明其在多个研究领域中的应用现状。
【关键字】非线性滤波 概率密度 重采样 粒子退化
一、引言
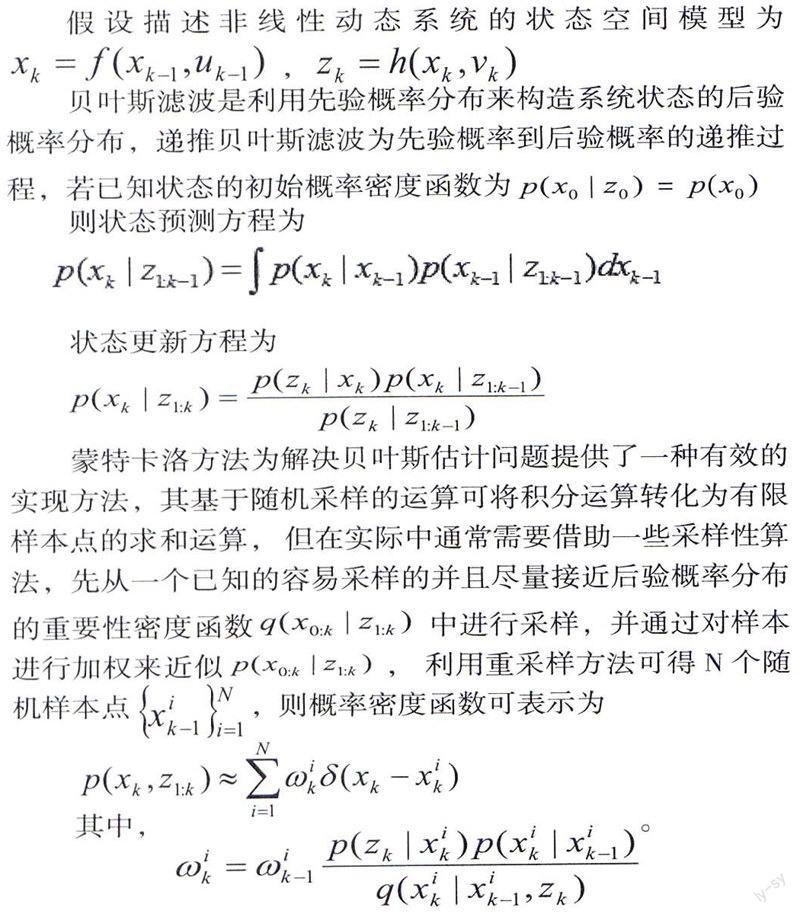
粒子滤波(PF)是一种在处理非线性非高斯系统状态估计问题时具有较好估计效果的方法,其原理是通过非参数蒙特卡洛方法实现贝叶斯滤波。其最早起源于Hammersley等人在20实际50年代末提出的顺序重要性采样(SIS)滤波思想。
但由于上述方法存在严重的样本权值退化从而导致的粒子数匮乏现象,直到1993年Gordon等人将重采样技术引入蒙特卡洛重要性采样过程,提出一种Bootstrap滤波方法,从而奠定了粒子滤波算法的基础。
二、基本粒子滤波算法
三、粒子滤波算法存在的主要问题及改进
对于SIS算法来说,容易出现粒子的退化问题,目前存在的诸多对SIS算法的改进中,能够降低该现象影响的有效方法是选择合适的重要性函数和采用重采样方法。
针对状态空间模型的改进算法,如辅助变量粒子滤波算法(APF),局部线性化方法,代表的算法主要有EKF,UKF等。针对重采样改进方法,文献通过将遗传算法和进化算法引入粒子滤波算法中,增加重采样过程中粒子的多样性。
然APF算法在过程噪声较小时,可获得比标准粒子滤波更高的滤波精度,在过程噪声较大时,其效果则大大降低。采用局部线性化的方法EKF,UKF都是针对非线性系统的线性卡尔曼滤波方法的变形和改进,因此受到线性卡尔曼滤波算法的条件制约,而对于非高斯分布的状态模型,其滤波性能变差。
将遗传算法和进化算法与粒子滤波结合的改进粒子滤波算法,虽取得了较好的滤波效果,然而是以消耗过多计算资源为代价的。
四、粒子滤波的应用
4.1 目标跟踪
对目标进行定位和跟踪是典型的动态系统状态估计问题,在诸如纯角度跟踪的运动模型中,采用粒子滤波方法进行实现目标跟踪已获得了较好的跟踪精度,文献研究了多目标跟踪与数据融合问题,文献给出了基于粒子滤波的群目标跟踪算法。
4.2 计算机视觉
近年来,通过序列图像对感兴趣的区域进行持续跟踪问题引起人们广泛关注,Isard M率先将粒子滤波算法引用了计算机视觉领域,Maccormick J较系统的总结了粒子滤波方法在计算机视觉中的应用,从中可了解粒子滤波算法在该领域中的应用成果和发展趋势。
五、结束语
本文对粒子滤波算法的推导过程以及其存在的问题进行分析和研究,比较了多种改进粒子滤波算法论述不同改进算法的特点和优缺点。
猜你喜欢
测控技术(2018年10期)2018-11-25
浙江工业大学学报(2017年5期)2018-01-22
北京航空航天大学学报(2017年9期)2017-12-18
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27
电子设计工程(2014年6期)2014-02-27
物理与工程(2014年4期)2014-02-27