机器人主动自组技术研究
2015-05-30 07:28:13付胡代杨松赵宪女李薇薇
科技创新与应用 2015年29期
付胡代 杨松 赵宪女 李薇薇

摘 要:文章讨论了使用组装代理,也就是机器人的主动自组技术方法。它展示了这样一种机器人的群组机制,在群组中,机器人只需要通过很简单的信息通讯就能够编程产生整体或局部的特定结构,在生成的过程中可能会损失一些组件或结构。这种组装代理只有很小的记忆和通讯要求,而且只在接触时发生通讯。
关键词:机器人;群组;主动自组
1 概述
自组技术产生的人造结构大都是对称结构的,可是绝大多数应用都要使用非对称结构。比如说,一个典型的自装配的单层结构只能均匀地覆盖一个给定的平面。另外,被动自装配的组件是“硬件编程”的,换句话说,这些组件本身必须被放置在建立系统所需的正确连接地点。主动自组技术组件在通常意义上是可以编程控制的,这也是其优于被动自组组件的主要方面。
2 对组装代理的要求
为了实现以上的一系列算法,每个组装代理都必须有以下的能力:(1)储存和执行一个有限的状态机;(2)与结构中邻接的组装代理交换当前状态;(3)接受邻接的组装代理发来的信息并将其转发至其他若干个邻接代理;(4)维持一个记录转发次数的计数器;(5)在物理层面上附加到其他组装代理上;(6)执行周期性行动;(7)实现随机路线移动。
3 通讯
当组装代理拥有了与邻接代理通讯的能力之后,群组又拥有了重要的新能力。某一个组装代理的当前状态总能够通过通讯与邻接的代理进行交互。另外,组装代理可以发送信息。这些信息被定义为非状态信息从一个代理发送到另一个。本研究中所使用的信息是一个一系列预定义的计数值的子集,但这些包含了数据域的信息是可以得到的。
信息根据独立的组装代理的通讯状态而不同,代理不会向所有方向发送同样的信息。组装代理通常会将信息发送到与源代理方向相反的邻接代理。这种机制使信息有了方向性,这是文章讨论的技术所必须的。
4 实验
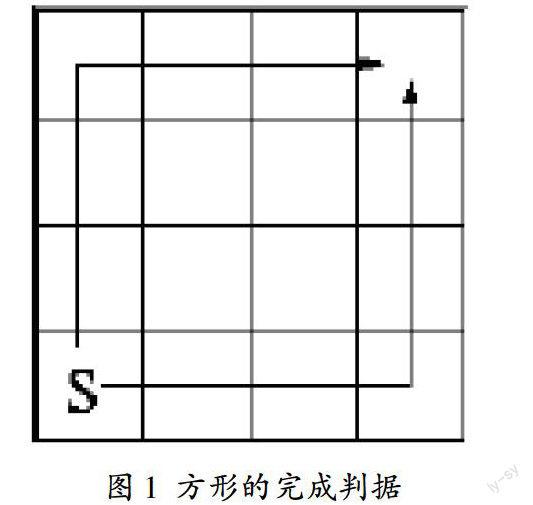
文章建立并测试了以下建立基本形的状态机:方形、矩形、近似的三角形。每一个基本形的状态机的大小取决于所生成的形状的大小。分别如图1、图2和图3所示。
生成方形的状态机从一个角上的种子开始生成整个结构。如图1所示,种子所在的方形标有“S”标记。种子生成垂直的两行组装代理,行的长度由在代理间传递的消息携带的计数值控制。
矩形从一个末端的种子开始生成整个结构。种子产生单独的一排,这排代理构成矩形较长的一排。一旦这一排就位,代理就一層一层地附着在上面直到矩形达到预定宽度。宽度是由从中间排的组装代理发出的垂直于长轴的消息度量的,其方法是检查消息携带的跳转计数。每一层都是从种子末端开始的,所以最后两个加入结构的代理将会是离种子最远的两个角点。
三角形从直角顶点开始生成整个结构。像方形一样,一个三角形由构造网状的L形生成,但是当构成三角形每个的臂时候每个L形比其邻接的L少两个组装代理,而不像矩形那样只少一个。消息的传递方式和方形的解决方案是一样的;区别仅在于当方向改变的时候跳转计数的编辑方法不同。
5 结束语
简单机器人的集群可以通过编程使之自动组成目标结构,例如给定形状之间的连线,包括矩形、三角形。组合图形等在内的基本形。这些机器人拥有很小的内存、简单的执行机构,还可以在发生物理接触的时候用非常有限的消息进行通讯。因此解决了通过主动自组技术生成复杂结构的可能性,而这正是适合于批量生产的本质上的并行过程。
参考文献
[1]朱顺利.基于行为的自主清扫机器人的研究[D].江西理工大学,2008.
[2]王醒策.基于强化学习的多机器人编队方法研究[D].哈尔滨工程大学,2002.
[3]陶恒铭.六自由度工业机器人运动分析与控制技术的研究[D].合肥工业大学,2014.
[4]苗登雨.重载搬运机器人结构设计与动态性能分析优化[D].合肥工业大学,2014.
作者简介:付胡代(1977-),女,汉族,吉林人,硕士,研究方向:机电工程与智能检测。
猜你喜欢
金桥(2019年10期)2019-08-13 07:15:16
电子测试(2018年14期)2018-09-26 06:04:10
水利技术监督(2017年6期)2017-12-19 13:28:15
山西大同大学学报(自然科学版)(2016年6期)2016-01-30 08:29:42
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:54:51
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19
计算机工程与设计(2011年7期)2011-09-07 10:16:54