遗传算法优化模糊控制器的研究
2015-05-30 01:21:32李冰
科技创新与应用 2015年29期
李冰
摘 要:在工业生产中,经验丰富的工人可以通过自己的方法去稳定控制一个复杂的系统。当控制系统的数学模型不精确时,可以使用智能的模糊控制器规划出合理的方法,相比传统的控制理论有更大的优势,因此模糊控制更适合应用在工控领域中。文章对遗传算法优化模糊控制器进行了研究,以供相关人士参考和借鉴。
关键词:遗传算法;优化;模糊控制器;研究
1 概述
随着技术的进步,模糊控制的研究越来越热门,并且广泛应用在工业中,与此同时也发现了它的一些缺点:在确立模糊化的方法时,缺乏一套整体的方法,主要是根据实践经验,在设计上有较大的主观性和随意性,而且控制规则的确定有时并不简单,因为规则确定之后无法自适应调整;模糊控制器中未加入积分环节,所以稳态精度较低。因此,将智能算法融入到模糊控制的设计中,提高搜索速度,达到优化控制系统的效果。
2 改进算法
2.1 初始种群的生成
初始种群的生成对遗传算法有很重要的影响,初始种群的的优劣直接影响到算法的收敛速度,良好的初始种群中包含更多的优秀个体、优秀基因,能令算法较快地收敛,而不好的初始种群会导致算法计算量大,容易陷入局部最优。在一般的情况下,经常使用随机产生初始种群的方法,这种方法随机性比较强,产生的初始种群时好时坏,有时候也盲目地扩大了搜索空间,不利于算法的收敛,为了提高搜索效率,一般情况下用随机产生并加入一些约束条件的方法,所以文章引用稳态繁殖的思想,将模糊控制规则作为母体,按照一定的概率产生新个体来组成初始种群。
2.2 改进交叉算子
交叉操作是将两个父代个体的部分基因相互替换来重新组合成新个体,从而有助于产生新的优良个体的方法。对于十进制编码方式,在多点交叉的基础上,改进交叉方法:首先随机确定一个基因座,把距离这个基因位为偶数的所有基因选择为待交叉位,将该位置父代个体与子代个体基因值作差,如果差值为1或者-1则进行交叉操作,这样交叉是为了预防极不合理的个体产生,避免控制系统由于规则的跳跃出现的剧烈振荡。
2.3 改进变异算子
算法流程:
Step1:随机生成初始种群P(k)。
Step2:计算种群中每一个个体的适应度值,并按照由大到小的顺序进行排列。
Step3:按照上述改进的选择、交叉、变异算子进行遗传操作。
Step4:判断是否需要引入新个体,若需要则随机生成新个体加入到种群中,替换掉适应度值低的个体,若不需要则继续进行Step5。
Step5:判断是否满足进化终止规则,若满足条件则输出最优个体,结束计算,若不满足条件则转到step2继续运行。
3 仿真分析
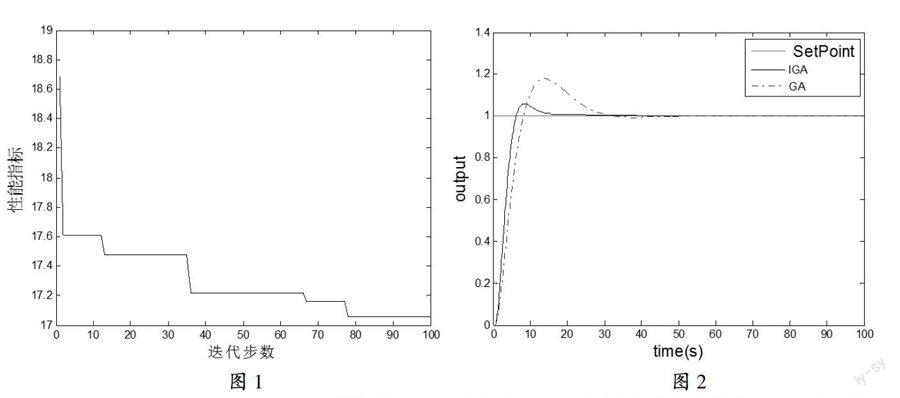
改进算法的模糊控制器的参数寻优曲线如图1所示,改进的双种群遗传算法在第78代得到最优解,最优目标函数值BestJ=17.0534,优化后的最优个体为{1.4 1.2 0.6 7.12 5.36 0.5 7766564 7656534 7565542 6545422 6444341 5433231 5322121}。从寻优曲线可以看出,改进遗传算法的收敛速度比基本遗传算法的收敛速度快。
将搜索到的参数及控制规则最优值应用在模糊控制器中,与标准遗传算法作对比试验,图2中实线表示改进遗传算法优化的模糊控制器,虚线表示标准遗传算法优化的模糊控制器。从图2中改进的遗传算法与标准遗传算法相比较,改进算法的控制效果有明显的提高。
4 结束语
文章改进了遗传算法,采用稳态繁殖的思想生成初始种群,改进交叉、变异算子,在遗传算法后期,种群中个体逐渐趋于相似时,引入随机个体来保持种群的多样性,并对算法进行收敛性分析,将改进算法应用于模糊控制器的优化,与标准遗传算法对比,控制效果较好。
参考文献
[1]孙增沂.智能控制理论与技术[M].北京:清华大学出版社,1997:26-32.
[2]Li H, Jing X, Lam H. Fuzzy Sampled-Data Control for Uncertain Vehicle Suspension Systems[J].Cybernetics IEEE Transactions on,2014,44(7):1111-1126.
[3]Allouche M, Chaabane M, Souissi M.State Feedback Tracking Control for Indirect Field-oriented Induction Motor Using Fuzzy Approach[J].International Journal of Automation & Computing,2013,10(2):99-110.
[4]Verbruggen H B, Zimmermann H J, Babuska R. Fuzzy Algorithms for Control[J]. International series in intelligent technologies,2011.
[5]丁建立,陳增强,袁著祉.遗传算法与蚂蚁算法的融合[J].计算机研究与发展,2003,40(9):1351-1356.
[6]张景元.模糊控制规则优化方法研究[J].计算机工程与设计,2005,26(11):2917-2919.
猜你喜欢
房地产导刊(2022年5期)2022-06-01 06:20:14
体育科技文献通报(2022年3期)2022-05-23 13:46:54
辽金历史与考古(2021年0期)2021-07-29 01:06:54
建材发展导向(2021年12期)2021-07-22 08:06:48
建材发展导向(2021年7期)2021-07-16 07:07:52
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26 07:43:48
科技传播(2019年22期)2020-01-14 03:06:54
民用飞机设计与研究(2019年4期)2019-05-21 07:21:24
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32