血管介入手术三维导航仿真软件设计
2015-05-30 10:48:04马策汤汶万韬阮朱耀麟武桐
软件工程 2015年4期
马策 汤汶 万韬阮 朱耀麟 武桐
摘 要:本文在虚拟内窥镜技术的基础上,提出一种方法进行介入手术的三维导航仿真。该方法使用了两个三维绘制窗口分别读入体绘制和面绘制的血管模型。含有体绘制的血管模型的三维绘制窗口进行标志物移动的实时三维导航;含有面绘制的血管模型的三维绘制窗口进行标志物经过路径的显示和血管的内窥观察。通过两种绘制窗口同步仿真,来达到了对介入手术三维导航的目的。
关键词:血管;介入手术;三维导航;仿真;心脏支架
中图分类号:TP391 文献标识码:A
Abstract:In this project a new method is also proposed to simulate the interventional medical procedural simulation based on the virtual endoscopy system developed in this project.The simulation of the intervention is realized by adding virtual markers of interventional catheter and the navigation of the medical devices is modeled through synchronous presenting in two models both in volume rendering and surface rendering.It can be shown that intravascular navigations and virtual markers positions are accurately represented and visualised.
Keywords:vessel;interventional operation;3D navigation;simulation;heart stents
1 引言(Introduction)
随着虚拟内窥镜技术的成熟,虚拟内窥镜逐渐替代传统的侵入式内窥镜,以此避免对人体上侵入损伤[1-4]。
本章在虚拟内窥镜技术的基础上,加入介入手术导管的虚拟标志,达到对介入手术进行三维导航仿真的目的。在面绘制的血管模型内部进行内窥的同时,含有体绘制的血管模型的三维绘制窗口进行标志物移动的实时三维导航,从而既能够从宏观的角度来观察虚拟标志物在人体内的位置,又能够从微观角度观察虚拟标志物在人体血管内部的状况。
2 仿真软件平台的搭建(Building of simulation
software)
该介入手术的三维导航仿真软件使用MITK(Medical Imaging Interaction Toolkit)作为开发框架。对血管的三维面绘制以及体绘制模型进行分别读取;通过使用介入手术路径采集插件进行虚拟导管的路径信息采集;最终通过两个含有体绘制的血管模型的三维绘制窗口进行标志物移动的实时三维导航;含有面绘制的血管模型的三维绘制窗口进行标志物经过路径的显示和血管的内窥观察。
2.1 介入手术路径数据采集插件
在对介入手术进行三维导航仿真过程中,需要先对介入手术中导管移动的坐标信息进行采集。本文的手术是通过在虚拟内窥镜的基础上加入介入导管的虚拟标志物进行仿真实现的。
本文创建了介入手术路径数据采集(Intervention)插件用于路径信息的采集。该插件通过用户交互界面对三维绘制窗口中的血管模型内部进行实施移动操作,并将每一次的移动坐标信息进行保存,以构成一次完整的介入手术的路径信息。
介入手术路径数据采集插件的具体实现方法是通过在三维绘制窗口中创建一个虚拟的标志物(比如一个白色的圆锥)来表示代替现实世界中的介入导管。通过软件的交互界面对该虚拟标志物的进行移动操作,然后输出虚拟标志物的移动位置给外部的介入导管,以此来指导介入导管在人体血管的移动并输出位置信息。
2.2 介入手术三维导航仿真插件
介入手术三维导航仿真插件在MITK提供的导航数据播放(Navigation Data Player)插件的基础上改进完成,导航数据播放插件能够将可扩展标记语言(.xml)文件进行读取,并将文件中所记录的介入导管坐标信息和相应的时间信息提取出来,对介入手术进行回顾重放。
为了实现在血管内部进行介入手术过程的虚拟现实仿真,对该插件进行功能扩展:
(1)将三维绘制窗口的视角对虚拟介入导管进行实时跟踪,并通过滑动条进行对照相机和虚拟标志物位置关系的调节。该功能通过点击“CameraTrace”按钮进行激活,点击“GeneralMode”则取消。
(2)通过在程序对文件内记录的介入导管坐标信息进行提取的时,将该信息的数值赋值给一个三维数组;并通过滑动条进行照相机位置的微调,来实现照相机的实时跟踪。通过滑动条和浮点数值“factor”进行系数的调节,即照相机在三维绘制窗口的实时位置为:;;。
其中,Cx、Cy、Cz为照相机的当前位置,Rx、Ry、Rz为滑动条的当前值,F为浮点数值“Factor”系数,Vx、Vy、Vz为虚拟标志物的当前位置。滑动条的数值区间为—100至100,当“Factor”系数为1.00时,三维窗口中照相机移动的区间对应为—20mm至20mm。
3 心脏支架手术三维导航仿真实例(Instantiate of heart stents 3D navigation simulation)
心脏支架手术是针对心脏冠状动脉堵塞引发的心肌缺血、心肌梗塞而进行对冠状动脉进行扩张的治疗手术。该手术通过在人体大腿内侧切开口,将支架导管送入动脉中,沿着下肢动脉向上移动至主动脉弓,然后进如冠状动脉的狭窄点或堵塞点,然后进行支架撑开,打通血管,让血液流通。
根据该手术的过程进行心脏支架手术三维导航的仿真,该仿真针对支架在胸部位置的移动进行演示,首先对路径的坐标信息进行提取,然后根据提取到的坐标信息进行仿真动画演示。
3.1 支架介入路径数据采集
该实验数据采集针对已有的心血管三维模型进行路径信息提取。采用介入手术路径数据采集插件进行坐标信息提取,该路径从胸部的连接下肢动脉开始向上,至主动脉弓开始转向下进入主动脉弓与右心房连接处,在连接处找到左冠状动脉,从入口进入,最终抵达目标地——冠状动脉内部。
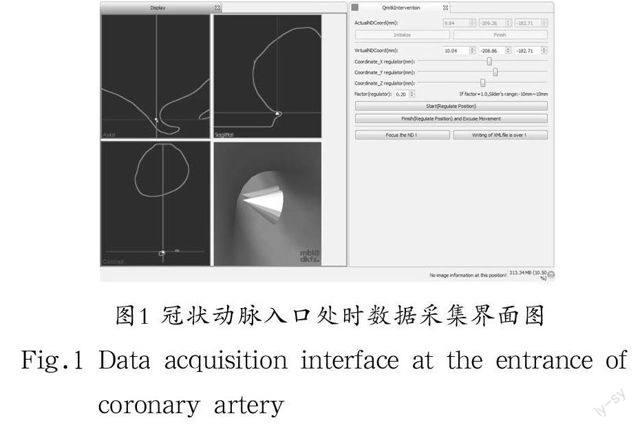
首先对胸部的连接下肢动脉中心的最下端的坐标输入介入手术路径数据采集插件,初始化完成以后,按照支架介入的路径进行移动,如图1所示,虚拟标志物正要进入冠状动脉。
数据采集完成后会生成XML文件。文件中记录了时间、虚拟标志物序号以及时间相对的三维坐标。时间间隔为0.1秒,这个时间间隔虽然只能让动画帧数达到10帧,但坐标间距小,基本上可以达到动画效果。
3.2 心脏支架手术三维导航仿真演示
本仿真实现的心脏支架手术三维导航仿真分别从宏观和微观两种方式进行演示。
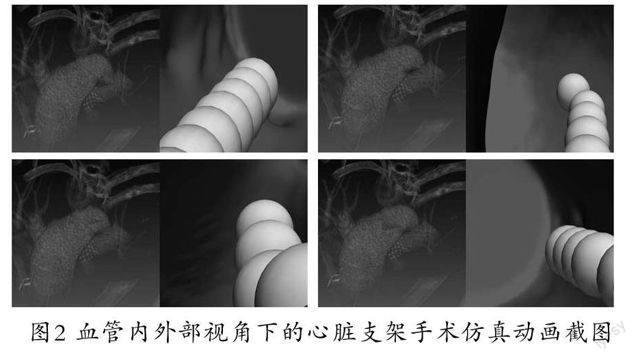
血管内外部的仿真演示:通过对已有的心肺血管三维体绘制模型和虚拟标志物进行在三维绘制窗口的联合显示,读取心脏支架手术的路径信息,达到对支架手术的导管在人体血管中移动情况的宏观演示以及在血管内部的微观情况。如图2所示。
通过仿真表明,血管外部视角的心脏支架手术仿真能够对虚拟标志物与介入路径上的血管的位置关系进行良好的显示,而血管内部视角下的心脏支架手术仿真则能够对血管内部状况进行良好的显示。
通过将两种仿真方式同时进行演示,不仅能够将虚拟标志物与人体组织的位置关系进行良好的显示,而且能够使观察者在清楚虚拟标志物在血管内部移动时的支架手术移动的位置所对应的血管情况。
4 结论(Conclusion)
该软件通过两种方式的同步仿真,能够在血管外部,从宏观角度观察到虚拟标志物在人体内的位置,而且能够从血管内部的微观角度对虚拟标志物在人体血管内部的状况进行同步观察。最终仿真结果表明了该仿真软件平台基本上实现了对介入手术的三维导航的仿真功能,达到预期效果。
参考文献(References)
[1] 杜阿安,等.心脏三维虚拟内窥镜系统[J].生物医学工程学杂志,2012,05:974-982.
[2] 方驰华,等.腹腔镜手术的虚拟仿真研究[J].中国内镜杂志,2009,04:337-340.
[3] 孟晓林,等.基于VTK的医学虚拟内窥镜系统的研究[J].医疗卫生装备,2009,10:8-9;14.
[4] 申皓,唐泽圣,唐龙.分支结构中的虚拟内窥技术[J].系统仿真学报,2004,11:2456-2458;2466.
作者简介:
马 策(1989-),男,硕士生.研究领域:虚拟现实的医学应用.
汤 汶(1965-),女,博士,教授.研究领域:虚拟现实与增强现实.
万韬阮(1960-),男,博士,教授.研究领域:虚拟现实与增强现实.
朱耀麟(1977-),男,博士,副教授.研究领域:信息与通信工程.
武 桐(1982-),女,硕士,讲师.研究领域:嵌入式系统.
猜你喜欢
西江月(2018年5期)2018-06-08 05:47:42
海峡姐妹(2017年12期)2018-01-31 02:12:34
人大建设(2017年4期)2017-07-21 11:03:19
海峡姐妹(2017年5期)2017-06-05 08:53:17
科技资讯(2016年18期)2016-11-15 20:09:22
数字技术与应用(2016年9期)2016-11-09 23:25:33
数字技术与应用(2016年9期)2016-11-09 22:09:07
科技视界(2016年18期)2016-11-03 21:44:44
科技视界(2016年18期)2016-11-03 20:31:49
企业导报(2016年6期)2016-04-21 17:56:19