
基于亮度信息的红外行人检测
2015-05-30 10:48:04王路杰徐向华
计算机时代 2015年7期
王路杰 徐向华
摘 要: 红外图像中的行人具备边缘和亮度两个显著特征信息。为了能够充分利用这两种信息,在亮度直方图特征基础上,提出了一种不同区间大小的亮度直方图特征。通过统计分析红外图像中行人各部件对应的亮度区间信息,确定映射规则,从而构建不同区间大小的亮度直方图,然后通过与梯度方向直方图特征相结合,并用于Adaboost模型训练。该方法提高了行人检测系统的检测率。
关键词: 红外图像; 行人检测; 梯度方向直方图; 亮度直方图; Adaboost
中图分类号:TP391.4 文献标志码:A 文章编号:1006-8228(2015)07-01-03
Pedestrian detection based on infrared intensity information
Wang Lujie, Xu Xianghua
(Hangzhou Dianzi University, Zhejiang Provincial Key Lab of Data Storage and Transmission Technology, Hangzhou, Zhejiang 310037, China)
Abstract: The pedestrian in the infrared images has two significant features that are edge and intensity. In order to take full advantage of the two information, based on the HOI(Histogram of Intensity) feature, the DBHOI(Different Bin Histogram of Intensity) feature is proposed. Through the statistics and analysis of the intensity information of pedestrian in the infrared image, the DBHOI descriptor determines the mapping rules, and then constructs an intensity histogram with different size of bins. Combined with the HOG(Histogram of Oriented Gradient) descriptor, the DBHOI descriptor is used to train Adaboost model. This method improves the detection rate of the pedestrian detection system.
Key words: infrared images; pedestrian detection; histogram of oriented gradient; histogram of intensity; Adaboost
0 引言
近些年来,基于视觉的行人检测一直是计算机视觉的一个研究热点[1-2]。基于红外成像的行人检测方法对不同环境下的行人检测具有一定的适应性。目前,红外行人检测技术[3-5]主要基于机器学习的方法,其中主要涉及特征提取和分类器训练。在特征提取阶段,由于红外图像中的行人本身具有两个明显的信息:边缘信息和亮度信息,因此大多数的特征构造是依据这两个信息进行的,比如梯度方向直方图(Histogram of Oriented Gradient,HOG)[6]、亮度直方图特征(Histogram of Intensity,HOI)[7]等。为了消除特征单一带来的误检,将HOG与HOI进行特征融合[7]是一种有效方法。HOI特征描述红外图像中的亮度信息,但是没有利用行人亮度信息分布相对稳定的特点。本文通过统计红外图像中行人各部件对应的亮度区间信息,从而确定映射规则,构建不同区间大小的亮度直方图(Different Bin Histogram of Intensity,DBHOI)特征。然后将该特征与HOG特征相结合构成一个特征描述符,进而从多个角度去刻画行人与背景之间的区别。本文基于Adaboost学习算法[8]进行模型训练,最后利用滑窗扫描法进行行人检测。
1 特征提取
检测对象——行人包含两个明显的信息:边缘和亮度。其中HOG特征很好地提取了图像中的边缘信息。因为人体温度的变化是在一定范围内,所以行人的亮度信息也就相对稳定。目前,HOI特征描述符[7]是一个对亮度信息描述较好的特征。
1.1 HOI描述符
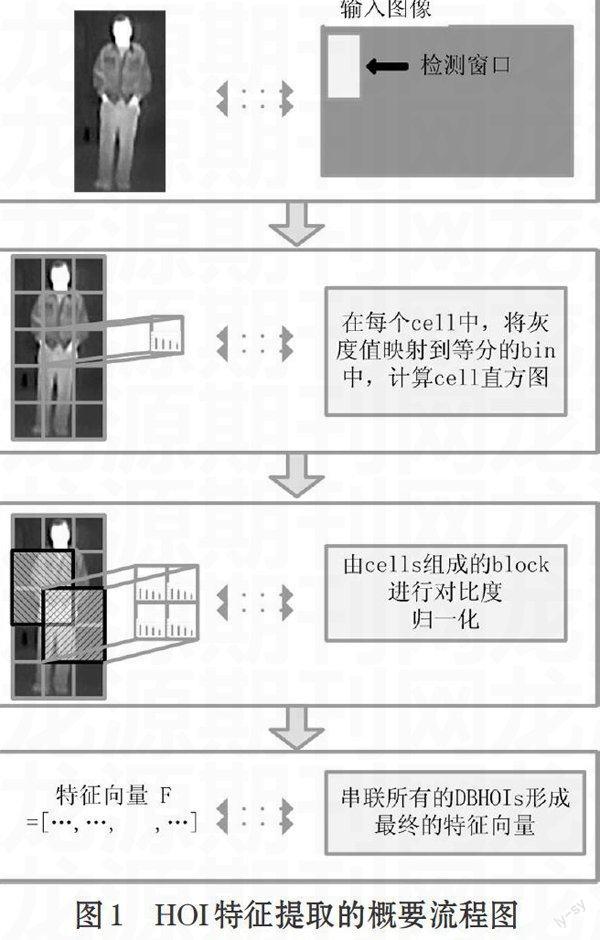
HOI特征是一个描述亮度信息的特征。它通过对图像中的亮度信息进行区域高密度的、重叠的编码,以此来表征行人与背景之间的区别。HOI特征的构造过程大致如图1所示。
⑴ 将图像划分为多个局部区域,并构建HOI。首先将图像窗口分割成一个个小的区域,这些小区域叫做“cell”。对于每一个cell,计算cell中每一个像素的灰度值,形成一个局部的一维亮度直方图。在每一个亮度直方图中,将灰度值映射到不同区间,并将灰度值的大小作为权重值映射到该区间中。灰度区间的划分由实验给出,默认情况下将灰度值范围划分为6等份。
⑵ 进行块(Block)内的归一化。通过块区域重叠的方式,使得每一个独立的cell的信息可以在几个不同的块中共享,然后对块区域内的直方图进行归一化。通过块归一化处理,提高HOI对行人描述的鲁棒性。
⑶ 串联每一个块中形成的HOI特征向量。
图1 HOI特征提取的概要流程图
因为HOI特征对图像中的局部亮度信息进行了编码,所以该特征与简单的亮度灰度值相比具有更强的描述能力。
1.2 DBHOI描述符
HOI特征较好地对红外图像中的亮度信息进行了编码,但也存在缺陷。它只是将灰度值区间进行均等划分,并没有考虑行人所具有的刚性特征及身体各部件热辐射的相对稳定性。因为热辐射的相对稳定性,使行人各部件形成的亮度具有显著的特征,即头部比身体其他部件的亮度都要大,且亮度灰度值非常高。若构造的特征描述符能够有效的表达该信息,那么将会有效的提高特征描述能力。
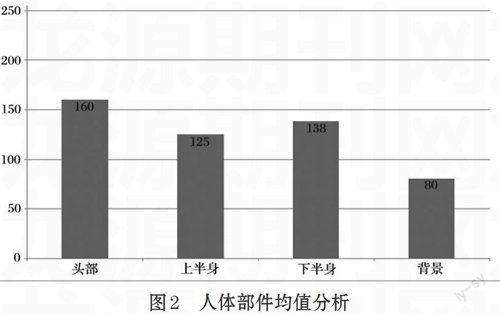
为了确定如何划分灰度值到多个区间中,我们利用四组图像集合,且所有的图像来自训练样本集。根据样本集的大小随机抽取数张并截取人体部件:头部、肢体上半身、肢体下半身。根据这些图像的集合,统计出每一个人体部件所具有的相对稳定的灰度均值,具体分布如图2所示。
图2 人体部件均值分析
DBHOI的提取过程与HOI的提取过程(图1)类似,不同之处在于第二步中灰度值的映射。根据图2的实验结果,我们将灰度值映射到各个不同的区间中。另外根据经验性的观察,行人部件中头部的亮度信息特别明显,为了获取该信息划分了一个区间[230,255],其他的区间分别是[0,103],[103,149],[149,230]。经过这样的区间划分,得到亮度直方图特征具有对行人更强的描述能力。
DBHOI特征描述符的提取过程与HOI的提取过程类似,它不仅保留了原HOI特征描述符所具有的优点,而且在组织亮度信息分布时更好的区分出行人与背景。根据背景与行人的亮度分布信息特点,我们进行不同区间大小的划分,使得行人与非行人在亮度信息上的差异更加明显。当环境产生变化时,使用DBHOI特征来描述行人依然具有稳定性,从而提高了行人检测的鲁棒性。
2 基于Adaboost的分类器
为了得到一个具有强分类能力的分类器,我们采用了基于Adaboost学习算法的级联分类器[8]。一个Adaboost分类器一般有如下形式:
⑴
其中αt为每个弱分类器对应的权重值,ht为弱分类器,T为迭代次数。
在训练前,每一个样本被设置一个非负的权重值。在每一次迭代中被错分样本的权重值将会被更新,会被设置一个更大的值,在下一次迭代的过程将会更加重视这些样本。
本文实验的训练数据基于17900个样本,包括正样本和负样本,因此每个样本的初始权重值将会被设置为1/17900。设置的迭代次数分别为32、128、512、2048。首先训练一个包含32个弱分类器的强分类器,然后用这个分类器进行样本分类,只有通过了该分类器正确分类的样本才进行下一个分类器训练的训练样本集。重复上述过程进行迭代,直至产生每层的强分类器。
3 性能评估
为了分析DBHOI特征的描述能力,该特征与HOI特征进行了比较。实验的硬件环境为Intel Core i5@3.1GHz,4G内存,仿真工具为Matlab R2012a。
3.1 红外行人检测样本集
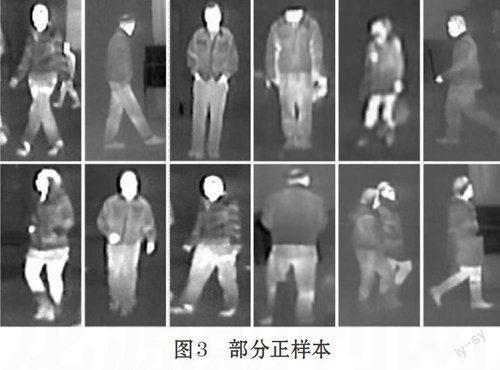
图3 部分正样本
利用被动红外摄像机拍摄了大量实际车载场景下的红外图像,并根据Caltech样本库的样本制作标准,建立一个完善的红外行人样本库。训练集包括1170个正样本和16730个负样本;测试集包括100张包含行人的图像,160张不包含行人的图像。图3和图4是随机抽取的正负样本图像。
图4 部分负样本
3.2 实验结果
为了说明在车载红外行人检测中,亮度信息对最终的分类算法性能的影响,本文以HOG为基础特征,分析了在增加和不增加亮度信息特征——DBHOI特征描述符的两种不同情况下整个行人检测系统的性能。除此之外,为了说明HOI特征与DBHOI特征,以及两者在描述能力上的差异,本实验构造HOI特征、DBHOI特征,然后结合描述边缘信息的HOG特征,构成不同的积分通道特征,并比较了两者之间的性能差异。
图5说明了在没有亮度信息的情况下,行人检测系统的检测率约为35%,而在增加了描述亮度信息的DBHOI特征描述符后,检测率达到了42%,使得整个系统的性能提升了7%。
图5 有无亮度信息图
图6表示在红外数据集上,用检测率(=1-missing rate)VS FPPI作为评价标准,对不同亮度信息提取方法的比较。由DBHOI与HOG构成的特征达到了42%检测率,而HOI只有37%。改进的DBHOI特征相对于原来的HOI特征提升了大约5%的性能。
图7中a(1)、b(1)与a(2)、b(2)分别是HOI特征与DBHOI特征的检测结果。可以看出,DBHOI特征检测到图像中更多的行人,当行人与相机的检测距离增大时,DBHOI特征提取到更多的信息。从b(1)组与b(2)组的最后一张图像中可以看出,均匀划分灰度的HOI特征没能很好的区分其他发热物体所行人的亮度如汽车的轮子,而DBHOI特征描述了这种区别。
图6 亮度信息进行不同构造方式
图7 DBHOI特征与HOI特征效果比较
4 结束语
本文提出了一个完整的针对红外车载场景下的行人检测方法。其主要的贡献在于,针对红外图像中行人的特点,详细分析了有无亮度信息以及不同亮度信息构造方式对最终行人检测性能的影响。并改进了HOI特征描述符存在的不足之处,提出了DBHOI描述符。实验表明,红外图像中的亮度信息是一个非常重要的信息,并且DBHOI特征的构造方式提高了行人检测系统的性能。
参考文献:
[1] Dollar P, Wojek C, Schiele B. Pedestrian detection: An evaluation
of the state of the art[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2012.34(4):743-761
[2] O'Malley R, Glavin M, Jones E. A review of automotive infrared
pedestrian detection techniques. Signals and Systems Conference[C]. Galway:IEEE, R,2008:168-173
[3] Olmeda D, Premebida C, Nunes U. Pedestrian detection in far
infrared images[J]. Integrated Computer-Aided Engineering,2013.20(4):347-360
[4] Dollár P, Appel R, Belongie S. Fast feature pyramids for object
detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2014.36(8):1532-1545
[5] Brehar R, Vancea C, Nedevschi S. Pedestrian detection in infrared
images using aggregated channel features. 2014 IEEE International Conference on Intelligent Computer Communication and Processing (ICCP)[C]. Cluj Napoca: IEEE, R,2014:127-132
[6] Dalal N, Triggs B. Histograms of oriented gradients for human
detection. IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR) [C]. San Diego, CA, USA:IEEE 2005:886-893
[7] 朱聪聪,项志宇.基于梯度方向和强度直方图的红外行人检测[J].
Computer Engineering,2014.40(12).195-204
[8] Viola P, Jones M J. Robust real-time face detection[J].
International journal of computer vision,2004.57(2):137-154
