基于Laplace的显微物体三维形貌快速重构
2015-05-30 00:44:59胡致杰何晓昀
软件工程 2015年9期
胡致杰 何晓昀

摘 要:显微物体表面三维形貌观测与分析在工业、医学、艺术、计算机等领域具有越来越重要的应用价值,也发挥着越来越重要的作用。该文以能够快速、廉价、非接触地重构出显微物体三维形貌为目标,提出一种基于改进的Laplace算子值进行图像的聚焦评价、高度测量和三维重构的方法,该方法通过计算每个像素点的改进Laplace值,帮助用户快速实现显微物体的三维形貌重构,将显微物体的形貌观测和分析从二维扩展到三维。大量的实验结果和用户体验反馈信息进一步验证了该方法的有效性和实用性。
关键词:Laplace算子;显微物体;聚焦评价;聚焦高度;三维重构
中图分类号:TP391.4 文献标识码:A
1 引言(Introduction)
由于社会的发展,越来越多行业对微观物体表面形貌观测的要求也越来越高,以获取微观物体更多的表面形貌信息,比如工业分析、医学分析等[1]。但是,由于普通显微镜的固有特性,只有聚焦区域的图像成像清晰,非聚焦区域的图像成像模糊。因此普通显微镜无法实现在同一景深中对显微物体表面形貌的全聚焦,更不能重构其三维形貌。
随着计算机图像处理技术的快速发展,在普通显微镜下实现显微物体形貌的三维重构已成为可能,普通显微镜下的多聚焦图像经过相应变换,可重构出微观物体的三维形貌[2,3]。
2 三维形貌重构的基本原理(Principles of 3D
reconstruction)
从聚焦图像获取高度DFF[4,5](Depth From Focus)的基本原理是:首先通过计算机控制步进电机匀速从下而上、由远而近地调整显微镜的Z轴位置,利用摄像头获取微观物体的序列图像1—n,并将每幅图像的图像信息记录在三维矩阵f(x,y,i)中;然后判断每幅图像的聚焦区域和非聚焦区域;最后通过聚焦分析获取聚焦区域的深度信息,从而完成显微物体形貌的三维重建,DDF基本原理图如图1所示[6,7]。
3 三维形貌重构的相关算法(Algorithms of 3D
reconstruction)
3.1 聚焦评价算法
要准确判断序列图像中的聚焦区域和非聚焦区域,就必须对图像的聚焦程度进行判断,常用的测量聚焦程度的算法有灰度方差算法、梯度算法、Laplace算法和改进的Laplace算法等[8]。
Laplace算法是二阶导数算法,可获取图像的高频分量,但对x、y两个方向的二阶偏导数可能会符号相反,数值相互抵消,使图像的聚焦产生偏差[9,10],所以采用改进的Laplace算法作为聚焦评价算法,其计算方法如下:
(1)
为便于计算通常用差分代替微分,可得式(2)。
(2)
(2)
将式(2)应用到图像系列1—n中,计算出每个点在图像系列的改进Laplace算子值ML(x,y,i),将计算结果构成一个三维矩阵,但由于在实际操作中存在多种干扰因素,若直接采用计算结果将对三维形貌的重构产生较大影响,通过实验比较发现对计算结果进行一次步长为2的中值滤波操作可以得到更好的效果,中值滤波算法为[11,12]:
(3)
其中,ML(x,y,i)是点(x,y)在第i幅图像中计算出来的改进Laplace算子值,MML(x,y,i)是经中值滤波后的滤波值。
在每幅图像中都存在背景图像和物像[13],聚焦的物像是进行图像融合和三维重构的关键,因此需在图像中提取聚焦的物像,分离背景。由于改进的Laplace算法对图像的高频分量比较敏感,聚焦图像的改进Laplace算子值比较高,非聚焦图像或背景的改进Laplace算子值比较低,通过设置合适的阈值T,如果点(x,y)在图像序列中所有的中值滤波值都小于阈值T,则可判定它为背景。
取出点(x,y)在图像系列中的滤波值MML(x,y,i)大于或等于阈值T的那些数据,取其最大值作为聚焦值,表示为:
(4)
其中,FP(x,y)表示点(x,y)的聚焦值,即MML(x,y,i)在阈值以上的最大值。
3.2 显微物体高度测量算法
在本文中显微物体的高度采用的是相对高度而非真实高度,由于步进电机推动显微镜Z轴匀速移动,显微物体与显微镜头之间的距离构成线性关系(s=v*t),同时图像采集摄像机采集图像的速度也是恒定的,因此显微物体的高度就与图像的序号i对应起来(s→t),故采用图像的序号i作为显微物体的相对高度,表示为:
(5)
其中,FH(x,y)表示点(x,y)的相对聚焦高度,当点(x,y)在序号为m图像上的中值滤波值等于它的聚焦值,意味着点在第m幅图像上聚焦,故取m作为该点的聚焦高度;如果点是背景,就统一将高度确定为固定的序号N。
3.3 多聚焦图像融合算法
图像系列中的每幅图像都存在聚焦区域和非聚焦区域,从式(4)中可知,每个点的聚焦位置基本位于序列号不同的图像上,多聚焦图像融合就是将每个点的聚焦图像“拼接”到一幅二维图像上,从而得到清晰的显微物体全景深图像[14]。融合算法思想如下:根据式(5)可以确定像素点的聚焦位置,取出其聚焦位置的像素信息作为融合图像的像素信息,对图像中的每个点皆进行该操作就可完成全景深图像的融合,用公式表示为。
(6)
其中,f(x,y,m)是点(x,y)在聚焦高度为m处的像素,f(x,y)是全景深图像矩阵。
3.4 三维形貌重构算法
根据式(6)和式(5)可分别获得每个像素点的聚焦信息和聚焦时的高度信息,利用这两个信息可以重构出该像素点的三维形貌,对像素矩阵执行相同的操作即可重构出全部三维形貌。
4 实验结果与分析(Experimental results and
analysis)
为进行实验验证,将普通显微镜进行改装,整个实验系统包括计算机、天敏SDKZ000图像采集卡、Panasonic WV-GP470彩色数字摄像机、STEPPING MOTOT-42HSZA47-254步进电机、TMS320LF2407DSP控制模块和普通光学显微镜。
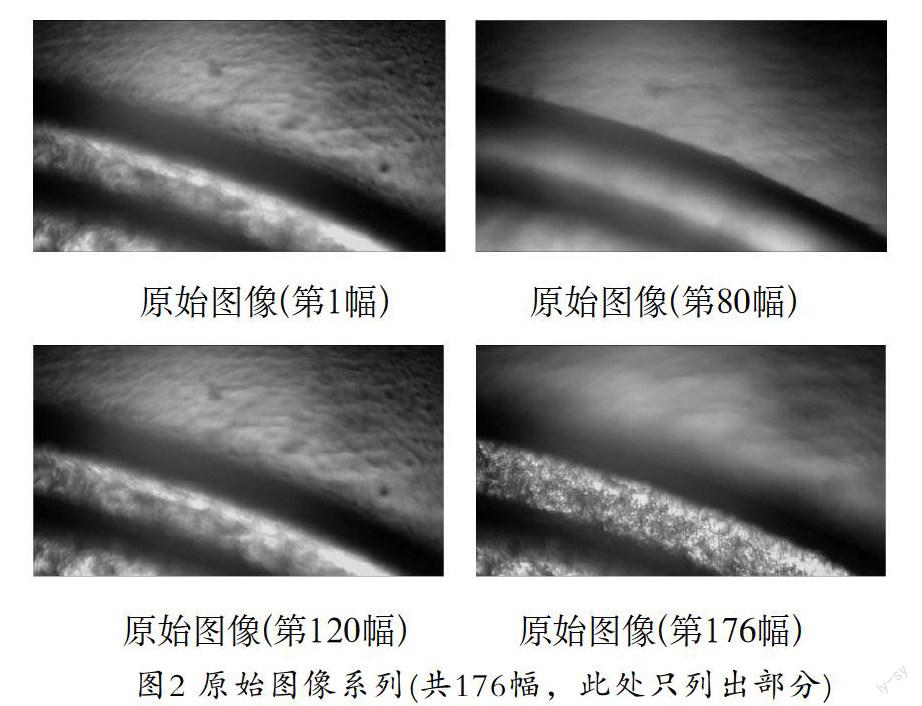
实验观测对象为五角铜硬币边缘,图像采集卡每隔370ms采集一张图片,共计采集176幅图像,部分原始图像如图2所示。
Fig.2 Original image series (Total 176, part of the list here)
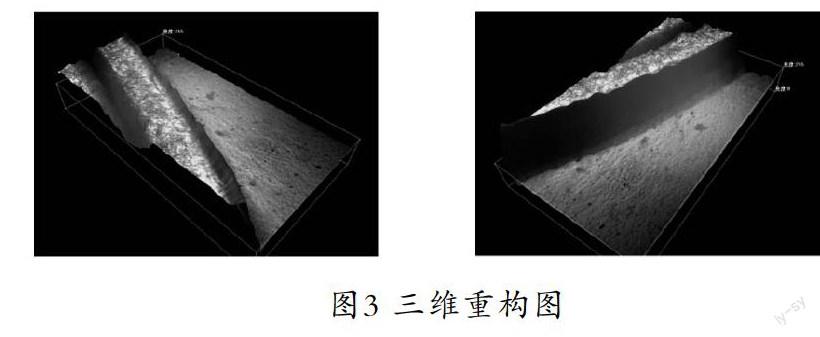
采用公式(3)和公式(4)求取每个像素点的中值滤波值和聚焦图层号,利用公式(5)和公式(6)获得每个像素点的聚焦高度,从而完成显微形貌的三维重构,重构后的效果图如图3所示。
通过对以上实验效果图的分析和比较,利用Laplace算子作为聚焦评价标准能较好地重构出显微物体三维形貌,它真实清晰地反映出物体的显微结构,是工业分析、医学分析的一个较好解决方案。
5 结论(Conclusion)
通过理论分析和实验验证,证明利用显微物体的二维图像重构出其三维形貌是可行的,利用改进的Laplace算子作为二维图像的聚焦评价标准能较好地测量出显微物体的聚焦高度,从而较准确地重构出显微物体的三维形貌。
此重构方法采用普通显微镜重构出三维形貌,让观察者更能全面、细致地观测和分析显微物体,将分析从二维扩展到三维。同时,由于普通显微镜价格低廉,可以极大地降低观测和研究成本。当然此重构方法也存在不足和改进之处,首先,该方法计算量大,运行速度较慢,内存消耗较大,不能进行实时重构;其次,图像系列始终从一个方向(Z轴)进行采集,不能实现多角度采集,无法重构出显微物体的全部三维形貌。这些都是以后改进的方向。
参考文献(References)
[1] 王伯雄,朱彦民,罗秀芝.三维形貌的快速测量方法[J].清华大
学学报,1999,32(2):57-58.
[2] 陈晓荣,蔡萍,施文康.光学非接触三维形貌测量技术新进展
[J].光学精密工程,2000,10(05):528-532.
[3] Takasaki H Moir.topography[J].Appl.Opt.,2013,9(10):1467-
1472.
[4] 韩冬兵.基于Depth from Focus的序列显微图像融合与三维测
量技术研究[M].北京航空航天大学硕士学位论文,2004.
[5] John Ens,Peter Lawrence.an investigation of methods for
determining depth from focus.IEEE Transactions on pattern
analysis and machine intelligence,2013,15(2):97-108.
[6] 王金岩,史文华,敬忠良.基于Depth from Focus的图像三维重
建[J].南京航空航天大学学报,2007,02:181-186.
[7] Shree K.Nayar,Yasuo Naka.Shape from Focus[J].IEEE
Transactions on pattern analysi and machine intelligence,
2014,16(8):824-830.
[8] 何晓昀.磨粒表面形貌分析与三维重构[M].武汉理工大学硕
士学位论文,2005.
[9] M.Subbarao,and T.S.Choi.Accurate Recovery of Three
Dimensional Shape from Image Focus[J].IEEE Trans. Pattern
Analysis and Machine Intelligence,2005 17(3):266-274.
[10] H.H.Hookins.The frequency response of a defocused optical
system[J].Proc,Royal Soc,London,A,2011,231:91-103.
[11] Volder Tympel.Three Dimensional Animation with a
Conventional Light Microscopy[C].Proceedings of Three-
Dimensional Microscopy: Image Acquisition and Processing
IV,SPIE,2013,2984:190-198.
[12] Alex P.Pentland.A new sense for depth of field[J].IEEE Trans
Patt Anal Machine Intelligence,2011,9(4):523-531.
[13] M.Subbarao,Y F.Liu.Accurate Reconstruction of Three-
dimensional Shape and Focused Image from a Sequence of
Noisy Defocused Images[C].Proceedings of SPIE Conference
on Three-Dimensional Imaging and Laser-Based Systems for
Metrology and Inspection,2010(11):178-191.
[14] A.P.Pentland.Depth of Scene from Depth of Field[M].Proc.
Image Understanding Workshop,2012.
作者简介:
胡致杰(1974-),男,硕士,讲师.研究领域:数据挖掘,图像
处理.
何晓昀(1978-),男,硕士,讲师.研究领域:模式识别,图像
处理.