
RTG作业区集卡安全通行智能指示系统研究与设计
2015-05-18 13:58孙谦等
中国高新技术企业 2015年17期
关键词:PLC控制
孙谦等

摘要:文章针对集装箱堆场作业过程中集卡车在RTG车道安全通行的问题,设计出一套简单可靠的智能指示系统,提供给集卡车司机能否安全通行的信息,有效避免集卡车剐蹭、拖拽RTG吊具事故的发生。系统对不同集卡车、集装箱类型及不同RTG工况下集卡能否安全通行进行智能判定,输出结果以“红灯停、绿灯行”的基本交通规则显示给集卡司机。
关键词:RTG作业区;集卡车;安全通行智能指示系统;PLC控制;智能判断 文献标识码:A
中图分类号:U491 文章编号:1009-2374(2015)18-0020-02 DOI:10.13535/j.cnki.11-4406/n.2015.18.011
1 研究背景
集卡车在堆场内提落箱或穿行RTG集卡通道过程中,因无地面指挥人员,如果双方沟通出现失误,极易发生集卡车剐蹭、拖拽吊具事故。目前RTG与集卡的沟通主要是RTG司机鸣笛或向集卡车喊话的方式,存在以下弊端:完全由人工判断能否安全通行存在较多不可控因素,与司机操作经验、沟通方式等多种因素有关;对于港内集卡司机来说,因熟悉作业场地与RTG作业方式,容易识别RTG发出的各种信号,但对于港外集卡司机来说,信号识别存在较大困难。为此,本文研究设计一套可靠、简单、智能的指示系统,消除人工判断造成的失误,给集卡车提供简单可靠的通行信号。
本文要解决的问题主要有以下三个方面:(1)可靠性:提供给集卡司机的通行信号必须抗干扰性强、纠错能力高、可靠性好;(2)简单化:因集卡司机对堆场状况及RTG工况熟悉程度不一,提供给集卡司机的通行信号必须容易识别,越简单越好;(3)智能化:因集卡车与集装箱型号多、高度不同,为兼顾安全与效率,判断通行的标准不能一概而论,要实现系统的智能判断。
2 系统设计
2.1 系统结构
通过实时获取RTG小车、起升机构的状态信息,PLC经过内部智能判断,给出当前时刻集卡车能否安全通行的信号,经过系统前端直观地显示给集卡车。本系统包括数据实时获取、PLC智能判断、系统前端显示三部分,其中智能判断部分是系统设计的核心,各部分的功能如下:
数据获取:小车位置信号、吊具起升状况、吊具开闭锁信号、吊具高度信息。
智能判断:小车位置是否在安全区、吊具是否在下降过程中、开闭锁信号是否触发、吊具是否在安全
高度。
信号显示:利用简单、直观的方式将集卡车能否通行信号显示出来。
系统功能通过软件、硬件两部分共同实现。软件部分完成系统数据的实时获取及数据智能判断,是本系统设计的核心。硬件部分完成系统信号的传输及前端显示功能,其中信号传输通过RTG主控系统的备用线路
完成。
本系统RTG主控PLC为YASKAWA CP-316H,起升机构采用YASKAWA PLG MSK-510-1024 1024P/R型增量编码器,小车机构采用YASKAWA PLG LF-60B-S89 600P/R型增量编码器。本文软硬件部分均基于该RTG控制系统设计与实现。
2.2 软件设计
RTG起升和小车机构电机一般配普通增量型编码器,PLC无法直接读取小车和起升机构的状态信息,系统通过读取编码器脉冲及扫描时间实时运算起升及小车位置(可精确至厘米),完成数据的实时采集。
数据的智能判断是系统软件设计的核心,也是整个系统功能的核心。通过智能判断,系统可综合RTG作业状态、集卡车及待提落箱型号信息,给出最终的指示信号。实现原理如下:
启动条件:系统检测RTG是否在作业状态,RTG作业时本系统启动。
RTG起升和小车安全位置设定:小车安全位置设定为离开集卡通道上方,本系统设置小车位置大于3m。在每一个作业循环内,系统对吊具安全高度进行初始化,当RTG进入工作状态后根据集卡和箱型智能设定,本系统中安全高度初始值设定6m。
系统智能判定原则:当小车处于集卡通道上方时只要吊具下降则认为此时通道上方为危险状态,指示灯显示集卡禁止通行。当空吊具落到集卡箱子上或者带着箱子的吊具落到集卡托盘上完成开闭锁动作后记忆当时的起升高度并存储,当吊具起升后实时检测吊具高度与记忆高度的间距,当大于导板高度(本文设置50cm)后则认为吊具与集卡安全分离,指示灯显示集卡可安全通行。当小车向前超过3m即认为离开集卡通道上方,此时不论何种情况,指示灯都亮绿灯。当小车下一次进入集卡通道上方自动触发吊具安全高度初始化,重新设定初始值。
特殊工况处理:系统以吊具开锁或闭锁动作完成为条件,智能计算当前状态下吊具安全高度,当吊具一次着箱或落箱未成功时,因系统未收到开锁或闭锁反馈信号,此时默认设定的初始值为吊具安全高度。在RTG作业间隙,按照操作规程吊具升至安全高度(大于6m),根据系统设定,系统不启动或输出安全通行信号。
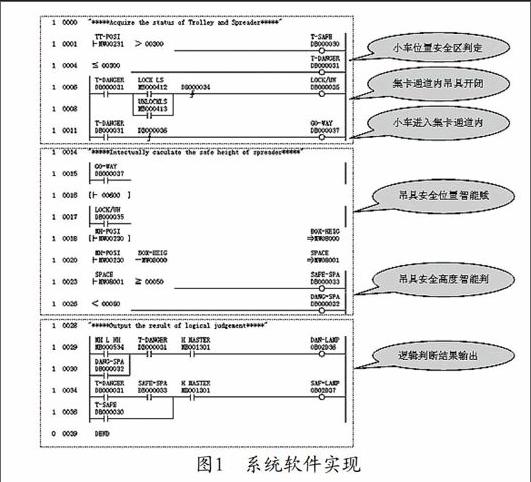
为实现程序控制的独立性、模块化,本系统软件设计部分新建子图程序,软件实现部分见图1所示:
2.3 硬件设计
为实现简单、直观显示的效果,本系统前端显示部分通过在RTG登机口附近安装一个LED指示灯,集卡司机可以通过后视镜观察指示灯颜色变化。利用“红灯停、绿灯行”最基本的交通规则,绿灯表示吊具已离开安全距离,可以安全通行;红灯表示吊具未离开安全距离,禁止通行。双色灯由RTG PLC输出2个备用中继控制,一个红灯(OB2D36,K244R6),一个绿灯(OB2D37,K244R7),220V电源取电气房R31、T31,电气房至登机口仪表箱备用线355#(10#,11#)两根线及仪表箱内原有的T31。
244R6常开点一端在电气房进R31,一端通过355(10#)线进登机口仪表箱再接红灯控制线。244R7常开点一端在电气房进R31,一端通过355(11#)线进登机口仪表箱再接绿灯控制线,两只灯的公共线进登机口仪表箱的T31,形成220V控制回路。指示灯电气回路及控制回路原理图见图2所示:
3 效果
系统前端显示采用“红叉绿箭”式400mm雨棚灯,安装在上机侧鞍梁内侧。集卡司机通过后视镜观察指示灯信号变化,按照“红灯停、绿灯行”的交通规则,安全通过RTG吊具下方通道。公司通过闸口向所有集卡发放信号灯使用说明书,集卡司机可以很容易的掌握信号灯使用方法。该系统安装一年来,未发生集卡拖拽、刮蹭吊具事故,有效地提高了集卡车在场地内尤其RTG作业区内的运行安全。
4 结语
RTG作业区集卡通行智能指示系统通过PLC智能判断给出当前时刻集卡车能否安全通行的信号,并且简单直观地显示出来。只要集卡司机严格按照指示灯“红灯停、绿灯行”的交通规则在堆场内行驶,可最大限度避免剐蹭、拖拽吊具等事故的发生。系统具有成本低、可靠性高、通用性好等优点,硬件安装简单、软件程序可方便地移植到其他集装箱堆场设备上,具有较强的推
广性。
参考文献
[1] 林伟国.岸桥防集卡拖拽吊具方案的研究及其应用
[J].港口科技,2014,(3).
[2] 苏君利.大型集装箱码头堆场装卸工艺研究[J].水运工程,2006,(10).
[3] 王玉革.安川电控系统在集装箱装卸机械电气改造中的应用[J].港口装卸,2011,(5).
[4] 谷长华.岸桥小车海陆侧位置判别方式改进[J].集装箱化,2014,(7).
(责任编辑:周 琼)
猜你喜欢
科技与创新(2017年1期)2017-02-16
山东工业技术(2016年24期)2017-01-12
建筑建材装饰(2016年11期)2016-12-29
科技创新与应用(2016年34期)2016-12-23
科学与财富(2016年18期)2016-12-22
