
考虑啮合激励时压电谐波活齿传动动力学研究
2015-05-14 07:19许立忠邢继春燕山大学机械工程学院河北秦皇岛066004
燕山大学学报 2015年3期
关键词:动力学
许立忠,李 冲,邢继春(燕山大学机械工程学院,河北秦皇岛066004)
考虑啮合激励时压电谐波活齿传动动力学研究
许立忠∗,李 冲,邢继春
(燕山大学机械工程学院,河北秦皇岛066004)
摘 要:提出了一种机电集成压电谐波传动系统,分析了系统的工作机理。为了更准确地描述传动中活齿系统动力学行为,在动力学模型中引入了啮合刚度激励,建立了啮合刚度激励方程,推导了考虑啮合激励时活齿系统动力学响应方程。以传动比为30的活齿系统为例,求解了系统在啮合激励作用下的时域和频域响应;分析了参数对频域响应的影响。结果表明活齿半径、波发生器偏心距和波发生器半径对共振频率影响较大,波发生器偏心距和波发生器半径对振幅影响显著。
关键词:啮合激励;压电谐波;活齿系统;动力学;强迫响应
0 引言
压电电机是20世纪80年代发展起来的微型电机,压电电机具有的高能量密度、精确定位、无电磁干扰等优点[1⁃2]使其在精密驱动和微纳米定位领域得到广泛应用,成为各国学者研究的热点,同时产生了一批适应各种环境的压电驱动装置。日本学者Hamamoto M等研制了一种模拟蜻蜓摆动飞行的微型飞行器,该飞行器通过4个重量为0.13 g的双向旋转行波压电超声电机实现各方向的运动,具有良好的性能[3];韩国Jeong S等设计和制造了一种三足式的薄状旋转超声电机用在小型移动设备上[4];日本Tomoaki M研制了一台定子体积只有1 mm3的微型超声电机,成为世界上最小的电机之一[5];美国学者Dragan A等从千足虫爬行得到启发,利用两个U型布置压电双晶片,研制了一台工作在114 Hz的新型低频压电电机[6];国内陈维山等通过利用放入环状凹槽里的20个压电堆和20个块状弹簧产生的行波,研制了一台利用径向弯曲模态的行波超声电机[7];赵淳生院士将团队研发的超声电机用于“嫦娥三号”探测器,实现了探测器在月球完美着陆,且具有稳定的性能[8]。
传统压电电机是通过定转子间的摩擦来驱动转子输出转矩,在此过程中存在能量损耗大、接触面磨损严重、效率低等问题。为解决此类问题,国内外学者提出了非接触式压电电机。Qiu W等研制了一台利用压电扭转振子和巨电流变液的双向非接触式旋转电机[9];鄂世举等提出了一种非对称波驱动的非接触式超声电机,并用实验验证了非对称波的存在[10];Stepanenko D等人设计了一种由面内弯曲振动的环状定子和片状转子构成的非接触式超声电机,该电机的特点是采用了超声驻波驱动[11]。
非接触式压电电机虽然避免了定、转子间的摩擦,但其输出力矩较小,承载能力较低。基于上述原因,本文提出了一种利用活齿啮合取代定、转子间摩擦来驱动转子旋转的机电集成压电谐波传动系统。活齿系统是该传动的重要部分,由波发生器、中心轮、活齿架和活齿组成。国内外对活齿系统动力学研究较少,梁尚明等对摆动活齿传动系统动力学模型进行了研究[12],金向阳等建立了航空用微小型正弦活齿系统动力学模型[13]。由于在运动过程中参与啮合的活齿数会发生变化,系统由此产生振动,严重影响系统的传递效率,且目前的研究很少考虑到啮合齿数变化产生的激励。因此,本文将对考虑啮合激励的活齿系统进行动力学分析。
1 系统动力学方程
1.1工作机理及动力学模型
工作原理如图1所示,压电谐波传动系统包括驱动部分和传动部分。驱动部分由位置互成90°的两套组件(压电堆、弹性体和摆动体)构成,其作用是产生连续谐波;传动部分由波发生器、中心轮、活齿架和30个活齿组成,其作用是传递转矩。工作时,给一路压电堆通入带偏置的正弦信号,压电堆产生时变轴向变形量,该变形量推动弹性体和摆动体在波发生器边沿产生时变偏移量。同时另一路压电堆通入与第一路压电堆相位差90°的信号,在波发生器另一方向产生类似的时变偏移量。两方向时变偏移量叠加,波发生器边沿上形成连续谐波,在谐波驱动下,与活齿架固连的输出轴获得连续转动。
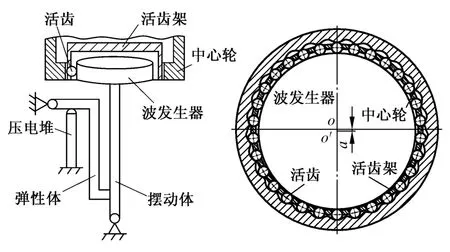
图1 工作原理简图Fig.1 Operating principle diagram
活齿系统动力学模型如图2所示,活齿齿数为Z,工作时半数活齿参与啮合,且啮合活齿是连续排列的,建模时根据活齿所处的位置决定是否处于啮合状态[14]。每个活齿与中心轮间的啮合角的不同造成了活齿的受力不同,角标s、c、r和p分别为波发生器、中心轮、活齿架和活齿,xj、yj和uj分别是各构件的3个方向的坐标。

图2 活齿系统动力学模型Fig.2 Dynamic model of movable tooth system
1.2啮合激励方程
活齿传动中,活齿架每转过π/870时,活齿与中心轮波齿间呈现n个齿和n+1个齿交替啮合,从而造成活齿和与之啮合的各构件间的啮合刚度也随时间周期性变化,该动刚度引起了系统的受迫振动。活齿/波发生器、活齿/中心轮以及活齿/活齿架啮合刚度变化规律如图3所示。
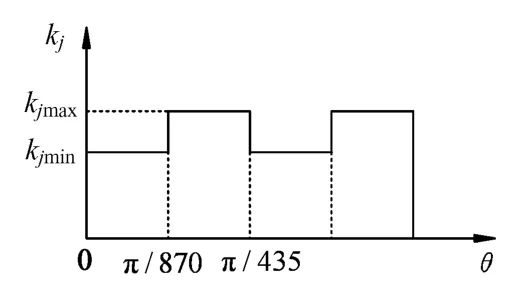
图3 活齿与各构件刚度随活齿架转角变化Fig.3 Stiffness between movable tooth and elements changes with rotation angle of the rotor
活齿与各构件啮合时的时变啮合刚度可表示为其平均值和随时间变化的动刚度两部分的叠加:
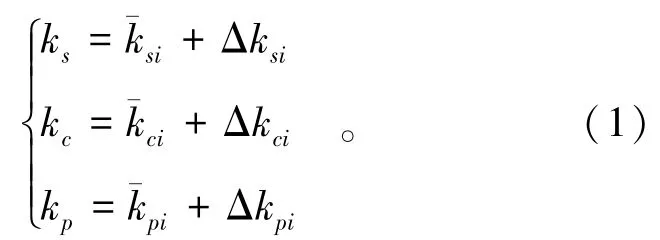
当n个活齿参与啮合时,活齿与波发生器、中心轮和活齿架间啮合刚度分别为ksmin、kcmin、kpmin;当n+1个活齿参与啮合时,活齿与波发生器、中心轮和活齿架间啮合刚度分别为ksmax、kcmax、kpmax。由弹性力学可得活齿与波发生器、中心轮和活齿架接触处的刚度表达式为
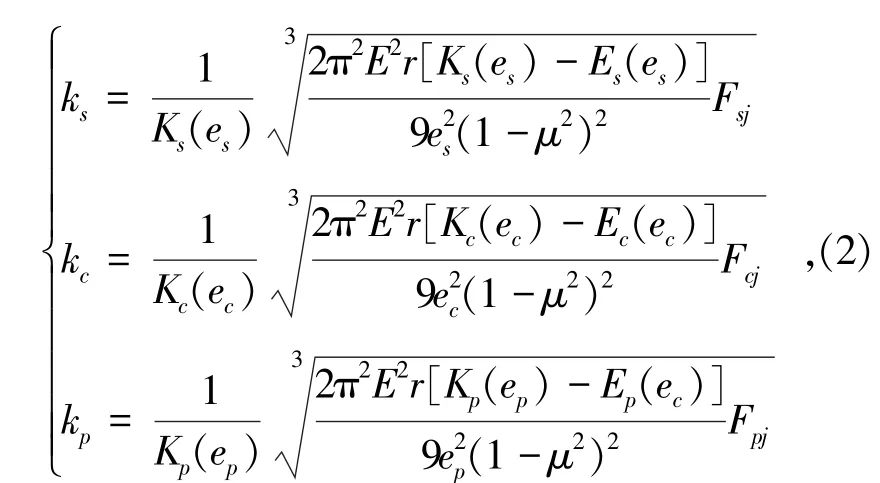
其中,Ki(ei)、Ei(ei)为活齿与各构件接触时与椭圆率相关的系数;Fij为活齿系统各构件受力,啮合活齿个数不同时Fij的值也不同。
则活齿与各构件间平均啮合刚度为
随时间周期性变化的啮合动刚度为奇函数,可以展成傅里叶级数为

式中,Δkni(t)为傅里叶级数系数;ωp为活齿架角速度,啮合激励频率。
活齿/波发生器、活齿/中心轮及活齿/活齿架随时间周期性变化啮合刚度对应的傅里叶系数为
则活齿与各构件间随时间周期变化的啮合动刚度为
刚度矩阵表达式为



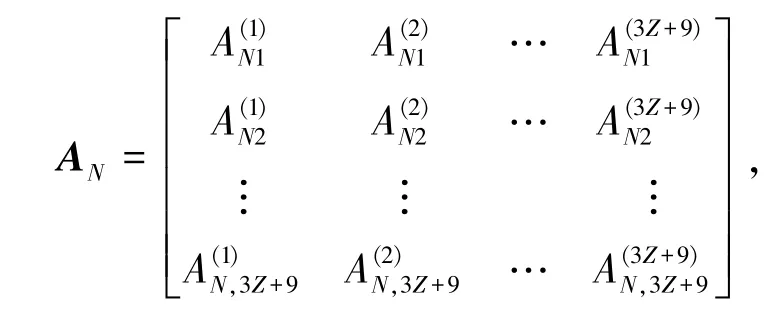
系统中,每个构件对应x、y和u向3个方程,3个中心构件和30个活齿则对应3Z+9个方程,故下文中矩阵的维数是3Z+9。活齿系统的静变形为

则当量激振力为
其中,Bs、Bc、Bp和B0为(3Z+9)×1列向量。
1.3考虑啮合激励动力学响应
考虑啮合激励时,活齿系统存在由输入转矩引起外部激振力Fe和啮合刚度变化引起的内部激振力Q。故系统所受的总激振力F为
F=Fe+Q,(12)故活齿系统在复合激励下的振动方程为

系统模态振型矩阵和主质量矩阵为

正则振型矩阵为
系统的正则质量矩阵、正则刚度矩阵、正则阻尼矩阵以及正则激振力矩阵为
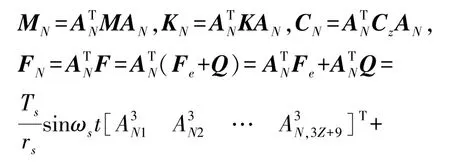
ATN[Δksi(t)Bs+Δkci(t)Bc+Δkpi(t)Bp+B0],其中,Fe=[0 0 Tssinωst/r 0 0 0…0 0 0]T,Ts为施加在波发生器上的力矩,ωs为外部激励频率。
则系统振动方程(13)正则变换后的方程为

,γi为第i阶正则振型的相对阻尼系数。初始位移和初始速度都为0,系统在考虑啮合激励下的第i阶正则坐标的响应为

其中,
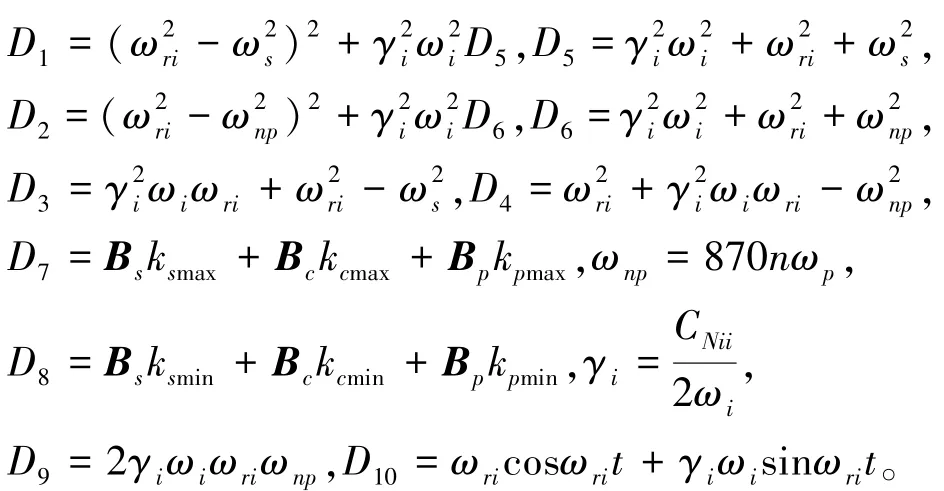
上式响应方程中,瞬态很快随时间衰减掉,在活齿系统受迫振动中稳态响应较大,则活齿系统在考虑啮合激励下的稳态响应为

则原坐标系下时域响应为

对式(14)进行拉普拉斯变换,得传递函数为

2 算例分析
2.1动力学响应
根据活齿传动理论计算,取系统活齿数Z为30,中心轮波齿数ZK为29,于是获得传动比i=Z/(Z-ZK)=30。活齿系统基本参数如表1所示,表2是活齿与各构件间的啮合刚度值。图4是取激励频率接近一阶共振频率(2 093 rad/s)时系统各构件在啮合激励作用下的稳态时域响应图,xj、yj、uj分别是各构件3个方向的振动;由于只考虑活齿的平面运动,故文中只选取了任意一个啮合活齿的x和y向进行分析;图5是活齿系统频域响应图,由于系统固有频率范围较大,低阶共振响应和高阶共振响应值差别较大,故将各构件频响曲线分为低频和高频描述。由图4和图5得出:
1)活齿各构件在考虑啮合激励时时域响应曲线总体呈现为正弦曲线,但是响应曲线中出现了不同程度的锯齿波,尤其是活齿响应比较明显,这是因为虽然ωs和ωp的频率相同,但激振力周期是2π/ωs,活齿啮合齿数变化周期是π/(435 nωp),故时域响应曲线是带有锯齿波的正弦曲线。活齿响应曲线波动比较大,这是由于活齿受到的啮合齿数变化影响较大。
2)时域响应最大值在波发生器us向中,主要原因是外部激励力施加在波发生器上,而外部激励力对受迫振动响应较大。频域响应各构件低频阶段的振幅远大于高频阶段的振幅,且同一构件各阶共振振幅存在随阶数的增大而减小趋势。
3)频响低频段对应振型是系统全振动模态,各构件共振幅值最大值出现在前两阶固有频率中,波发生器最大振幅出现在2 093 rad/s中,中心轮、活齿架和活齿最大振幅出现在60 582 rad/s中,且波发生器和活齿架最大幅值都在扭转u向,中心轮最大振幅在x向,活齿最大振幅在y向。
4)频响高频段包括波发生器平移振动模态、中心轮静止模态、活齿平移振动模态和啮合活齿直线振动模态,共振峰值集中在1.5×106~2×106rad/s和3×106~3.5×106rad/s两个频率段中。
5)在波发生器平移振动模态中,波发生器在3×106~3.5×106rad/s时沿u方向的振幅为0,只在平面内振动;在中心轮静止模态中,中心轮在1.5×106~2×106rad/s时x、y和u向的共振振幅都接近0,此时中心轮处于静止状态。
6)而在活齿平移振动模态和啮合活齿直线振动模态中,活齿在有些频率点时x、y两方向都有共振现象,在有些频率点只存在一个方向的共振,这些现象与模态振型相对应。在1.5×106~2×106rad/s只有活齿架振幅值较大,且最大值出现在u向;在3×106~3.5×106rad/s中x向的振幅值较大,中心构件y向都没有幅值,活齿y向有较小的幅值。
图4 活齿系统时域响应Fig.4 Time⁃domain responses of movable tooth system


图5 活齿系统频域响应Fig.5 Frequency⁃domain responses of movable tooth system
2.2参数影响分析
分别选取活齿半径r、波发生器偏心距a和波发生器半径R,分析参数对系统频域响应的影响,如图6~8所示。由于各构件受同一参数影响规律相似,这里只给出对系统及其重要的活齿架和活齿频域响应受参数影响的曲线。由图可得:
1)由式(2)得出,活齿同各构件间啮合刚度ki与r和各构件受力Fij都成正比,而Fij与r成反比,同时随着r增大,活齿与波发生器间的啮合角减小,与中心轮间的啮合角增大。在活齿16齿和15齿交变啮合过程中,kimax和kimin都变化,且kimax与kimin差值随r的增大而增大。
2)r对共振频率ωi和振幅都有影响,随着r的增大,ωi减小,振幅增大。由于ωi与ki同向变化,故ki随r的增加而减小。ωi的改变是由于ki的改变所致,振幅的改变一方面是由于ωi的改变造成了模态振型发生改变,另一方面是由于活齿16齿与15齿啮合刚度差值随r发生变化造成的。
3)随着a的增大,ωi增大,且增幅越来越大。振幅随a的增大而减小,且减幅越来越小。a对频响的影响是ωi改变所致,ωi则通过ki的改变而改变。首先,ki通过a影响Fij,且随a的增大Fij增大;其次,活齿与中心轮间的啮合角随a的增大而减小,与波发生器间的啮合角随a的增大而增大;再次,kimax与kimin差值随a的增大而增大。在多重因素下,ki随a的增大而增大,ωi随ki增大,同时模态振型改变,啮合激励力也发生改变,综合因素导致共振振幅发生变化。
4)R改变时,ωi和振幅均变化。随着R的增加,ωi减小,振幅增加。分析原因知,随着R的增加Fij减小,且ki随R的增加而减小,故ωi随R的增加而减小;在R变化过程中,活齿与中心轮间的啮合角随R的增大而增大,与波发生器间的啮合角随R的增大而减小;同时,kimax与kimin差值随R的增大而增大,啮合力同向变化,使振幅改变,振幅改变还与模态振型改变有关。
5)综上,ωi随r和R成负比例变化,随a成正比例变化;振幅随r改变较小,随a变化幅度逐渐增加,随R变化幅度逐渐减小。对ωi影响大的参数是r、a和R,对振幅影响大的参数是a和R。

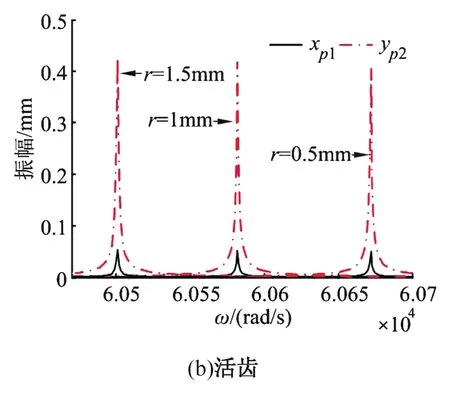
图6 活齿半径r对频域响应影响Fig.6 Effects of r on frequency⁃domain responses
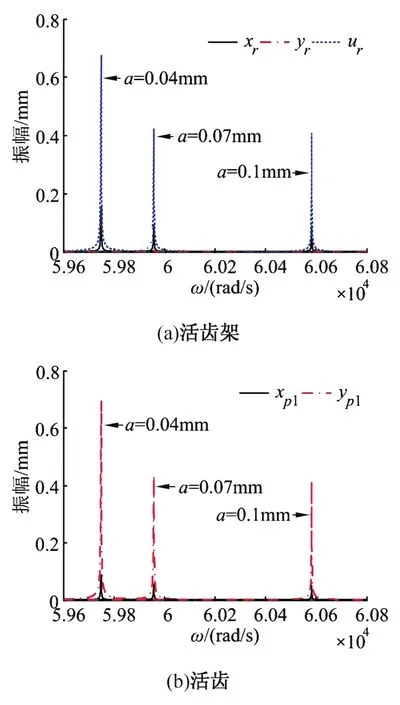
图7 波发生器偏心距a对频域响应影响Fig.7 Effects of a on frequency⁃domain responses

图8 波发生器半径R对频域响应影响Fig.8 Effects of R on frequency⁃domain responses
3 结论
将啮合刚度激励引入到机电集成压电谐波传动活齿系统动力学模型中,求解了考虑啮合激励时各构件稳态时域响应和频域响应,分析了参数对频域响应的影响。结果表明:
1)考虑啮合激励时时域响应波形中含有锯齿状波动,且活齿受啮合激励的影响最为显著;
2)各构件共振幅值最大值出现在前两阶非零固有频率中,波发生器和活齿架最大幅值都在扭转u向,中心轮最大振幅在x向,活齿最大振幅在y向;
3)对共振频率影响大的参数是r、a和R,对振幅影响大的参数是a和R。
参考文献
[1]许海 赵淳生.直线型超声电机的发展及应用 J .中国机械工程 2003 14 8 715⁃717.
[2]张健滔 朱华 赵淳生.杆式旋转超声电机在精密定位平台上的应用 J .中国机械工程 2011 22 15 1842⁃1846.
[3]Hamamoto M Kotani T Nakano I et al.Investigation on force transmission of direct⁃drive thorax unit with four ultrasonic motors for a flapping microaerial vehicle J .Advanced Robotics 2014 28 3 133⁃144.
[4]Jeong S Cheon S Park J et al.Design and fabrication of three touch point thin ultrasonic rotary motor J .Ferroelectrics 2014 459 1 143⁃152.
[5]Tomoaki Mashimo.Micro ultrasonic motor using a one cubic milli⁃meter stator J .Sensors and Actuators A Physical 2014 213 102⁃107.
[6]Dragan A Bryan B Shashank P.Millipede⁃inspired locomotion through novel U⁃shaped piezoelectric motors J .Smart Materials and Structures 2014 23 3 037001.
[7]Chen W Liu Y Yang X et al.Ring⁃type traveling wave ultrasonic motor using a radial bending mode J .IEEE Transactions on Ultra⁃sonics Ferroelectrics and Frequency Control 2014 61 1 197⁃202.
[8]沈大雷.南航助ƶ嫦娥 完美登月 N .中国教育报 2013⁃12⁃18 8 .
[9]Qiu W Hong Y Mizuno Y et al.Noncontact piezoelectric rotary motor modulated by giant electrorheological fluid J .Sensors and Actuators A Physical 2014 217 124⁃128.
[10]鄂世举 汤乐超 程光明.非对称波驱动的非接触式超声电机J .中国电机学报 2011 31 9 94⁃99.
[11]Stepanenko D Minchenya V.Development and study of novel non⁃contact ultrasonic motor based on principle of structural asymmetry J .Ultrasonics 2012 52 7 866⁃872.
[12]梁尚明 张均富 徐礼柜 等.摆动活齿传动系统振动的动力学模型 J .振动工程学报 2003 16 3 285⁃289.
[13]金向阳 于广滨 关祥毅.航空用微小型正弦活齿系统扭转振动动力学分析 J .中北大学学报 自然科学版 2007 28 4 299⁃303.
[14]李怀勇.新型杆式压电电机研究 D .秦皇岛 燕山大学 2013 24⁃30 123⁃131.
Study on dynamics of harmonic piezodrive oscillating tooth system by considering meshing incentive
XU Li⁃zhong LI Chong XING Ji⁃chun
School of Mechanical Engineering Yanshan University Qinhuangdao Hebei 066004 China
AbstractAn electromechanical integrated harmonic piezodrive system is proposed and the principle of the drive is discussed.In or⁃der to precisely describe the dynamic behavior of the movable tooth system precisely a meshing incentive is brought into the dynam⁃c model.The meshing incentive equations are established the system dynamic response equations by considering meshing incentive are derived.In order to solve the force responses the system′s transmission ratio of 30 is illustrated.In addition the time domain re⁃book=234,ebook=247sponses and the frequency domain responses under meshing incentive are settled and the influences of the parameters on the fre⁃quency domain response are analyzed.The results show that the radius of oscillating tooth has a great influence on the resonant fre⁃quencies the radius and eccentric distance of wave generator influence both resonant frequencies and amplitude observably.
Key wordsmeshing incentive harmonic piezodrive oscillating tooth system dynamics forced response
作者简介:∗许立忠(1962⁃),男,黑龙江齐齐哈尔人,博士,教授,博士生导师,主要研究方向为机电集成多场耦合动力学,Email:xlz@ysu.edu.cn。
基金项目:国家自然科学基金资助项目(51275441)
收稿日期:2014⁃09⁃16
文章编号:1007⁃791X(2015)03⁃0226⁃09
DOI:10.3969/j.issn.1007-791X.2015.03.006
文献标识码:A
中图分类号:TH113.1
猜你喜欢
数学物理学报(2022年5期)2022-10-09
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
黑龙江大学自然科学学报(2022年1期)2022-03-29
气体物理(2021年2期)2021-03-03
中学生数理化·高一版(2020年1期)2020-02-20
中学物理·高中(2016年8期)2016-08-08
中国塑料(2016年5期)2016-04-16
空间控制技术与应用(2015年2期)2015-06-05
浙江大学学报(工学版)(2015年2期)2015-05-30
