
基于CANopen协议的公铁两用牵引车运动控制实现
2015-05-11 04:21:14赵大兴赵国栋
制造业自动化 2015年23期
赵大兴,赵国栋,许 万,王 璜
(湖北工业大学 机械工程学院,武汉 430068)
基于CANopen协议的公铁两用牵引车运动控制实现
赵大兴,赵国栋,许 万,王 璜
(湖北工业大学 机械工程学院,武汉 430068)
0 引言
随着我国铁路运输业和城市轨道交通的快速发展,传统的公铁两用牵引车难以满足现场作业需求[1]。传统公铁两用牵引车的液压运动控制系统响应速度慢、稳定性差、不能实现反馈、运动控制误差偏大,使得牵引车的动力性能、操作性能、工作效率无法达到要求[2]。
以电能作为驱动的新型公铁两用牵引车控制系统[3],引入在汽车总线网络中占主导地位的CAN总线[4],采用广泛应用于欧洲的工业现场总线协议CANopen[5]通讯协议,为实现公铁两用牵引车的运动控制提供了可靠性高、实时性强的状态获取和命令下发通道[6,7]。
分析公铁两用牵引车机械结构及主要参数;设计牵引车运动控制CAN总线网络,完成CANopen协议通讯初始化设置,包括各CANopen设备节点ID(Node_ID)和CAN标示符(COB_ID)的分配,通信模型、通信速率、通信对象的设置;分析牵引车的运动速度和转向角度,得出了牵引车运动控制理论计算公式,包括行走电机频率与平移速度关系式,转向电机频率与转向速度关系式,橡胶轮转向角位移误差计算公式,为牵引车的运动控制提供了理论依据,使得牵引车的运动速度误差和转向角度误差在允许的范围之内,保证牵引车运动控制精度,提高了牵引车控制系统的可靠性。
1 牵引车机械结构及主要参数
公铁两用牵引车机械结构如图1所示,主要包括底盘,车架,控制单元,液压单元,驱动转向单元。控制单元由车载无线接收器,手持无线遥控器组成。液压单元由油泵电机,齿轮油泵,电磁换向阀,万向轮,前导向轮,后导向轮组成。驱动转向单元由行走电机,减速箱,转向电机,转向直齿轮副,橡胶轮组成。
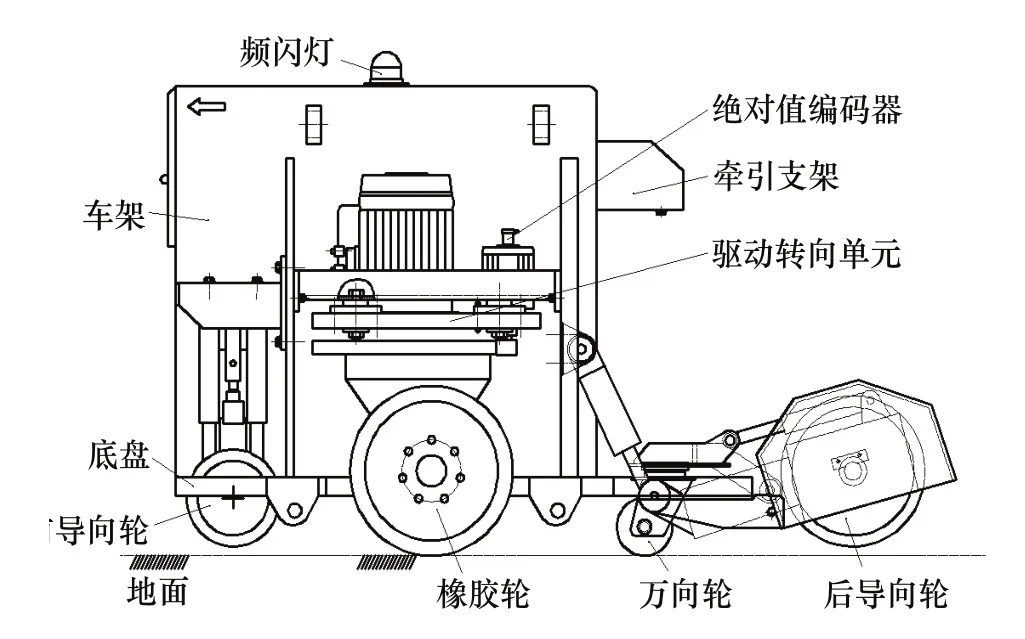
图1 公铁两用牵引车机械结构图
公铁两用牵引车驱动转向单元三维模型如图2所示,驱动转向单元作为整车的执行机构,是牵引车的重要组成部分。牵引车机械传动配置方式为:驱动轮与转向轮合一,橡胶轮既是驱动轮也是转向轮。转向方式为:双舵轮转向方式。
牵引车驱动转向单元主要参数如表1所示,公铁两用牵引车的运动控制本质上是驱动转向单元的运动控制,驱动转向单元各部件的主要参数直接影响着牵引车的运动控制。
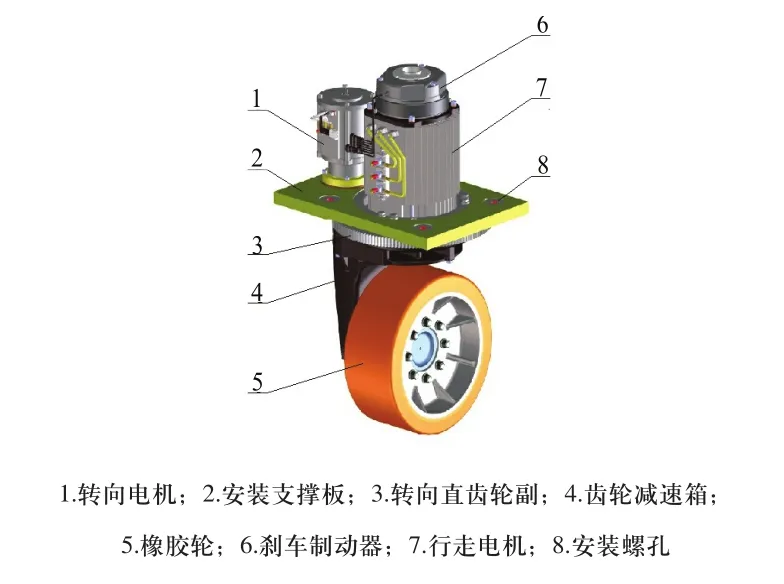
图2 驱动转向单元三维模型图

表1 驱动转向单元主要参数
2 牵引车运动控制总线网络设计
2.1 CAN总线网络拓扑结构
牵引车运动控制CAN总线网络拓扑结构及各CANopen设备节点ID(Node_ID)分配如图3所示。CAN总线网络由两条信号线CAN_H和CAN_L、两个120Ω的终端电阻、可编程控制器(ID=30)、左行走电机驱动器(ID=9)、右行走电机驱动器(ID=8)、左转向电机驱动器(ID=17)、右转向电机驱动器(ID=16)、左绝对值编码器(ID=1)、右绝对值编码器(ID=2)组成。CAN总线通信介质是双绞线,避免了电磁信号的干扰。由于总线传输距离不超过40m,选用的终端电阻为120Ω,消除总线两端导线上的信号反射,避免信号失真。
2.2 CANopen协议初始化设置
CANopen协议通信模型为主从通信模型,可编程控制器(PLC)是CAN总线上唯一的主机,其余设备均为从机。通信速率为250kbit/s,保证数据传输的实时性,且不易受外界电磁干扰。4种通信对象的功能分别为:

图3 CAN总线网络拓扑结构及节点ID分配
1)服务数据对象(SDO):访问绝对值编码器对象字典(OD),完成编码器初始化设置。
2)过程数据对象(PDO):传输行走电机、转向电机频率的设定值,实时反馈频率的实际值;实时反馈橡胶轮转向角度。
3)网络管理对象(NMT):可编程控制器(PLC)是唯一的主节点,管理整个网络,其余设备均为从节点。左右绝对值编码器作为从节点,以100ms的周期向主节点发送心跳报文(Heartbeat)。
4)预定义报文或特殊功能对象:同步对象(SYNC),保证两橡胶轮驱动和转向的同步性与协调性;紧急事件对象(Emergency),显示各设备内部错误。
运动控制总线网络中各设备均为标准化协议的CANopen设备,则牵引车运动控制总线CAN标识符(COB_ID)的分配如表2所示。
3 牵引车运动控制分析
3.1 牵引车速度控制
公铁两用牵引车运动状态包括纵向平移,横向平移,对角线平移,圆周转向。可编程控制器(PLC)通过CANopen协议发送频率设定值到总线网络,左右行走电机驱动器、左右转向电机驱动器同时接收到报文,同步驱动左右行走电机、左右转向电机,实现牵引车的平移和转向。
公铁两用牵引车速度控制包括平移速度控制和转向速度控制,控制方式均为开环控制。通过改变行走电机和转向电机的频率实现平移速度控制和转向速度控制。行走电机频率与牵引车平移速度关系式,转向电机频率与牵引车转向速度关系式由以下公式可得。


表2 运动控制总线CAN标识符(COB_ID)分配表

在不考虑三相交流异步电机转差率的情况下,行走电机转速:

转向电机转速:
联立式(1)~式(5)可得行走电机频率:

联立式(6)、式(7)可得转向电机频率:

以上式中,v3为橡胶轮平移线速度,m/s;r为橡胶轮半径,m;3ω为橡胶轮平移角速度,rad/s;d为橡胶轮直径,m;n3为橡胶轮平移转速,r/min;i1为行走机构总传动比;n1为行走电机转速,r/min;f1为行走电机频率,Hz;p1为行走电机磁极对数;n2为转向电机转速,r/min;f2为转向电机频率,Hz;p2为转向电机磁极对数;i2为转向机构总传动比;n4为橡胶轮转向转速,r/mim。
牵引车在功率一定的情况下,在公路上自由行走时,需要减小牵引力,增加速度,牵引车能运行在高速档5km/h或者低速档3km/h;在铁路上进行牵引作业时,需要降低速度,增大牵引力,牵引车只能运行在低速档3km/h。已知行走机构总传动比i1=22.78,行走电机磁极对数p1=2,橡胶轮直径d=406mm,橡胶轮平移线速度v3=3km/h或5km/h,分别代入式(8)可得行走电机频率f1=29.78Hz或49.64Hz。最终设定行走电机低速频率f1=30Hz,高速频率f1=50Hz,由式(5)可得行走电机低速转速n1=900r/min,高速转速n1=1500r/min。
为保证橡胶轮转向角度的精度,牵引车转向速度设定为3r/min。已知转向电机磁极对数p2=2,转向机构总传动比i2=305.27,橡胶轮转向转速n4=3r/min,代入式(9)可得转向电机频率f2=30.5Hz。最终设定转向电机频率f2=30Hz,由公式(6)可得转向电机转速n2=900r/min。
3.2 牵引车转向角度控制
公铁两用牵引车转向角度控制主要是橡胶轮转向角度控制,控制方式为开环控制,同时绝对值编码器安装在转向电机尾端的输出轴上,实时跟踪橡胶轮的转向角度。根据设定角度,设置相应的减速点,当橡胶轮转到减速点时,转向电机驱动器的输入频率降低,完全释放转向电机的加速器,转向电机的转速开始降低,最终使得橡胶轮转到设定角度。
橡胶轮转向轨迹如图4所示,A为右转极限点也是编码器零点,B为右转极限减速点,C为右转调直减速点,D为调直复位点也是机械零点,E为左转调直减速点,F为左转极限减速点,G为左转极限点。其中AB=CD=DE=FG。橡胶轮转到A点、G点和D点时,牵引车实现横向平移和调直复位功能。

图4 橡胶轮转向轨迹
假设未设置减速点,因延时误差的存在,最终橡胶轮会转过设定点而产生误差,其中产生的角位移误差即为减速点与设定点之间的角位移。橡胶轮角位移误差包括编码器反馈延时角位移误差和转向电机减速延时角位移误差,由以下公式计算可得。

联立式(10)~式(16)可得橡胶轮角位移误差:

以上式中,ω2为转向电机角速度,rad/s;n2为转向电机转速,r/min; 为编码器反馈延时角位移,rad;t1为编码器反馈延迟时间,s;a为转向电机减角速度,rad/s2;ωt为转向电机末角速度,rad/s;为转向电机末转速,r/min;t2为转向电机减速延迟时间,s;∆θ2为转向电机减速延时角位移,rad;∆θ3为转向电机角位移,rad;∆θ为橡胶轮角位移误差,rad;i2为转向机构总传动比。已知编码器反馈延迟时间t1=0.1023s,转向电机减速延迟时间t2=0.75s,转向电机转速n2=900r/min,转向电机末转速nt=0r/min,代入公式(17)可得橡胶轮角位移误差∆θ=0.04π=7.2°,即AB=CD=DE=FG=0.04,则A点设为0°,B点设为7.2°,C点设为82.8°,D点设为90°,E点设为97.2°,F点设为172.8°,G点设为180°。
4 测试结果分析
在公路模式空载状态下,牵引车运动控制总线监控数据如图5所示。图5(a)将编码器零点与机械零点的偏差值保存在右绝对值编码器中,编码器进入运行状态。图5(b)橡胶轮调直复位,牵引车以实际速度2.97km/h平移前进。

图5 牵引车运动控制总线数据监控
牵引车速度控制实际值与理论值如表3所示,左右行走电机实际速度相同,左右转向电机实际速度相同,保证左右橡胶轮运动控制的同步性与协调性;由于三相交流异步电机转差率的存在,行走电机和转向电机的实际反馈速度比理论设定速度降低了1.6%,速度误差在允许范围之内,保证牵引车的运动速度控制精度。
牵引车转向控制实际值与理论值如表4所示。左右橡胶轮之间的相对位置误差小于0.5°,左右橡胶轮转向的理论设定位置与实际位置之间的平均误差为0.95°,误差主要由左右驱动转向机构的安装精度和控制系统延时滞后所引起。左右两轮相对位置误差,理论位置与实际位置误差均在允许范围之内,保证牵引车的转向角度控制精度。
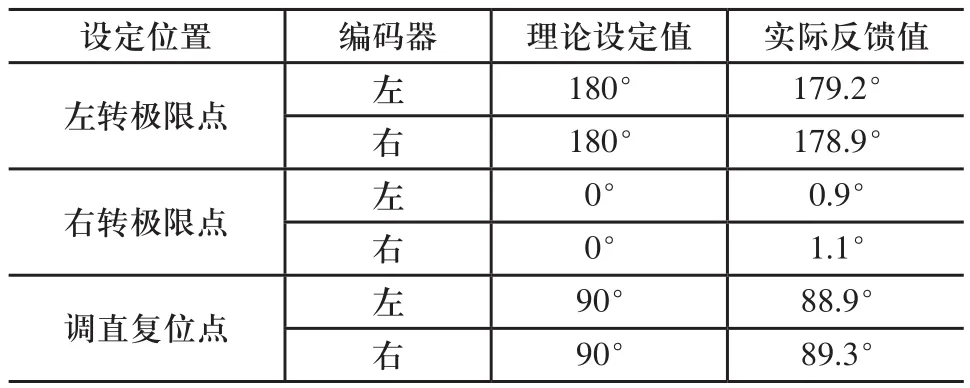
表4 牵引车转向控制实际值与理论值
5 结论
分析公铁两用牵引车的机械结构及主要参数;设计牵引车运动控制CAN总线网络,完成了CANopen协议通讯的初始化设置,为实现公铁两用牵引车的运动控制提供了可靠性高、实时性强的状态获取和命令下发通道;分析牵引车的运动速度和转向角度,得出了牵引车运动控制理论计算公式,为牵引车的运动控制提供了理论依据。测试结果表明,CANopen协议正常通讯,实现了公铁两用牵引车所需的运动状态,牵引车的运动速度误差和转向角度误差在允许的范围之内,保证了公铁两用牵引车的运动控制精度,实现了牵引车控制系统的运动控制。
[1]季晓丹.公铁两用车的发展历程和趋势[J].铁道机车与动车,2015,(3):1-5.
[2]侯广慧.GQ045型公铁两用牵引车液压传动及控制设计[J].液压与气动,2014,(4):25-27.
[3]余小波,左永博.新型蓄电池公铁两用车概述[J].装备制造技术,2013,(4):129-130.
[4]韩成浩,高晓红.CAN总线技术及其应用[J].制造业自动化,2010,33(2):146-149.
[5]Holger Zeltwanger,周立功,黄晓清,严寒亮.现场总线CANopen设计与应用[M].北京:北京航空航天大学出版社,2011:28-33.
[6]张厚林.CANopen通讯协议设计与实现[D].武汉:华中科技大学,2009:2-4.
[7]孟诏.基于CANopen协议的CAN总线控制系统研究[D].北京:北京工业大学,2008:21-29.
Motion control implementation of electric road/rail tractor based on CANopen protocol
ZHAO Da-xing, ZHAO Guo-dong, XU Wan, WANG Huang
运动控制单元是电动公铁两用牵引车控制系统的核心,控制系统主控制器采用CANopen协议进行数据通讯,为实现公铁两用牵引车的运动控制提供了可靠性高、实时性强的状态获取和命令下发通道。分析公铁两用牵引车机械结构及主要参数;设计牵引车运动控制CAN总线网络,完成CANopen协议初始化设置;分析牵引车的运动速度和转向角度,得出牵引车运动控制理论计算公式,为牵引车的运动控制提供了理论依据。测试结果表明,CANopen协议正常通讯,实现了公铁两用牵引车所需的运动状态。牵引车的运动速度误差和转向角度误差均在允许的范围之内,保证了公铁两用牵引车的运动控制精度。
公铁两用牵引车;CAN总线;CANopen协议;运动控制
赵大兴(1962 -),男,教授,博士,主要从事机械设计和机器视觉方向的研究。
TP273
A
1009-0134(2015)12(上)-0135-05
10.3969/j.issn.1009-0134.2015.23.40
2015-09-18
国家自然科学基金(51405144);湖北省自然科学基金面上项目(2014CF598);湖北省科技支撑计划(2014BAA006)
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31 09:03:38
中国核电(2021年3期)2021-08-13 08:56:56
减速顶与调速技术(2020年3期)2021-01-18 06:30:26
装备制造技术(2020年3期)2020-12-25 05:22:26
基层中医药(2020年9期)2020-11-27 01:55:28
今日农业(2019年12期)2019-08-15 00:56:32
廉政瞭望(2017年21期)2017-12-07 08:32:31
中国设备工程(2017年23期)2017-01-20 12:58:44
汽车实用技术(2015年8期)2015-12-26 09:01:04
铁道运营技术(2015年3期)2015-12-23 09:27:16
