
改进人工势场法的机器人路径规划
2015-05-10 11:06:12尹国强贾云伟
制造业自动化 2015年23期
尹国强,贾云伟,张 慧
(1.天津理工大学 天津市先进机电系统设计与智能控制重点实验室,天津 300384;2.天津出入境检验检疫局,天津 300457)
0 引言
机器人路径规划是机器人学科中的重要组成部分,主要指机器人依据特定的规则从起始位置移动到目标位置,并且在移动过程中安全的避开障碍物。关于机器人路径规划问题有很多算法,如人工势场法[1],遗传算法[2,3],模糊控制[3],粒子群算法[4]等,每一种算法都有其相对优势。其中,人工势场法结构简单,计算量小,规划出的避障路径平稳安全,有利于实现实时控制,因此,得到了广泛的应用。
1 传统人工势场法
传统人工势场法理论由Khatib在1985年提出[1],此方法最初应用于机器人避障规划,且实现了实时避障。所谓人工势场法就是通过搜索势函数下降的方向寻找一条从起点到目标点的无碰路径[5],常用的势场法是梯度势场法,势场的负梯度作为作用在机器人上的虚拟力,目标点对机器人产生吸引力,障碍物对机器人产生排斥力,机器人在吸引力和排斥力的共同作用下驶向目标点[6]。其中,吸引力的大小随着机器人与目标点距离的减小而减小,排斥力的大小随着机器人与障碍物距离的减小而增大。虽然人工势场法在避障路径规划中得到了广泛研究,但是当目标点在障碍物的影响距离内时,由于障碍物对机器人的排斥力在目标处不为零,导致机器人无法到达目标点或者在目标点附近往复震荡。本文针对这一问题引进新型排斥力算法,确保机器人在目标点受力平衡。
2 人工势场法模型
2.1 传统人工势场法模型
吸引势场函数模型如式(1)所示。

其中,ξ为吸引增益系数,[x,y]为机器人运动过程中任意点的坐标,[xg,yg]为目标点坐标。从式(1)中可以发现,目标点对机器人的吸引作用随着机器人与目标点距离的增大而增强。
排斥势场函数模型如式(2)所示。

其中η为排斥增益系数;ρ为机器人到障碍物的距离;0ρ为障碍物的有效影响距离,当0ρρ<时,障碍物对机器人产生排斥作用。从式(2)中可以发现,在障碍物的有效影响距离内,障碍物对机器人的排斥作用随着机器人与障碍物距离的减小而增强。
势场的负梯度作为作用在机器人上的虚拟力,其排斥力计算如下。
排斥力为排斥势场的负梯度,如式(3)所示。

排斥力大小如式(4)所示。


图1 传统排斥力场
2.2 改进人工势场法模型
当目标点在障碍物影响距离内时,为保证机器人在目标点处不受障碍物的排斥作用,文献[7]中提出在式(2)的基础上乘上机器人与目标点相对距离的平方,如式(5)所示。

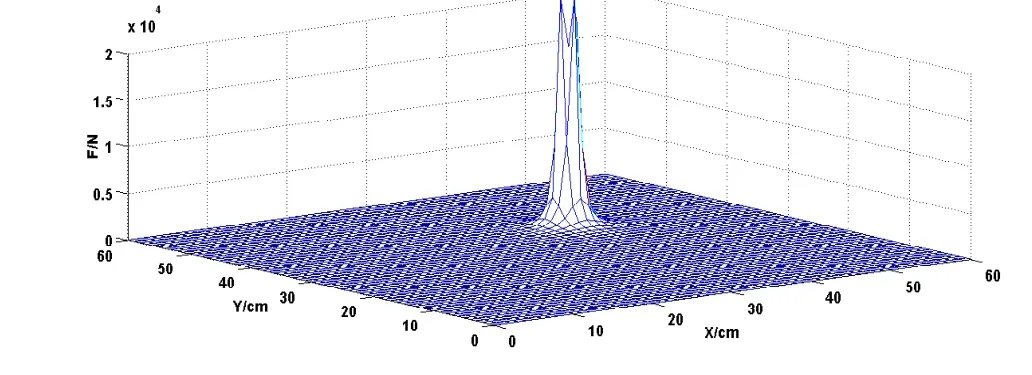
图2 改进方法一排斥力场

图3 改进方法一排斥力场局部放大
相对于式(2),式(5)虽然保证了机器人在目标点处不受障碍物的排斥作用,但当机器人与目标点距离较远时,导致排斥势场形状受到极大改变[8],使机器人避开障碍物的路径与障碍物距离较远,延长了机器人到达目标点的时间。为了减小排斥势场形状的改变,文献[8]对式(5)进行进一步改进,如式(9)所示。


图4 改进方法二排斥力场

图5 改进方法二排斥力场局部放大
其中R为机器人半径,与式(5)比较,当机器人与目标点距离较远时,所乘的变量近似为1,势场形状不受影响,只有当机器人与目标很近时,势场形状才会受到影响。
上述两种方法都是在排斥势场强度的基础上进行改进,以确保机器人能顺利到达目标点,但这两种改进方法扭曲了排斥势场的形状,导致机器人避开障碍物时的路径较长,降低了路径规划效率。由于势场的负梯度作为作用在机器人上的虚拟力,为了使排斥势场的形状不受影响,本文对作用在机器人上的排斥力进行改进,以保证机器人在目标点处所受排斥力为零。
本文提出改进方法在原始排斥力的基础上乘一个变量如式(13)所示。


图6 改进方法三排斥力场
由于式(13)是在排斥力的基础上进行改进,对排斥势场的形状没有改变,而且保证机器人在目标点处所受排斥力为零,同时考虑到机器人的半径,使规划出的路径更安全可靠。
3 仿真实验
为了验证算法的有效性,本文基于MATLAB软件进行了仿真实验,对比几种方法在相同势场参数下所规划路径的区别,由于排斥系数η的取值对排斥力大小的影响较大,因此,在设定参数时主要选取不同的η值进行比较分析。
首先,设排斥系数η=100,目标点坐标为(50,50),障碍物坐标为(40,40),机器人半径R=8,障碍物影响距离ρ0=30。

图7 原始方法路径
图7是传统人工势场法的路径仿真,机器人虽然可以安全避开障碍物,但在目标点处仍受到障碍物的排斥作用,导致机器人在目标点附近往复震荡。

图8 改进方法一路径
图8是改进方法一的路径仿真,虽然能够保证机器人到达目标点,但是在障碍物附近的路径与图5比较,避开障碍物的路径较长,延长了路径规划时间。

图9 改进方法二路径
图9是改进方法二的路径仿真,相对于图8,机器人避开障碍物的路径更贴近障碍物,提高了路径规划的效率,然而在障碍物前方机器人行走路径发生突变,使机器人沿此路径行走容易产生震荡。

图10 改进方法三路径
图10是本文提出的改进方法三的路径仿真,从图中可以观察到,机器人不仅可以到达目标点并停止,其避障路径也比较高效、平滑,即避免了改进方法一对实时性的影响,也避免了改进方法二可能带来的机器人震荡。为直观的表达四种路径的不同,将四种路径放在同一坐标系中,并局部放大,如图11和图12所示。
图11和图12可知,改进方法三的路径长度小于其他方法的路径长度,而且避开障碍物的路径平稳光滑,极大提高了机器人的路径规划效率。
取η=400,其他参数不变,对比几种路径,所得结果如图13所示。

图11 全局路径

图12 四种方法路径对比局部放大

图13 η=400时的路径对比
图13所示,当排斥系数η选取过大时,导致机器人根据改进方法一进行路径规划时,不能到达目标点,这是由于η选取过大,导致机器人在目标点附近受到的排斥力远大于吸引力,即使在目标点机器人可以达到受力平衡,然而由于斥力过大,机器人却无法到达目标点。当η值选取足够大时,其他改进方法同样会出现此问题。然而,当改进方法三出现此问题时,η的值比其他两种改进方法出现此问题时的值大很多,这说明在其他势场参数相同的情况下,改进方法三的排斥系数值的选取较为灵活。
取η=10,其他参数不变,对比几种路径,所得结果如图13所示。
如图9所示,当η值选取过小时,障碍物对机器人的排斥力太小,导致机器人无法安全避开障碍物。由图8和图9可知,合理的选取参数η,机器人的行驶路径会更平稳安全,否则,将导致机器人不能到达目标点或者不能安全避开障碍物。

图14 η=10时的路径对比
4 结束语
基于人工势场法的机器人路径规划,当目标点在障碍物的影响距离内时,机器人所受障碍物的排斥力大于目标点对其的吸引力,导致机器人无法在目标点保持静止,本文提出的改进排斥力算法保证了机器人在目标点处所受合力为零,通过仿真结果对比分析,基于本文提出的改进方法规划出的机器人路径得到明显的改善,机器人避开障碍物的路径平稳安全且更贴近障碍物,缩短了路径规划时间。然而,这种新型排斥力算法同样存在不足之处,当排斥系数η选取不当时,其规划的机器人路径会出现图13和图14所示的结果,导致机器人不能到达目标点或者与障碍物发生碰撞。
[1] O.Khatib. Real time obstacle avoidance for manipulators and mobile robots[J].IEEE International conference on Robotics and Automation.1985,500-505.
[2] 刘国栋,谢宏斌,李春光.动态环境下基于遗传算法的移动机器人路径规划的方法[J].机器人,2003,327-331.
[3] K.Samsudin, FA.Ahmad, S.Mashohor. A highly interpretable fuzzy rule base using ordinal structure for obstacle avoidance of mobile robot[J].Elsevier applied softcomputing.2011,1631-1637.
[4] 刘关俊.基于粒子群算法的移动机器人路径规划研究[D].中南大学,2007.
[5] S.S.Ge,Y.J.Cui.New Potential Functions for Mobile Robot Path Planning[J].IEEE Transactions on robotics and automation.2000,615-620.
[6] Li Zhou, Wei Li. Adaptive artificial potential field approach for obstacle avoidance path planning[A].IEEE computer society[C].2014,429-432.
[7] B.H.Krogh.A generalized potential field approach to obstacle avoidance control[A].Robotic Research. The Next Five Years and Beyond[C].1984,1-15.
[8] J.Sfeir,M.Saad, H.Saliah-Hassane.An improved artif i cial potential field approach to real-time Mobile robot path planning in an Unknown Environment[A].IEEE International Symposium on Robotic and Sensors Environments[C].2011,208-213.
猜你喜欢
军事文摘(2022年8期)2022-11-03 14:22:01
北京航空航天大学学报(2021年4期)2021-11-24 01:12:58
高技术通讯(2021年5期)2021-07-16 07:20:42
小学科学(学生版)(2021年3期)2021-04-13 08:26:18
哈哈画报(2021年11期)2021-02-28 07:28:45
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
石油地球物理勘探(2017年4期)2017-12-18 07:15:06
中华老年口腔医学杂志(2016年1期)2017-01-15 14:24:42
系统工程与电子技术(2016年4期)2016-08-24 07:46:22
