动态环境中的WiFi指纹自适应室内定位方法*
2015-05-09 09:50:16陈斌涛刘任任陈益强刘军发蒋鑫龙刘定俊
传感技术学报 2015年5期
陈斌涛,刘任任,陈益强,刘军发,蒋鑫龙,刘定俊
(1.湘潭大学信息工程学院,湖南 湘潭 411105;2.中国科学院计算技术研究所,北京 100190)
动态环境中的WiFi指纹自适应室内定位方法*
陈斌涛1*,刘任任1,陈益强2,刘军发2,蒋鑫龙2,刘定俊1
(1.湘潭大学信息工程学院,湖南 湘潭 411105;2.中国科学院计算技术研究所,北京 100190)
针对传统的基于WIFI信号的室内定位方法难以有效解决环境动态变化对RSSI值的影响问题,设计并实现了一种基于WIFI射频信号强度指纹的室内定位方法。该方法通过采用一种基于用户使用状况与布置定位参考点的方法来动态更新系统的WIFI指纹数据库,从而有效降低了在实际使用过程中用户手持手机的方向、用户的身体遮挡以及使用环境的动态变化对RSSI值所带来的影响。实验结果表明,本文设计并实现的定位方法比传统定位方法更稳定、易维护,同时也具有更高的定位精度和自适应性。
室内定位;位置指纹;WLAN;自适应性
随着室内定位应用需求的不断增长,室内定位导航已经成为一个受欢迎的研究热点[1-2]。同时,室内无线定位系统在人们的日常生活中具有非常重要的作用,例如:在超市购物过程中,对消费者位置的定位将大大提高超市的导购水平,提升顾客的消费体验;在监狱环境中,及时准确地掌握相关人员的位置信息,有助于提高监狱的安全管理水平,简化监狱管理工作[3-4]。目前,室内无线定位系统主要采用红外、超声波、蓝牙[5-6]、RFID[7]、UWB[8-9]、WLAN[10-12]等短距离无线技术,其中,基于WIFI的室内无线定位系统因为具有抗干扰能力强、良好的网络稳定性、高速高质量的数据传输等特性,以及WIFI通讯模块在智能移动终端上的普遍采用,使得利用WIFI来进行室内无线定位变成一项低成本且容易实现的技术[13-14]。因此,对基于WIFI的室内无线定位技术进行深入研究具有非常重要的科研意义与工程价值。
现有的研究已经提出了许多基于WIFI信号的室内定位方法,比如,基于WIFI信号的到达时间差值TDOA(Time Difference of Arrival)、接收信号角度DOA(Direction Of Arrival)、接收信号相位POA(Phase Of Arrival)、 接收信号时间TOA(Time Of Arrival)等[15-16]。为减少WIFI接收设备的时钟偏差与多径问题,人们还提出了基于往返时延RTT(Round-Trip Time)的方法来改善TOA性能[17],但是在上述方法中,仍然存在较大定位等待时间和缺乏可扩展性等问题[18-19],同时,也难以获得各AP的准确坐标信息。为此,Sathyan等[20]提出了一种使用TOA的无线传感器网络定位系统,其室内定位精度可达0.5 m,但构建该平台需要特殊硬件支持。此外,由于TOA、TDOA和DOA技术都很难使用现有WIFI设备进行测量,而无线信号信噪比(SNR)和无线信号接收强度指示(RSSI)测量起来相对容易,因此RSSI在基于WIFI的室内定位系统中被广泛采用。根据对接收信号的处理,又主要可分为三角定位法[21-22]与位置指纹法[23]。其中,三角定位法将接收到的信号根据选定的信道衰减模型来估算用户设备到AP的距离,因此,若能获得用户设备到3个及以上不同AP的距离就能计算出该用户设备的位置。然而在室内环境中,无线信号很容易被人体、家具及墙壁等遮挡,所以三角定位法很难保证定位精度与系统稳定性[24]。为此,为了改善基于WIFI信号的定位系统的性能,Evennou和Marx[25]提出了位置指纹法,其中,该方法分为两个阶段:一是训练阶段,该阶段主要用于建立选定区域的RSSI指纹数据库,为此该阶段非常耗计算资源、人力资源及时间;二是定位阶段,该阶段通过比较用户终端与数据库中的RSSI指纹来估计用户终端的位置,因此,定位精度很大程度取决于RSSI指纹数据库的质量。然而,RSSI的测量值会受到很多因素的影响,通常,随着时间的推移和环境动态变化,可能导致用户终端的RSSI采样与RSSI指纹数据库的明显失配,虽然,目前有人提出了使用过滤器来消除RSSI随时间波动的方法[26],但已有调查和实验表明,该种方法仍然难以解决环境的动态变化(例如:室内环境中家具位置的变动等)对RSSI值的影响[27]。
为了有效解决环境动态变化对RSSI值的影响,本文设计并实现了一种基于WIFI射频信号指纹的新室内定位系统。在该系统中,综合考虑了使用过程中家具位置、人流、使用者身体的遮挡以及无线网络环境变化等影响RSSI值的多种主要因素,比如:货架的增减及其摆放位置的变更;不同尺寸、材质的产品随季节、市场需求的调整;不同季节、每天不同时间段内人流量在不同商品区域内的变化;提出了一种在用户使用过程中根据环境变化不断自动调整维护位置指纹数据库的新方法,在该方法中,用户在使用过程中不仅作为定位服务的使用者,同时也是定位系统的维护者,由此有效降低了在实际使用过程中用户手持手机的方向、用户的身体遮挡以及使用环境的动态变化对RSSI值所带来的影响。最后,通过大量仿真实验,实验结果表明,本文提出的新方法相较传统单纯使用滤波器和INS(integration of Inertial Navigation System)的方法[11]在定位准确率与稳定性方面都有较大提高。
本文的组织如下:第1节介绍了当前基于WIFI的定位算法;第2节介绍了我们的定位算法;第3节为实验部分;第4节对全文进行了一个总结以及对未来工作的一些展望。
1 相关工作
基于WIFI信号的室内定位系统以其高精度、高可靠、低能耗、低成本正成为人们的研究热点,目前,基于WIFI信号的室内定位方法主要可分为三角定位法及位置指纹法,其中三角定位算法主要是通过利用待测目标到至少3个已知参考点之间的距离信息来估算目标的位置,而位置指纹识别则是通过将目标定位节点的位置指纹特征与位置指纹特征数据库进行匹配来估算目标的位置。
1.1 三角定位算法
在该方法中,待测点首先接收来自3个不同已知位置AP的RSSI,然后依照无线信号的传输损耗模型将其转换成待测目标到相应AP的距离表示为da、db、dc。常用的传播路径损耗模型有:自由空间传播模型、对数距离路径损耗模型、哈它模型、对数-常态分布模型等[27-29]。分别以已知位置的3个AP为圆心表示为A、B、C,以其各自到待测点的距离为半径做圆,所得3个圆的交点,如图1所示。
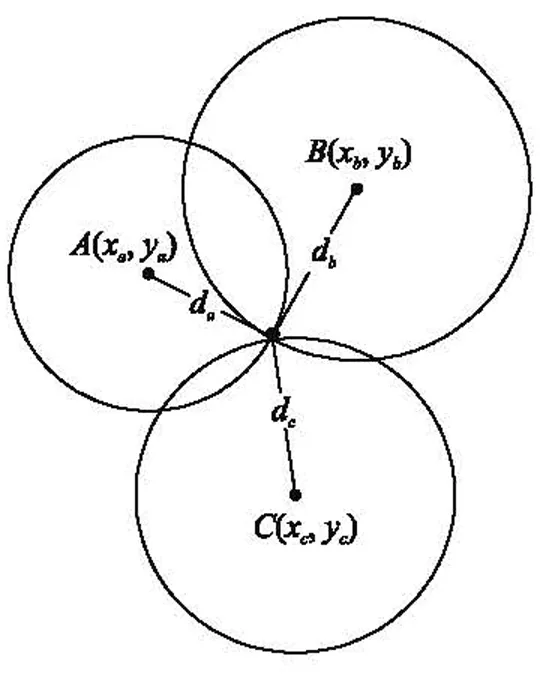
图1 待测点与3个不同已知位置AP的示意图
根据二维空间距离计算公式,可以获得一个非线性方程组:
(1)
采用线性化方法来求解,可以得到待定位置节点的坐标为:
(2)
由此,代入已知的A、B、C 3个AP的坐标(xa,ya)、(xb,yb)、(xc,yc),再选择适当的传播路径损耗模型,通过O点接收到A、B、C 3个AP的信号强度计算出da、db、dc并代入式(2)即可计算出O点的估算坐标。
1.2 位置指纹算法
与通常意义上的指纹识别类似,位置指纹识别主要是依靠表征目标特征的数据库来进行识别,其定位过程主要分为训练与定位两个阶段。
1.2.1 训练阶段
该阶段的主要目标是要建立一个位置指纹数据库。首先,选择合理的参考点分布,确保能为定位阶段的准确位置估计提供足够的信息。接着依次在各参考点测量来自不同AP的RSSI值,连同相应的MAC地址与参考点的位置信息记录在数据库中,直至遍历所选区域内所有的参考点。由于受环境影响,无线信号强度并不稳定,为了克服RSSI不稳定对定位的影响,通常在每个参考点上多次测量取平均[30]。
1.2.2 定位阶段
在该阶段,为了估算测试节点的坐标,主要是需要选用匹配算法。常用的匹配算法有最近邻法NN(Nearest Neighbor)、KNN(K-Nearest Neighbors)、神经网络等。以采用NN算法为例,其定位原理如下:设待测点接收的RSSI观测值为s=[s1,s2,…,sn],数据库中的已有记录为S=[S1,S2,…,SNi],其中n代表待测点上检测到的不同AP数;i∈[1,Nr],Nr为数据库中的记录数;Ni代表第i条记录中存储的不同AP数,则基于NN的目标节点距离估算方法可表示为下述形式:
L=argminj∈[1,Nr]‖s-Sj‖
(3)
式中:‖s-Sj‖代表s和Sj之间的欧式距离。然而,在位置指纹识别方法的使用过程中,指纹数据采样时的误差,后期使用时环境因素的变化,以及使用者个人因素等都会导致定位精度出现偏差。
1.3 测试及发现
基于三角定位方法的WIFI定位很大程度上依赖于确知的AP位置信息及准确的信号传输损耗模型。然而,由于涉及隐私、测量有难度及AP分布的随机性等原因,获知所有AP的位置信息并不现实。此外,由于影响信号传输的因素很多,不同环境下的信号传输损耗模型大不相同,建立一个准确的、适合实际应用的损耗模型存在着很大的困难,同时测量的误差也可能导致估算方程无解。因此,基于三角形算法的无线定位在具体实施中困难重重。
相比三角定位算法,基于位置指纹的定位算法有以下优势:①无需知道AP的位置;②无需使用信道模型;③固定物件的遮挡和信号的折射反射不会对定位结果产生不利影响;因此,本文采用基于位置指纹的定位方法。然而,传统的位置指纹算法会受到固定物件的位置变动、本身位置角度不固定的物件、使用者身体及人流等因素的影响,其定位精度会随着运行时间的变长而降低,并会随着使用身体角度的变换而容易产生定位点漂移现象。
下面通过一个简单的对比实验来阐述使用者手持设备的朝向对定位的影响。在如图2所示的实验场景中:测试者首先将手机握持于胸前,有一个无线接入点位于测试者的正前方,将此时测试者所处角度设定为0°,然后,测试者手持手机沿顺时针方向旋转一周,在该过程中,手机接收到的无线接入点信号强度值如图3中的实线所示。接下来,再将手机放置于与人手持等高的旋转平台之上,同样旋转一周,所得曲线如图3中的虚线所示[31]。
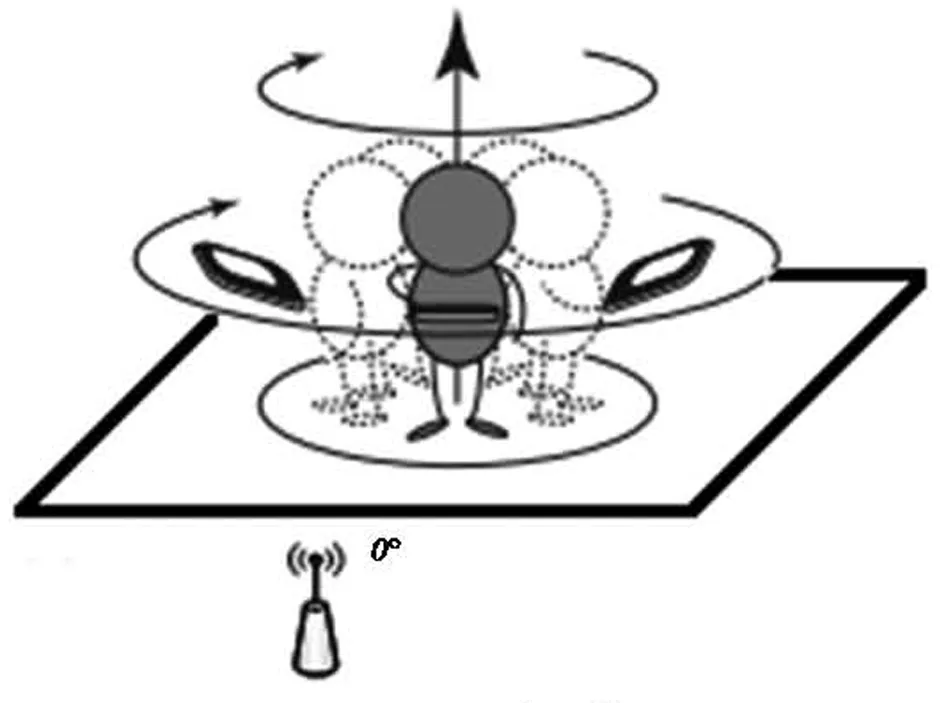
图2 测试场景示意图
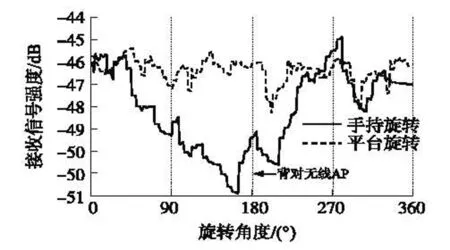
图3 测试结果
由实验结果可见,在同一位置不同角度,手机所接收到的无线接入点信号强度值不同,且背对接入点时(如图3中横坐标为180处附近所示)达到最低。在后续的多次重复试验中,我们均得到了相同的结果,因此,证明测试者身体的阻挡对无线信号具有明显的衰减作用。
2 算法原理及方案
本文设计并实现的室内定位系统组成如图4所示,主要包括3类设备:智能手机终端、无线接入点(AP,WirelessAccessPoint)、服务器。根据功能,服务器又可分为数据采集处理服务器、数据库服务器、地图导航服务器。
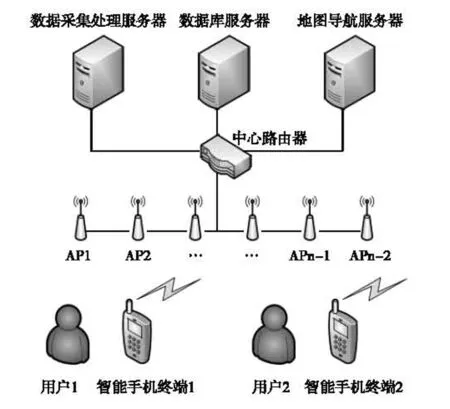
图4 本文设计并实现的新室内定位系统架构
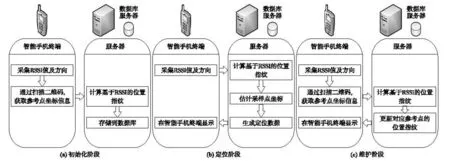
图5 本文给出的新室内定位系统的实现阶段
智能手机终端:即移动设备(如笔记本、智能手机等)主要用于采集定位所需的相关信息,如周边AP的无线信号强度、设备的朝向等,在指纹数据初始化阶段用于参考点数据收集,在定位阶段用于收集用户所处位置的信息,向服务器请求定位结果数据并显示。
无线接入点(AP):即场所内的无线路由器,不仅用于提供客户端采集所需的无线信号数据,同时为客户端与服务器连接提供数据通路。
服务器:主要包括数据采集处理服务器、数据库服务器、地图导航服务器,它们协同工作,处理来自客户端的定位请求,数据采集处理服务器用于提取位置特征数据,比对数据库服务器中的数据后,将定位结果传送给地图导航服务器,由它将合成了定位结果及地图数据的结果数据反馈给客户终端。
该定位系统的实现可以分为3个阶段:初始化阶段(图5(a))、定位阶段(图5(b))及运行维护阶段(图5(c))。
初始化阶段:首先,我们将需要定位的区域划分为若干相同大小的方格,将这些方格的交点作为定位系统的参考点,按照一定规则对参考点进行编号,并根据编号将参考点编号二维码粘贴在相应的参考点的位置。然后,测试者遍历各个参考点,在每个参考点分别在参考点位置持手机旋转一周并扫描该点的二维码,获取的数据将传输到服务器根据我们的算法进行位置指纹特征提取。
定位阶段:测试者在定位区域通过我们的定位APP请求定位时,智能手机终端将采集测试者当前位置的无线信号数据及手机朝向信息并发送至远端服务器,服务器将收到的数据进行处理后与数据库中的各点位置指纹特征进行比较,估计测试者当前的位置并将定位结果反馈给测试者的智能手机终端。
运行维护阶段:系统使用一段时间后会因为环境的变动而产生误差,然而我们的定位系统中通过用户的参与可实现系统的自行矫正,当系统出现较大误差时用户可以通过扫描粘贴于地板上的标记二维码来进行定位,这时手机终端会收集当前位置的无线信号数据、手机朝向信息及位置点坐标并发送至远端服务器,服务器根据这些信息提取位置指纹特征,并更新相依参考点该方向的位置指纹数据库记录。
2.1 初始化阶段
假定智能手机在一次无线信号采样所得到的采集向量为I=
Step 1:定义智能手机终端的采样无线信号的周期为T,通常T取1.0 s。首先,测试者手持智能手机终端遍历所有参考点,在各参考点执行如下操作:在参考点位置,原地匀速旋转360°。设终端一次采样收集到的数据为RI={I(1),I(2),…,I(Tr)},Tr=2π·T·Nc/β,其中β(rad)是对旋转角度进行区间划分,Nc是每个区间划分中的采样次数,通常,令β=π/10、Nc=9。然后,测试者扫描当前参考点处的二维码,得到坐标P(m)=(x(m),y(m),z(m)),其中m表示参考点的编号。最后,将
Step 2:数据采集处理服务器构造向量DI(k)={I(k,j)=I(i)|(k-1)·β≤d≤k·β,d为向量I(i)的d分量,i∈[1,Tr]},其中k∈[1,2π/β],j∈[1,Nc],Nc表示DI(k)的元素个数,Tr表示RI的元素数目,于是第k个区间的WIFI指纹可定义为:
DB(m,k)=
(4)
式中:B(m,k)是DI(k)中所有的BSSID列表,V(m,k)是DI(k)中B(m,k)列表对应的BSSID接收信号强度的平均值,W(m,k)是V(mk)中各BSSID接收信号强度的归一化比率。
Step 3:对任一参考点,其位置指纹数据可定义为PDB(m)=
基于图3中给出的两组数据,分别按照文献[11]中给出的位置指纹算法和上述本文提出的新算法进行位置指纹特征提取处理,结果如图6所示。其中,虚线为采用传统位置指纹算法得到的结果,显然,传统位置指纹算法仅仅简单地对信号值进行了采样平均;而柱状图为采用本文提出的上述算法得到的结果,显然,该算法可对用户的不同角度进行合理的区间划分,既忽略了一些小细节减小了特征库的大小,同时又保留了重要的特征信息。
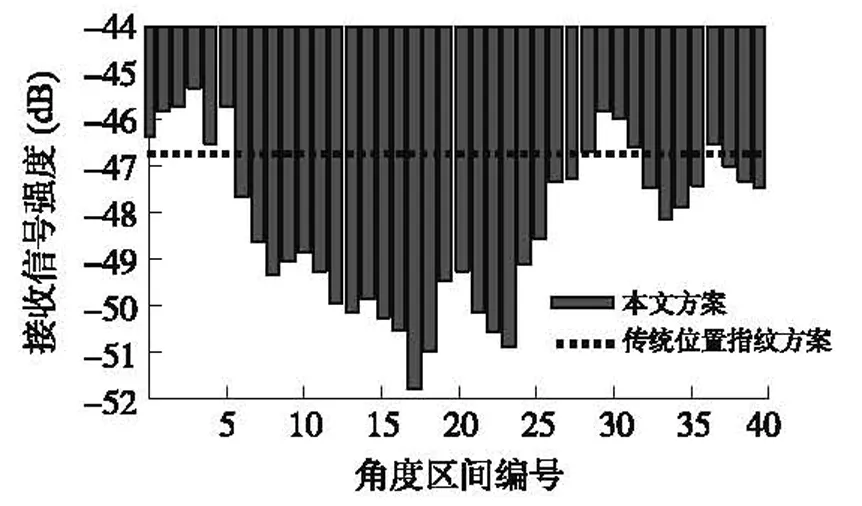
图6 文献[11]中算法和本文提出的算法提取的位置指纹特征对比
2.2 定位阶段
在该阶段,智能手机终端负责采样WIFI信号及手机朝向信息并将采集得到的数据发送给数据采集处理服务器,数据采集处理服务器负责提取出位置特征及手机朝向所属方向区间,与所有参考点在相同方向区间的特征数据库进行匹配,从而估算出智能手机终端位置坐标。地图导航服务器将定位结果及相关信息发送给智能手机终端,具体步骤如下:
Step 1:当测试者请求定位时,智能手机终端采样当前位置的采集向量PRI={I(1),I(2),…,I(Tl)},其中,这里取Tl=6,I(i)的d分量满足(k-1)·β≤d≤k·β,k∈[1,2π/β],0≤i≤Tl。将PRI通过WLAN发送至数据采集处理服务器。
Step 2:数据采集处理服务器根据接收到的PRI,提取的位置指纹体征可表示为:
DPDB=
(5)
式中:B是PRI中所有的BSSID列表,V是PRI中B列表对应的BSSID接收信号强度的平均值。
Step 3:计算PDB与数据库服务器中第m个参考点在k方向区间的特征数据DB(m,k)匹配度:
(6)
式中:Δvaluet=|DB(m,k)·V(t)-PDB·V(t)|,
DB(m,k)·W(t)=1/Tv×DB(m,k)·V(t)×
式中:Tv表示DB(m,k)中B分量内的元素个数,DB(m,k)·V(t)表示编号为m的参考点的第k个方向区间里的第t个信号强度分量,DB(m,k)·W(t)表示编号为m的参考点的第k个方向区间里的第t个权重分量。同样的方法我们可以得到PDB与其余各参考点的匹配度,选取具有最大匹配度的参考点作为估算结果并发送给地图导航服务器,定位结果经地图导航服务器处理后反馈给智能手机终端。
通过采样15个连续位置点并根据传统算法及本文提出的算法生成位置指纹特征库,然后,在第8个点处依次在0°,90°,180°,270°进行定位采样,再分别根据文献[11]中算法及本文提出的算法生成本次采样特征,最后,分别与相应的指纹特征库中的点依次进行匹配,本文提出的匹配算法得到的结果如图7所示,文献[11]中算法得到的结果如图8所示。
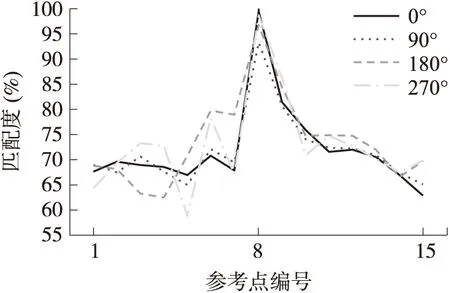
图7 本文给出的算法得到的结果
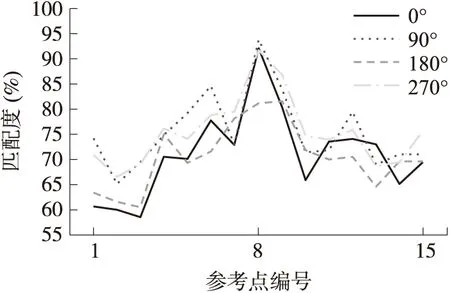
图8 文献[11]中算法得到的结果
通过以上试验结果可以看出:本文提出的新算法在各个方位上都正确地得到了匹配结果,而且匹配结果非常显著,而采用文献[11]中的算法则不仅在180°的曲线中有一次匹配错误,而且匹配结果也不是很显著。此外,我们还重复进行上述实验步骤,依次测试了其他定位点的数据,得到的定位成功率及匹配度的方差值的平均值如表1所示。由此可知:本文提出的新算法不仅具有较高的匹配度,而且还与其他点的匹配度相差显著。

表1 本文算法与文献[11]中算法的定位成功率及匹配度的方差平均值
2.3 维护阶段
在定位系统的使用过程中环境的动态变化,如室内物件位置摆放的变化、个别AP的失效或加入都影响着WIFI定位的精度,传统的定位系统只有通过对系统进行定期的重复初始化来维持定位的准确性,然而,在我们设计的定位系统中,将广泛用于移动终端设备交换信息的二维码应用到定位系统中,智能手机终端可以通过主动扫描定位区域内参考点处的二维码来定位当前的位置,于此同时手机将采集当前参考点的无线信号信息并发送至数据采集处理服务器,用于数据库中位置指纹特征的更新,详细的步骤如下:
Step 1:测试者扫描参考点二维码获取参考点坐标为P(m)=(x(m),y(m),z(m)),此时手机获得定位。接着,智能手机终端采样当前位置的采集向量MRI={I(1),I(2),…,I(Tl)},其中,这里取Tl=6,I(i)的d分量满足(k-1)·β≤d≤k·β,k∈[1,2π/β],0≤i≤Tl。最后,将
Step 2:数据采集处理服务器根据接收到的
式中:Δvaluet=|DB(m,k)·V(t)-PDB·V(t)|,DB(m,k)·V(t)表示编号为m的参考点的第k个方向区间里的第t个信号强度分量,DB(m,k)·W(t)表示编号为m的参考点的第k个方向区间里的第t个权重分量,当Mm∈[MIN,MAX]时用DMDB替换DB(m,k),这里MIN、MAX根据测试经验数据分别为20及60。
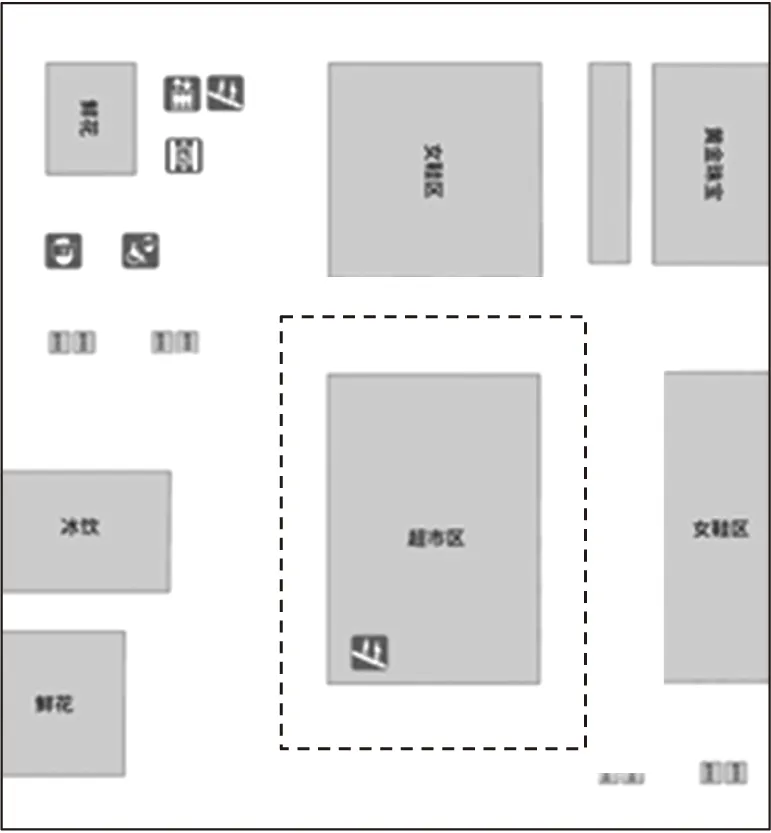
图9 实验场景
3 实验对比
首先,在某商城中选取一块矩形区域S如图9虚线区域所示,其大小为42 m×36 m,将区域S等距d=3 m划分为12×10的方格区域集,该商场的地板大小为1 m×1 m,可见每两块相隔两块地板的地砖的中心距离为3 m,在这样的地板砖上布置标记该位置的二维码如图10所示。
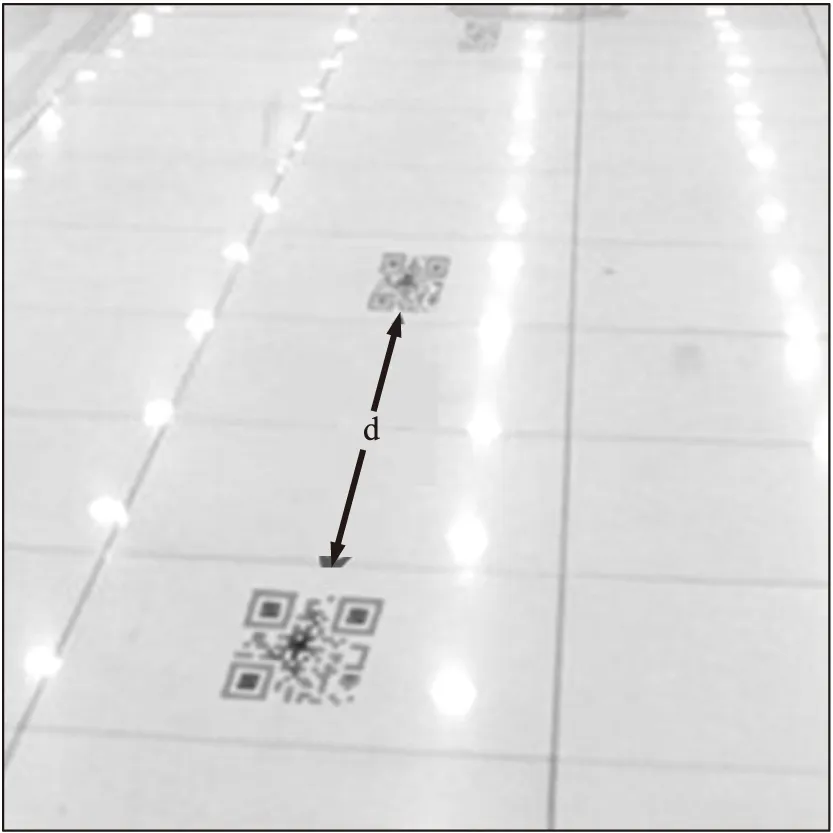
图10 二维码布置
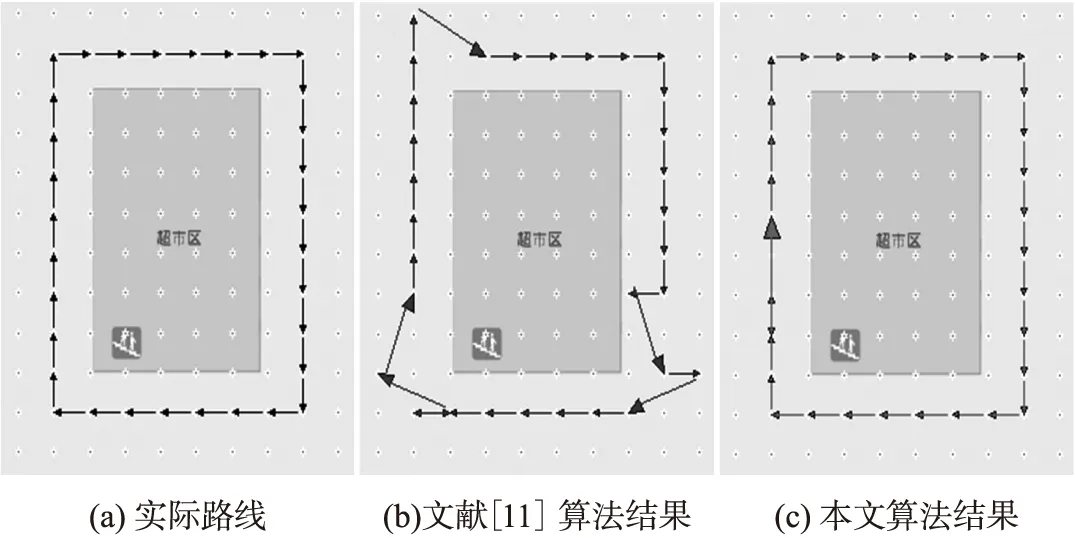
图12 实际行走路线及根据两种定位方案所绘制的行程路线
然后,分别根据普通的WIFI定位算法和我们的算法对系统进行初始化,在各二维码标记点处采集初始化所需的数据,并上传至各自的服务器端进行位置指纹提取,建立各标记点位置指纹数据库。接着,我们选取商场休业的时间段,手持智能手机由图11所示气泡位置,沿箭头所示方向环绕S区域一周,在途径的二维码标记点向运行两种算法的两台服务器分别请求定位并记录返回的定位结果,同时扫描该标记点的二维码一同存储,这样在一次行走过程中我们得到了到各点两种定位算法的定位结果及二维码。根据记录的行程数据可分别根据二维码记录、定位算法定位的结果绘制出3条行程路线,如图12(a)黑色线条为通过二维码扫描得到的实际行程路线,如图12(b)有向线条为通过采用文献[11]中的WIFI定位算法定位所得的行走路线,如图12(c)有向线条为通过本文提出的定位算法所得的行走路线。
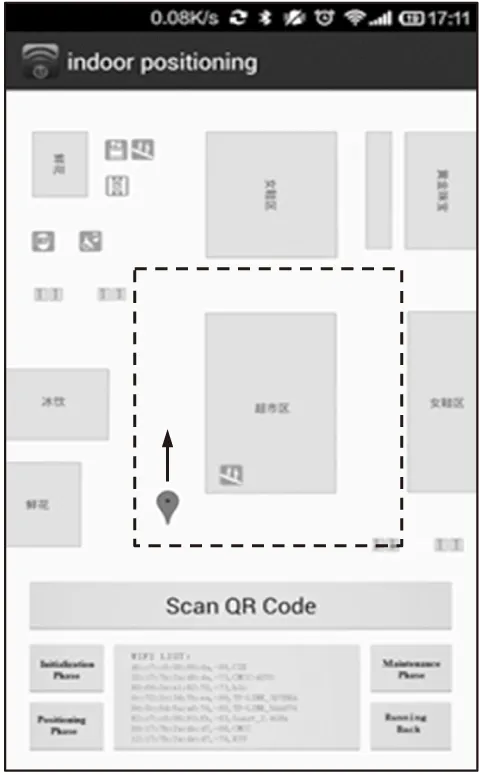
图11 实验过程示意
在图12中,粗箭头表示前后两次定位结果距离较远,双向箭头是由于后次定位结果与前次定位结果相同,不规则的折线箭头表示定位结果偏离,可见这3类箭头的出现都表示定位结果有误差。根据上面的试验结果可见:文献[11]中给出的定位算法在拐角处定位误差较大,而本文提出的算法则基本没有较大的偏差。
此外,我们还选取在每天人流量较大的时段重复进行了上述试验,结果如图13和图14所示。
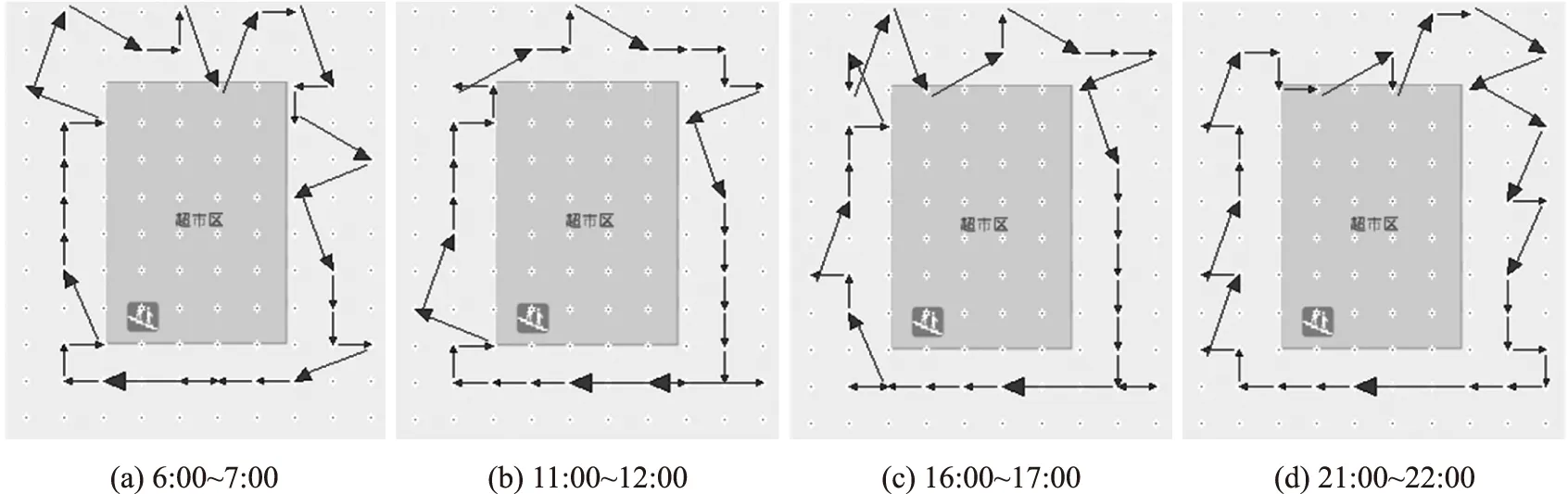
图13 文献[11]中给出的定位算法在不同时段得到的行走路线
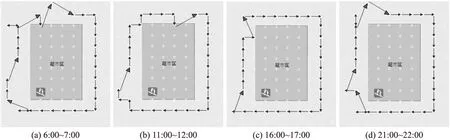
图14 本文提出的定位算法在不同时段得到的行走路线
对比图13和图14的实验结果可发现人流量对定位算法有两方面的显著干扰,一是人群的移动对WIFI信号有一定的遮挡效应,特别在人流量比较集中的电梯、楼梯、商场入口及热门店面等人员聚集处,文献[11]算法在这些地方的定位出现较大的偏差,在其他非热点区域则表现较为稳定;二是随着超市中人流量的增加,WIFI网络拥塞误码率提高,使得定位结果有一定延时和误差。由此可见:文献[11]中给出的定位算法由于人流的原因定位精度受到较大干扰,而本文提出的算法则表现出较好的抗干扰性。
最后,我们统计了在一个月内每天上述4个时间段内的平均值误差,本文提出的算法与文献[11]中给出的定位算法的定位误差随时间的变化曲线如图15所示。
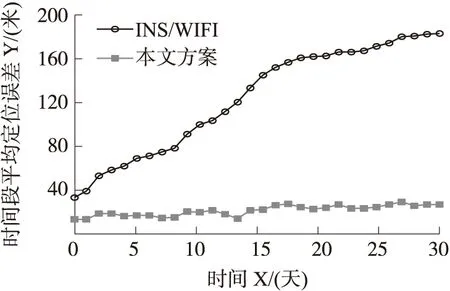
图15 本文提出的算法与文献[11]中给出的算法的定位误差随时间的变化情况
由图15易知,本文提出的算法的定位误差随时间变化情况要远小于文献[11]中给出的定位算法的定位误差随时间的变化情况,由此易知,相比文献[11]中给出的定位算法,本文提出的定位算法具有更好的稳定性。
4 结论
本文设计并实现了一种自适应动态环境、易实施的室内定位系统,该系统在实际运行过程中,可以通过用户的操作使用不断自动根据环境的变化来更新位置指纹数据库,从而能保持较高的定位准确率。实验结果表明,本文提出的新定位系统相比单纯采用滤波器的定位系统,不但具有更好的定位精度,而且还具有很好的可部署性与稳定性,因此,具有良好科研及实用前景。
在后续研究中,我们计划将RSSI滤波及传感器计步测距加入到本文算法中,进一步改善系统的定位性能。
[1] Vaughan-Nichols S J. Will Mobile Computing’s Future be Location,Location,Location?[J]. Computer,2009,42(2):14-17.
[2]Bellavista P,Kupper A,Helal S. Location-Based Services:Back to the Future[J]. Pervasive Computing,IEEE,2008,7(2):85-89.
[3]Fischer G,Dietrich B,Winkler F. Bluetooth Indoor Localization System[C]//Proceedings of the 1st Workshop on Positioning,Navigation and Communication. 2004.
[4]Kolodziej K W,Hjelm J. Local Positioning Systems:LBS Applications and Services[M]. CRC Press,2006.
[5]Altini M,Brunelli D,Farella E,et al. Bluetooth Indoor Localization with Multiple Neural Networks[C]//Wireless Pervasive Computing(ISWPC),2010 5th IEEE International Symposium on. IEEE,2010:295-300.
[6]Fischer G,Dietrich B,Winkler F. Bluetooth Indoor Localization System[C]//Proceedings of the 1st Workshop on Positioning,Navigation and Communication. 2004.
[7]Chumkamon S,Tuvaphanthaphiphat P,Keeratiwintakorn P. A Blind Navigation System Using RFID for Indoor Environments[C]//Electrical Engineering/Electronics,Computer,Telecommunications and Information Technology,2008. ECTI-CON 2008. 5th International Conference on. IEEE,2008,2:765-768.
[8]Gigl T,Janssen G J M,Dizdarevic V,et al. Analysis of a UWB Indoor Positioning System Based on Received Signal Strength[C]//Positioning,Navigation and Communication,2007. WPNC’07. 4th Workshop on. IEEE,2007:97-101.
[9]Ingram S J,Harmer D,Quinlan M. Ultrawideband Indoor Positioning Systems and Their Use in Emergencies[C]//Position Location and Navigation Symposium,2004. PLANS 2004. IEEE,2004:706-715.
[10]Li B,Salter J,Dempster A G,et al. Indoor Positioning Techniques Based on Wireless LAN[C]//2006 Auswireless Conference,Mar. 2007:12.
[11]Atia M M,Noureldin A,Georgy J,et al. Bayesian Filtering Based WiFi/INS Integrated Navigation Solution for GPS-Denied Environments[J]. Navigation,2011,58(2):111-125.
[12]Gansemer S,Großmann U,Hakobyan S. Rssi-Based Euclidean Distance Algorithm for Indoor Positioning Adapted for the Use in Dynamically Changing WLAN Environments and Multi-Level Buildings[J]. Indoor Positioning and Indoor Navigation(IPIN),2010:1-6.
[13]Powell A. Wi-Fi as Public Utility or Public Park?Metaphors for Planning Local Communication Infrastructure[J]. Metaphors for Planning Local Communication Infrastructure(January 21,2009),2009.
[14]Afanasyev M,Chen T,Voelker G M,et al. Analysis of a Mixed-Use Urban Wifi Network:When Metropolitan Becomes Neapolitan[C]//Proceedings of the 8th ACM Sigcomm Conference on Internet Measurement. ACM,2008:85-98.
[15]Günther A,Hoene C. Measuring Round Trip Times to Determine the Distance between WLAN Nodes[M]//Networking 2005. Networking Technologies,Services,and Protocols;Performance of Computer and Communication Networks,Mobile and Wireless Communications Systems. Springer Berlin Heidelberg,2005:768-779.
[16]韩霜,罗海勇,陈颖,等. 基于TDOA的超声波室内定位系统的设计与实现[J]. 传感技术学报,2010,23(3):347-353.
[17]Hoene C,Willmann J. Four-Way TOA and Software-Based Trilateration of IEEE 802.11 Devices[C]//Personal,Indoor and Mobile Radio Communications,2008. PIMRC 2008. IEEE 19th International Symposium on. IEEE,2008:1-6.
[18]Llombart M,Ciurana M,Barcelo-Arroyo F. On the Scalability of a Novel WLAN Positioning System Based on Time of Arrival Measurements[C]//Positioning,Navigation and Communication,2008. WPNC 2008. 5th Workshop on. IEEE,2008:15-21.
[19]Ciurana M,Barcelo-Arroyo F,Llombart M. Improving the Performance of TOA over Wireless Systems to Track Mobile Targets[C]//Communications Workshops,2009. ICC Workshops 2009. IEEE International Conference on. IEEE,2009:1-6.
[20]Sathyan T,Humphrey D,Hedley M. WASP:A System and Algorithms for Accurate Radio Localization Using Low-Cost Hardware[J]. IEEE Transactions on Systems,Man and Cybernetics,Part C:Applications and Reviews,2011,41(2):211-222.
[21]Motley A J,Keenan J M P. Personal Communication Radio Coverage in Buildings at 900 MHz and 1700 MHz[J]. Electronics Letters,1988,24(12):763-764.
[22]Akyildiz I F,Sun Z,Vuran M C. Signal Propagation Techniques for Wireless Underground Communication Networks[J]. Physical Communication,2009,2(3):167-183.
[23]郭红成,罗海勇,尹浩,等. 基于线性插值和动态指纹补偿的分布式定位算法[J]. 传感技术学报,2009(12):1795-1801.
[24]Chen Y,Kobayashi H. Signal Strength Based Indoor Geolocation[C]//Communications,2002. ICC 2002. IEEE International Conference on. IEEE,2002,1:436-439.
[25]Youssef M A,Agrawala A,Udaya Shankar A. WLAN Location Determination via Clustering and Probability Distributions[C]//Pervasive Computing and Communications,2003.(PerCom 2003). Proceedings of the First IEEE International Conference on. IEEE,2003:143-150.
[26]Evennou F,Marx F. Advanced Integration of WiFi and Inertial Navigation Systems for Indoor Mobile Positioning[J]. Eurasip Journal on Applied Signal Processing,2006,2006:164-164.
[27]雷地球,罗海勇,刘晓明. 一种基于WiFi的室内定位系统设计与实现[C]//第六届和谐人机环境联合学术会议. 洛阳,2010: - .
[28]Wang H,Wan J,Liu R. A Novel Ranging Method Based on RSSI[J]. Energy Procedia,2011,12:230-235.
[29]Zheng J,Wu C,Chu H,et al. An Improved Rssi Measurement in Wireless Sensor Networks[J]. Procedia Engineering,2011,15:876-880.
[30]Wang C L,Chiou Y S,Yeh S C. An Indoor Location Scheme Based on Wireless Local Area Networks[C]//Consumer Communications and Networking Conference,2005. CCNC. 2005 Second IEEE. IEEE,2005:602-604.
[31]Zhang Z,Zhou X,Zhang W,et al. I am the Antenna:Accurate Outdoor ap Location Using Smartphones[C]//Proceedings of the 17th Annual International Conference on Mobile Computing and Networking. ACM,2011:109-120.
WiFi Fingerprint Based Self-Adaptive Indoor localization in The Dynamic Environment*
CHENBintao1*,LIURenren1,CHENYiqiang2,LIUJunfa2,JIANGXinlong2,LIUDingjun1
(1.College of Information Engineering,Xiangtan University,Xiangtan Hu’nan 411105,China;2.Institute of Computing Technology,Chinese Academy of Sciences,Beijing 100190,China)
Aiming at solve the problem that traditional indoor positioning methods based on WIFI cannot eliminate the impacts to RSSI caused by dynamic variation of the environment effectively,this paper proposes a new indoor positioning system which is based on WIFI fingerprint. This new system adopts a new method based on the Usage of People(UOP)and deployment of Reference Point Tags(RPT)to update the database of WIFI fingerprints dynamically,and the impacts to RSSI caused by different orientation of mobiles,the user’s body,and dynamical changes of the environment in actual use process are declined effectively. The simulation results show that,comparing with traditional indoor positioning methods,the new indoor positioning methods proposed in this paper is more stable,easier to maintain,and simultaneously,has better positioning accuracy and adaptation.
indoor positioning;WI-FI fingerprint;wireless LAN;daptation

陈斌涛(1987-),男,湖南邵阳人,湘潭大学信息工程学院硕士,研究方向为无线传感器网络、无线定位、嵌入式系统等,hansewolf@gmail.com;

刘任任(1959-),男,湖南醴陵人,中共党员,博士,教授,湘潭大学信息工程学院院长,主要研究方向为多值逻辑、信息安全等;

陈益强(1973-),男,博士,中国科学院计算技术研究所研究员,主要研究方向为普适计算、智能人机交互、数据挖掘、机器学习等;

刘军发(1973-),男,博士,中国科学院计算技术研究所副研究员,主要研究方向为普适计算、虚拟现实、数据挖掘等;
蒋鑫龙(1988-),男,博士,中国科学院大学、中国科学院计算技术研究所,主要研究方向为普适计算、虚拟现实、无线定位等;

刘定俊(1991-),男,湘潭大学信息工程学院硕士,研究方向为无线定位、普适计算等。
项目来源:国家自然科学基金项目(61173066)
2014-12-20 修改日期:2015-01-31
C:7230
10.3969/j.issn.1004-1699.2015.05.020
TP391
A
1004-1699(2015)05-0729-10
猜你喜欢
红领巾·萌芽(2022年9期)2022-11-24 05:55:58
小哥白尼(趣味科学)(2021年11期)2021-02-28 08:35:00
小天使·一年级语数英综合(2020年10期)2020-12-16 02:57:11
金属加工(冷加工)(2020年11期)2020-11-24 08:58:20
英语文摘(2020年5期)2020-09-21 09:26:30
测控技术(2018年5期)2018-12-09 09:04:24
趣味(语文)(2018年8期)2018-11-15 08:53:00
精密制造与自动化(2018年1期)2018-04-12 07:42:50
自动化学报(2016年8期)2016-04-16 03:39:00
设备管理与维修(2016年5期)2016-03-16 02:20:46