基于E-Wind Turbine 实验平台的风力发电控制系统
2015-05-08 06:07赵艳华
实验技术与管理 2015年7期
高 哲, 汪 沛, 赵艳华, 刘 婷
(辽宁大学 轻型产业学院, 辽宁 沈阳 110036)
基于E-Wind Turbine 实验平台的风力发电控制系统
高 哲, 汪 沛, 赵艳华, 刘 婷
(辽宁大学 轻型产业学院, 辽宁 沈阳 110036)
风力发电系统具有规模大、实际现场培训成本高、危险系数高等特点,因此基于风力发电仿真设备的风力发电控制研究是十分必要的。以E-Wind Turbine实验平台为例,详细介绍了变速、变桨距双馈风力发电系统实验平台的构成与控制策略的实现方法。基于S7-1200系列的PLC控制器,利用PORTAL STEP 7集成开发环境,实现了风机的偏航、转速控制以及功率控制。仿真实验结果表明,设计的风力发电控制系统可以有效地模拟实际风力发电机的各种控制要求,为风力发电控制策略的研究提供了一种有效手段。
双馈风力发电系统; E-Wind Turbine实验平台; 变速变桨距; S7-1200系列PLC
随着煤、石油等常规能源的减少及其带来的环境污染等问题,可再生能源的开发和利用受到世界各国的高度重视[1]。风能是具有可大规模开发利用的可再生能源之一,且我国的风能资源极其丰富,风能的开发利用潜力非常大[2]。在风能的利用中,最完善的方案就是把风能转换成电能,风力发电已经成为对常规能源最具竞争力的新能源发电方式[3]。
从世界范围看,欧洲和北美在风力发电方面处于世界领先地位。截止2012年底,全球风力发电机容量已达282 587 MW[4]。从新装机容量来看,丹麦维斯塔斯公司、西班牙Gemesa公司、德国Enercon公司、美国通用电气公司和德国西门子公司位列前5名[5]。我国的风力发电技术也日趋成熟,为了进一步提高风能利用率及风力发电效益,大容量风力发电机及海上风电场发电技术得以迅速发展[6]。
我国在风电机组系统设计技术的研究方面还十分薄弱,对于风电机组变桨距控制、变速恒频等先进的风电技术的了解也不够全面,因而,建立模拟实验平台对于深入研究风力发电机组设计与开发和持久开发风能具有重要的理论意义和指导说明作用[7]。本文主要介绍由西门子公司设计研发的E-Wind Turbine风力发电控制系统实验平台,详细介绍这套模拟设备的硬件组成、系统编程,及监控软件和上位机与下位机通信方式的连接。
目前,世界各地的风电场的风电机组大多数是恒速运行机组,而随着现代电力电子技术的发展,采用变速恒频风力发电技术,通过静止变换器给转子提供低频交流励磁的双馈异步发电机系统,以其优良的调节特性、稳定性、高效性以及具有深度进相运行能力而受到人们的重视,并得到广泛发展。为了更加真实、有效地发挥E-Wind Turbine实验平台的优势,本文以变速变桨距风力发电机为研究对象,模拟风机的启动、偏航、转速和功率控制以及停机等完整流程,以便使用者能够熟练操作E-Wind Turbine实验设备,实现综合设计、创新探索的目标。
1 风力发电系统仿真基础
1.1 变速变桨距风力机组系统构成
变速风力发电机(以下简称风力机)组通常包含变速发电机、整流器、逆变器和变桨距机构。风力发电机组的总体结构示意图见图1。

图1 风力发电机结构示意图
变速变距型风力发电机组控制系统主要由主控制器、桨距调节器、功率控制器(转矩控制器)组成。主控制器主要完成机组运行逻辑控制,桨距调节器主要完成叶片桨距调节,功率控制器主要完成变速恒频控制。
变速发电机目前主要采用双馈异步发电机。双馈异步发电机由绕线转子异步发电机和在转子电路上带交流励磁变频器组成[8]。发电机向电网输出的功率由两部分组成:即直接从定子输出的功率和通过变频器从转子输出的功率。风力机的机械速度是允许随着风速而变化的[9]。
1.2 风力机气动理论
风轮的作用是将风能转换为机械能。由于流经风轮后的风速不可能为零,因此风所拥有的能量不可能完全被利用,只有风的一部分能量可以被吸收而成为桨叶的机械能。根据风能转换原理,风力发电机组的功率输出主要取决于风速[10]。风能的大小与气流密度和通过的面积成正比,与气流速度的立方成正比。
根据贝兹(Betz)理论,风力机的理论最大效率CPmax(或称理论风能利用系数)为0.593,其功率损失部分可以解释为留在尾流中的旋转动能[11]。能量的转换将导致功率的下降,它随所采用的风力机和发电机的型式而异,因此风力机的实际风能利用系数CP<0.593。风能利用系数CP是风力机从自然风能中吸取能量的大小度量。
风力机还有一个重要的特性系数——叶尖速比λ,为了表示风轮在不同风速中的状态,用叶片的叶尖圆周速度与风速之比来衡量,称为叶尖速比[12]。最佳叶尖速比会随风速变化,与风速之间呈现非线性关系。
2 E-Wind Turbine实验平台的设计与开发
2.1 风力发电仿真系统总体结构
图2是风力发电仿真系统的总体结构及相互位置关系。风力发电仿真系统主要是模拟风机发电的运行状态,通过数学公式的运算模拟风机的运行特性。模拟产生的风和风机的运行状态、参数经Profibus/Profinet工业总线,实时传送给编程逻辑器件PLC。Profibus-DP从站通信模块采用泗博PM-125,该通信模块主要有3个功能:通信连接情况诊断、数据实时监视、数据接收与发送,其在Profibus-DP总线上的地址一般设置为7。实时数据经过控制器运算,再将控制信号传送给风机模型。图3所示是连接PC机与风机模型的通信装置,从左到右依次为PM-125、电源、S7-1200PLC。使用者可以在PC机上通过编程来控制风机的运行,或者可以在触屏界面HMI中编写程序。为了便于使用者更好地控制和监测风力机运行情况,风力机界面以3D形式呈现,如下图4所示,位于界面中间的是风力机的侧视图,右上角是俯视图,其中红点代表风向,右下角是叶尖视图,在可以观察到风机桨距角的数值变化,其左右两侧分别是风速柱状图和输出功率柱状图,此外,界面最上方是选单(菜单)栏,这14个功能按钮包括文件操作、模型操作、控制方式选择、参数设置、通信和退出系统等。此仿真界面还可以实现场景漫游、观察风力机内部结构等操作。除此之外,仿真软件还带有自动评分系统,在风力机运行结束后,系统根据评分者事先输入的评分标准自动评分。
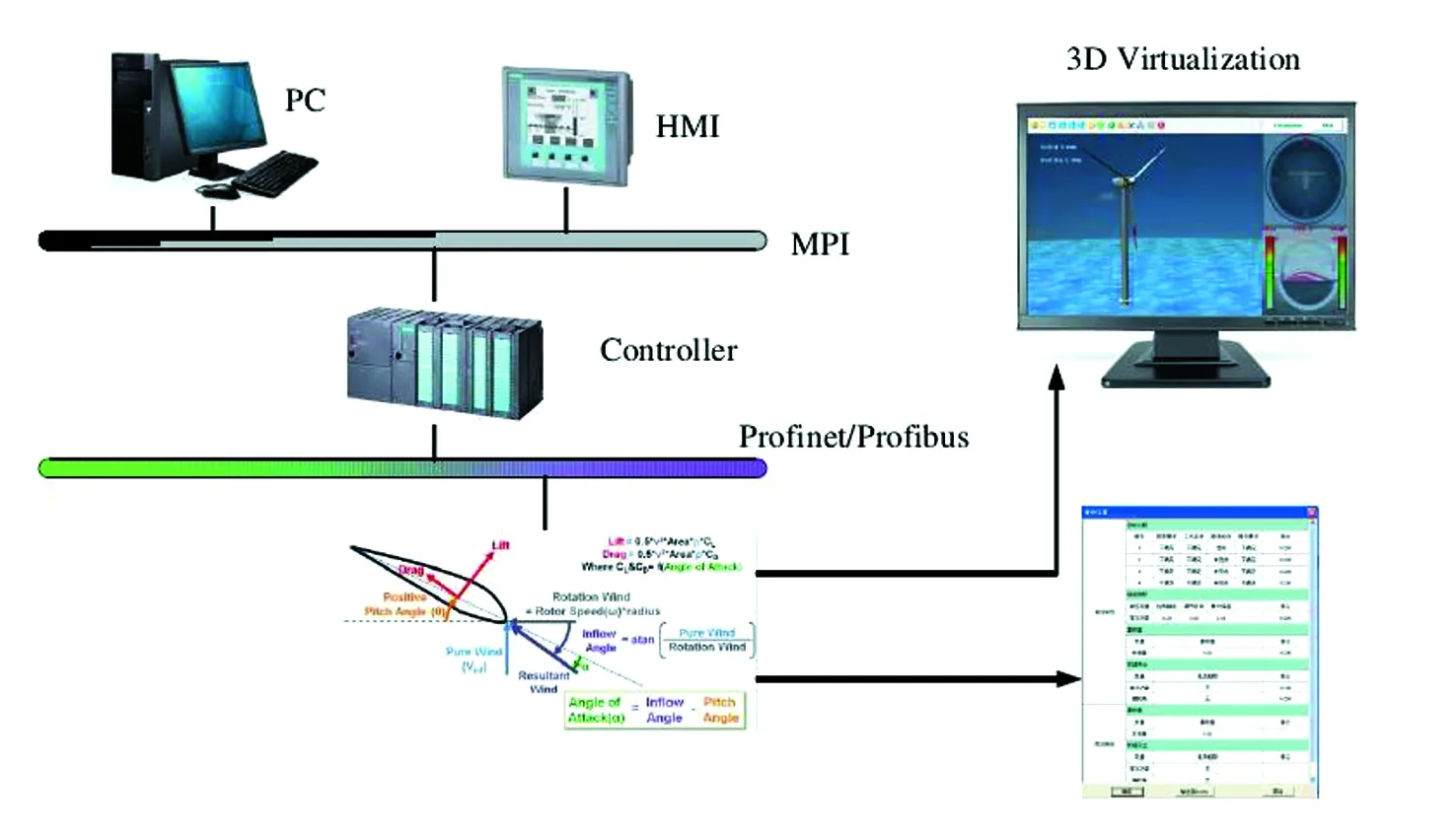
图2 风力发电仿真系统

图3 通信连接装置

图4 风力发电仿真软件主界面

图5 采集数据界面
2.2 Profibus-DP通信时的实时数据
(1) 数据的采集。通过Profibus采集风速、风向及风机运行状态等数据,并将数据传递给PLC。需要采集的数据见图5,其中包括数字量信号16个、模拟量信号32个。
(2) 控制信号的传递。PLC在经过运算后,通过控制信号控制风机的运行。风力机的控制信号界面见图6。控制信号包括数字量信号10个、模拟量信号7个。
3 风力发电机组的仿真实验
仿真实验针对变速变桨距风力发电机组,基于西门子S7-1200 PLC,使用西门子博途(TIA Portal)软件中的STEP 7 Professional V11和WINCC Professional V11完成控制程序的编写和监控画面的组态。
在编写主程序控制风机运行之前,要对控制器进行硬件组态,完成E-WT与PLC的硬件连接。硬件组态中包括型号为1214C DC/DC/DC的CPU和通信模块Profibus,将事先已安装在STEP 7中的PM-125模块与Profibus通信模块相连,再对PM-125进行地址配置和IO配置;然后以梯形图的形式完成通信程序的编写,最后将程序下载到设备,完成通信测试。
3.1 风力发电机组偏航控制
偏航主要有两个功能:一是使风轮跟踪变化稳定的风向,通过控制风轮的迎风面始终与风向垂直以实现最大限度捕获风能;二是当风力发电机组由于偏航作用,机舱内引出的电缆发生缠绕时,自动解除缠绕[13]。 风力发电机组无论处于运行状态还是待机状态,均要求能主动对风。偏航系统是一随动系统,当风向与风轮轴线偏离一个角度时,控制系统经过一段时间的确认后,会控制偏航电动机将风轮调整到与风向一致的方位。
偏航控制采用SCL语言编程,通过编写代码实现风机的偏航和解缆。根据实验要求,利用偏航角与风向角的差值,在-1 080°~1 080°范围里分为12种情况讨论,每180°为一种情况,通过判断偏航角与风向角的位置关系,控制风机顺时针还是逆时针偏航,并根据数学逻辑运算决定风机对准主风向后停止偏航的条件。值得注意的是,为了防止风机内部电缆线出现缠绕现象,若偏航角大于实验规定的3圈,则要进行解缆操作。
3.2 风力发电机组转速与功率控制
随着风速的变化,风力发电机组运行在不同的区域,各有不同的控制任务、不同的控制方法,图7清晰地表示了这些关系。图中OA为启动阶段,对发电机进行并网控制,发电机无功率输出;AB段为风能利用系数CP恒定区,机组随着风速作变速运行以追踪最大风能;BC段为转速恒定区,随着风速增大,转速保持恒定,功率将增大;CD段为功率恒定区,随着风速增大,控制转速迅速下降以保持恒定的功率输出。

图7 风速与功率的关系曲线
根据交流励磁变速恒频风力发电机组的运行区域,可将运行控制策略确定为:低于额定风速时,实行最大风能追踪控制或转速控制,以获得最大的能量或控制机组转速;高于额定风速时,实行功率控制,保持输出稳定。
4 风力发电机组的仿真结果与分析
4.1 风力发电机转速控制
图8是风力机对准主风向后,当发电机转速达到1 000 r/min,即到达并网条件后对风机的控制曲线。曲线是在基本风速为14 m/s、加入风向和风速干扰的条件下采用PI控制器测得的。
图8(a)中曲线的比例增益为0.01,积分时间为1 000 s。从图8(a)中可以看出,曲线的超调量并不大,能够较快地接近设定值并趋于稳定,是较为理想的PI曲线;图8(b)中曲线的比例增益为0.5,积分时间为1 000 s,即只增大比例增益,从图8(b)中可以看出,与图8(a)相比,风机转速衰减的速率变大,系统反应加快,但曲线的超调量明显增大,控制效果品质变差;图8(c)中曲线的比例增益为0.01,积分时间为5 000 s,即只改变积分时间,图中曲线因为积分时间增大,较图8(a)超调量有所减少,但转速衰减的速率变小,调节时间变长,系统反应速度变慢。
4.2 风力发电机输出功率控制
图9是当风机转速大于1 500 r/min时风机的输出功率曲线。图9(a)中曲线的比例增益为0.6,积分时间为100 s。从图9(a)中可以看出,曲线在上升过程中有一定的超调量并能够平滑地衰减至设定值,最终趋于稳定;图9(b)中曲线的比例增益增加到1.8,积分时间不变,通过观察曲线可以看出,与图9(a)相比,曲线的上升时间有所减小,曲线衰减至设定值的时间变短,即增大比例增益后系统反应更加灵敏,调节速度加快;图9(c)中曲线的比例增益不变,积分时间增加到500 s,从图中可以看出,功率衰减的幅度变小,存在比较大的稳态误差,得到的功率曲线不理想。

图8 风机转速控制曲线

图9 风机输出功率控制曲线
5 结束语
本文主要介绍了由西门子公司设计研发的E-Wind Turbine风力发电控制系统实验平台,在详细介绍实验平台的设备组成及开发环境的基础上,以变速变桨距风力发电机为研究象,模拟了风机的启动、偏航、转速和功率控制等完整流程,实验结果表明,控制方案可行,控制结果良好。
References)
[1] 王鹏,王武,张元敏.风力发电仿真实验平台开发及应用[J].实验技术与管理,2012,29(4):81-82.
[2] 罗承先.世界风力发电现状与前景预测[J].中外能源,2012,17(3):24-25.
[3] 李军军,吴政球,谭勋琼,等.风力发电及其技术发展综述[J].电力
建设,2011,32(8):64.
[4] 袁明洋,冉庆行. 风力发电的应用现状及其在我国中部地区的推广研究[J]. 科技世界,2014(28):144-145.
[5] 赵勇强,李俊峰,许洪华.风力发电技术发展状况与趋势分析[J].中国科技产业,2006(2):69-71.
[6] 胡冰.并网型风力发电技术的现状及发展趋势探讨[J].科技创业家,2014(3):137.
[7] 金鑫.风力发电机组系统建模与仿真研究[D].重庆:重庆大学,2007.
[8] 严干贵,王茂春,穆钢,等.双馈异步风力发电机组联网运行建模及其无功静态调节能力研究[J].电工技术学报,2008,23(7):98-99.
[9] 黄子龙.风电建模及海上风电场并网规划原则研究[D].广州:华南理工大学,2013.
[10] 吴吟萧.基于风速预估的风力发电控制系统研究[D].哈尔滨:哈尔滨工业大学,2010.
[11] 张毅,郑颖楠.基于动态功率偏差调节的双馈风力发电系统MPPT控制策略[J].电源学报,2013(2):110-114.
[12] 陈忠维.垂直轴风力机叶尖速比分析研究[J].可再生能源,2008,26(5):76-77.
[13] 汪萍萍.风力发电机组偏航控制系统的设计与研究[D].乌鲁木齐:新疆农业大学,2012.
Wind power control system based on E-Wind Turbine experiment platform
Gao Zhe, Wang Pei, Zhao Yanhua, Liu Ting
(College of Light Industry,Liaoning University,Shenyang 110036, China)
The large scale,the high cost of site training and the high danger coefficient are the characteristics of wind power generation system,hence it is necessary to investigate the wind power generation control based on the wind power simulation equipment.Taking the E-Wind Turbine experiment platform as an example,the structure and the implementation method control scheme of the experiment platform on the double-fed wind power generation system with the variable speed and pitch are addressed in detail.By the integrated development environment PORTAL STEP 7,the yaw,speed control and power control are achieved based on S7-1200 series of PLC.By the analysis of the experimental results,the designed wind power generation system can simulate effectively the various control requirements of the actual wind power motor,providing a very efficient means of control scheme on wind power generation system.
double-fed wind power generation system; E-Wind Turbine experiment platform; variable speed and pitch; S7-1200 series of PLC
2014- 12- 30 修改日期:2015- 01- 19
国家自然科学基金项目(61304094)
高哲(1983—),男,辽宁沈阳,工学博士,讲师,主要从事分数阶控制系统、智能优化方法及电力系统复杂性分析方面研究.
E-mail:gaozhe83@gmail.com
TM614
A
1002-4956(2015)7- 0091- 05
猜你喜欢
山东冶金(2022年4期)2022-09-14
小天使·五年级语数英综合(2021年9期)2021-09-18
测控技术(2018年5期)2018-12-09
军事文摘·科学少年(2017年2期)2017-04-26
家教世界·创新阅读(2017年1期)2017-02-07
文理导航·科普童话(2016年3期)2016-04-26
通信电源技术(2016年4期)2016-04-04
振动工程学报(2015年1期)2015-03-01
太阳能(2015年6期)2015-02-28
新疆钢铁(2015年3期)2015-02-20