
光镊系统的粒子自动对焦成像方法研究
2015-05-08 01:22:24赵志丹周哲海张晓林祝连庆
自动化仪表 2015年10期
赵志丹 周哲海 张晓林 祝连庆
(北京信息科技大学仪器科学与光电工程学院,北京 100192)
光镊系统的粒子自动对焦成像方法研究
赵志丹 周哲海 张晓林 祝连庆
(北京信息科技大学仪器科学与光电工程学院,北京 100192)
光镊系统是集计算机技术、物理技术、控制技术及图像处理技术等于一体的复杂操控系统,微小粒子的自动对焦成像是实现粒子捕获及操控的关键。为了优化光镊系统中自动对焦成像过程,对自动对焦成像方法进行了研究,并在研究经典搜索算法的基础上,提出了一种改进的爬山算法。将曲线拟合方法集成到爬山算法中,避免了传统的爬山算法最后在焦点附近反复搜索的缺点。最后搭建了试验系统,试验结果验证了方法的可行性和有效性。
光镊 粒子捕获 自动对焦成像 爬山算法 曲线拟合
0 引言
光镊是利用聚焦激光束产生的辐射力操控微小粒子的技术。相关研究最早可追溯至20世纪70年代,美国贝尔实验室的Ashkin发现了在激光的作用下粒子会改变运动状态[1],并在1986年成功使用单光束实现了稳定的三维粒子捕获,即单光束梯度力势阱[2]。随后,国内外众多研究机构开展了光镊的相关研究。目前,该技术已在生物学、医学、物理学、材料学等领域获得了广泛应用[3]。
在光镊技术这种集计算机技术、物理技术、控制技术及图像处理技术于一体的复杂系统技术中,每一个环节都会影响其精密度,其中微小粒子的自动对焦成像是实现粒子捕获及操控的关键。只有准确、快速地获得高清晰度的粒子成像,才能准确分析粒子的形貌及空间位置信息、光镊系统的操控性能,为操控系统提供准确的指令信息。
本文在研究光镊系统中的粒子自动对焦成像方法的经典算法的基础上,提出了一种改进的爬山算法。将曲线拟合方法集成到爬山算法中,避免了传统算法在焦点附近反复搜索的缺点。通过搭建光镊系统,进行了初步的试验验证,研究结果表明,利用该算法可有效地实现粒子的自动对焦控制,验证了方法的可行性和有效性。
1 方法的基本原理
自动对焦技术在成像领域获得了非常广泛的应用,并提出了很多的方法[4-8]。总体上讲,自动对焦方法可分为主动式和被动式两大类。主动式对焦方法根据系统成像原理,采用测距传感器主动对被测工件平面、镜头以及 CMOS 之间的相对距离进行测量,使相机刚好移动到 CMOS 与像平面重合的位置。被动式对焦方法是以近几十年来迅速发展的计算机图像处理技术为基础,通过对不同的位置获取图像清晰度的判断,从而不断调整相机或镜头的位置,并最终找到获得清晰图像的对焦位置。
本文主要研究基于机器视觉的被动式对焦方法。该方法是以图像清晰度的判据为基础的对焦过程,如图1所示。系统采集到图像数据后,计算机按照事前预置的函数对图像进行相关的评价计算,然后根据计算结果和搜索算法去控制电机运转的运行轨迹,最终实现整个系统的过程调节。

图1 自动对焦系统流程图
Fig.1 Process of auto-focusing system
与传统的自动调焦方式相比,基于数字图像处理的自动调焦方式充分利用了计算机处理数字信号的硬件高速度和软件灵活性。该类型方法主要有离焦深度法和对焦深度法:离焦深度法是从离焦图像中取得深度信息,只需获得两三幅图像便可完成对焦,速度快但对焦精度低;对焦深度法是建立在搜索算法基础上的,通过改变相对位置获得一系列模糊程度不等的图像,通过计算构建对焦区间上的图像清晰度评价曲线来确定对焦位置。根据以上分析,精确采用对焦深度法,该方法包括3个步骤:图像的采集、图像清晰度评价、对焦控制算法的选择。
自动调焦的过程就是利用调焦搜索算法求取调焦评价函数最大值的过程。调焦搜索算法可以分为判定搜索方向和搜索评价函数峰值两个步骤。一般需要至少采集两帧图像,然后根据这两帧图像的评价函数值大小来确定调焦方向。有时为了避免局部极值的干扰,可以采集3帧甚至更多帧图像来确保调焦方向的正确性。理想的搜索方法应满足如下条件:① 采集的图像尽量少;② 电机往返的次数尽量少;③ 评价函数峰值的定位准确。
典型的搜索方法主要包括黄金分割搜索算法、尺子搜索算法、爬山搜索算法、曲线拟合搜索算法等。爬山法在实际应用中有较高的可行性[9-10],但该方法容易陷入评价函数的局部极值。此外,该方法在精调焦阶段需要在焦点位置附近进行大量的搜索,降低了搜索的效率。为此,本文提出将爬山搜索算法和曲线拟合的搜索方法相结合,在焦点附近采用曲线拟合的搜索方法可以得到较高准确度的焦点位置。
1.1 焦点方向的判断
由于噪声的存在,调焦评价函数曲线可能会存在多个局部的极值点。采用传统的爬山法易陷入局部的极值,导致不能搜索到真正的焦点位置,故需要对爬山算法进行一些改进。传统的爬山算法一般通过比较两点的调焦评价函数的值来判断搜索方向,比较容易受到噪声的影响。本文改进的具体方法是:搜索开始时,在同一方向上采集3帧图像,对应的调焦评价函数值分别为K1、K2和K3。若K1≤K2≤K3,则此时在爬山阶段,应该继续往同一方向搜索;如果出现K1>K2且K2≤K3的情况,则说明遇到噪声扰动,应该继续往同一方向搜索;若K1>K2>K3,说明此时处于下坡的阶段,需要改变搜索方向。
1.2 自适应步长

1.3 曲线拟合
将上面得到的最大点及左右极值点进行曲线拟合,然后驱使电机直达焦点位置,可极大地提高搜索的效率和精度。该算法的主要流程如图2所示,分为粗搜索和精搜索两个阶段。

图2 改进的爬山搜索算法流程图
2 试验系统搭建及验证
为验证所提出的改进的爬山算法的自动对焦方法的可行性与有效性,搭建了光镊系统,并引入自动对焦技术,进行了初步的试验研究。
2.1 试验系统
光镊系统的结构示意图如图3所示,主要分为光束整形、粒子捕获、粒子成像3个部分。
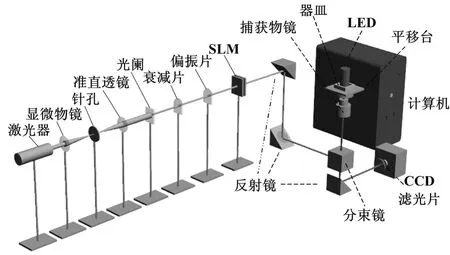
图3 光镊系统及其自动对焦系统的结构示意图
① 光束整形部分,将激光器发出的光束经过针孔滤波器后,被准直透镜准直为平行光束,然后利用光阑和衰减器控制光斑的大小和强弱,通过偏振片后控制光束的偏振态。该光束进一步被空间光调制器(spatial light modulator, SLM)调制,得到具有特定的振幅及相位分布的激光束;不同振幅及相位分布的激光束对应不同强度分布的聚焦光场分布。
② 粒子捕获部分,具有特定振幅及相位分布的激光器被捕获透镜聚焦为具有特定强度分布的聚焦光斑。当实时利用SLM调控激光束的振幅及相位分布时,可实时调控聚焦光斑的空间分布,从而实现微小粒子的捕获及灵活操控,如空间移动、旋转等。
③ 粒子成像部分,采用LED作为照明光源照明捕获的粒子,并通过捕获透镜成像到CCD相机上。在相机前加入滤光片可滤出捕获激光束,只允许照明光束通过,从而避免捕获激光束对应像的干扰。利用步进电机或压电陶瓷驱动器控制CCD在导轨上的空间位置,实现自动对焦,获得高清晰度的粒子成像。计算机接收CCD采集图像,通过本论文提出的搜索算法,计算理想焦平面的位置,经过不断的步进驱动、搜索计算,最终使CCD置于理想焦平面的位置,从而获得高清晰度成像,为进一步的粒子空间特征信息分析提供了基础。利用该自动对焦系统,还可以实时追踪粒子的空间运动过程。
本试验系统采用532 nm激光器作为捕获光源,使用100倍的放大物镜,捕获粒子直径约5m的聚苯乙烯小球,利用步进电机(最小步长为0.312 5 μm)驱动CCD在导轨上移动,并选取Brener 算子作为清晰度评价函数。
2.2 试验结果分析
图4是基于以上自动对焦光镊系统,利用改进的爬山搜索方法得到的对焦前后粒子在CCD上的成像结果。很显然,通过自动对焦处理,得到了高清晰度的粒子成像。

图4 自动调焦前后CCD采集到的粒子图像对比
系统稳定性是显微自动对焦系统一个很重要的特性。只有当系统的稳定性优良,可重复操作,在一定的范围内确保每次都能准确的对焦,该系统才有可能被实际应用。
当物镜倍率为100倍时,随机选取理想焦平面两侧20个不同的初始位置,通过搜索算法获得最终的对焦位置,均值为50.725 μm,均方差δ=0.512。各对焦结果在准焦位置附近的分布如图5所示。从图5可看出,对焦分布曲线没什么大起伏,因此说明分布比较稳定。

图5 不同位置对焦结果的分布图
另外,对焦时间也是衡量自动对焦系统性能的一个很重要指标,在保证对焦精度的情况下,对焦时间越短越好。系统的对焦时间和离焦程度大小有非常大的关系,当离焦很远时,有可能误判,甚至将出现南辕北辙的现象。当然可以通过程序设计改善此现象,如设定一个最大单向位移,超过此范围评价函数值还是没有明显变化的就立即向反向运动。调焦时间主要受路径搜索策略和步进电机运行耗时影响。
表1是基于本文提出的搜索算法的自动对焦的耗时结果。
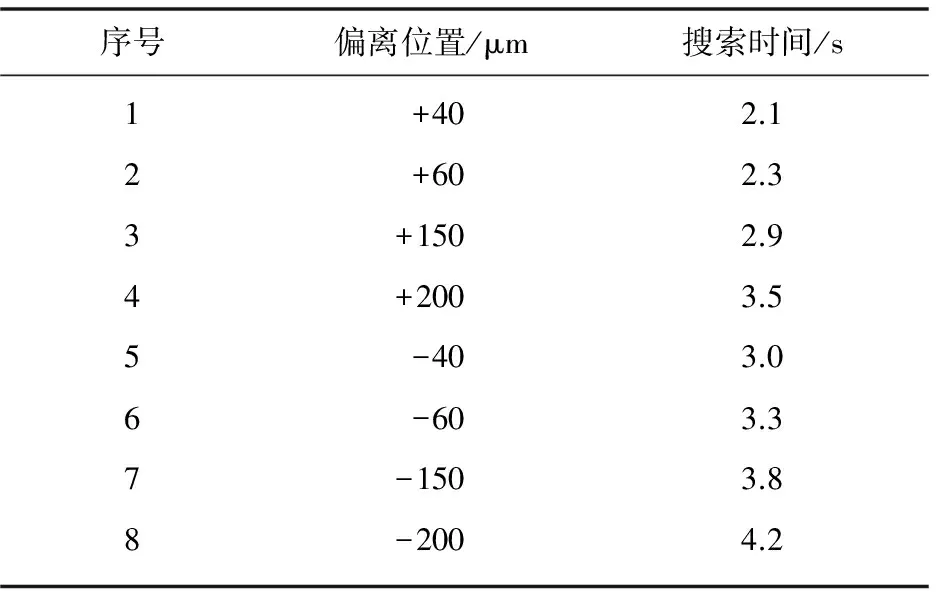
表1 偏离位置和对应的搜索时间
通过结果分析可知,系统可以在相对较短的时间内获得理想焦平面位置,但步进电机的耗时还是较大。由于该步进电机不支持运行时读出位移,因此在电机运行时间就立即给个Timer定时读出串口回传信号。这个定时器的定时时间不大好设置,这也是本系统接下来需要重点改进的地方,例如可采用压电陶瓷驱动器代替步进电机以提高系统响应时间。
3 结束语
本文研究了光镊系统中实现粒子高清晰度成像的自动对焦方法,提出了一种改进的爬山搜索算法,可准确、高效率地实现理想焦平面的定位,避免了在焦平面的反复搜索。为验证方法的可行性和有效性,搭建了光镊系统及其自动对焦成像系统,实现了粒子的快速高清晰度成像。利用该系统,当CCD处于不同的初始位置时都能在若干秒内快速对焦成像。为进一步提高系统的响应速度,可考虑采用压电陶瓷驱动器来驱动CCD的移动。
[1] Ashkin A.Acceleration and trapping of particles by radiation pressure[J]. Phys.Rev.Lett.,1970,24(4):156-159.
[2] Ashkin A,Dziedzic J M,Bjorkholm J E,et al.Observation of asingle-beam gradient force optical trap for dielectric particles[J].Opt.Lett,1986(11):288-290.
[3] Jeffrey R M,Yann R C,Steven B S,et al.Recent advances in optical tweezers[J].Annual Review of Biochemistry,2008,77(1):205-228.
[4] 陈国金.数字图像自动聚焦技术研究及系统实现[D].西安:西安电子科技大学,2007.
[5] 于秋水.基于图像处理方法的光学瞄具自动调焦技术研究[D].长春:长春理工大学,2010.
[6] 胡凤萍.视频自动聚焦方法的研究与实现[D].西安:西安电子科技大学,2008.
[7] 李奇.徐之海.冯华君,等.数字成象系统自动对焦区域设计[J].光子学报,2002,31(1):63-66.
[8] 朱孔凤.姜威.王端芳,等.用高斯非均匀采样解决自动聚焦中的误判[J].光学技术,2005,31(6):910-912.
[9] 郑玉珍.自动对焦中的优化爬山搜索算法[J].浙江科技学院学报,2005,17(3):171-174.
[10]牟宏鑫,吴庆畅,张翠,等.一种改进的自动调焦爬山搜索算法[J].昆明冶金高等专科学校学报,2010,26(3):32-35.
Research on Autofocus Imaging Method of Particles in Optical Tweezers System
Optical tweezers system is a complicated manipulation system that integrates computer technology, physics technology, control technology and image processing technology. Autofocus imaging of the micro particles is the key point to implement particle capture and manipulation. In order to optimize the autofocus imaging processing in optical tweezers system, the autofocus imaging methods are researched; and on the basis of researching the classical researching algorithm, the improved hill-climbing algorithm is proposed. The curve fitting method is integrated into hill climbing algorithm to avoid the disadvantage of traditional hill climbing algorithm, i.e., repeated researches are conducted near the focus point. Finally, the experimental system is setup; the result of experiments verifies the feasibility and effectiveness of this method.
Optical tweezers Particle capture Autofocus imaging Hill-climbing algorithm Curve fitting
国家自然科学基金资助项目(编号:61108047、61475021);
教育部新世纪优秀人才基金资助项目(编号:NCET-13-0667);
北京市青年拔尖人才基金资助项目(编号:CIT&TCD201404113)。
赵志丹(1988-),女,现为北京信息科技大学光学工程专业在读硕士研究生;主要从事光镊系统控制技术方面的研究。
TP27;TH74
A
10.16086/j.cnki.issn1000-0380.201510006
修改稿收到日期:2014-12-07。
猜你喜欢
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:42
作文成功之路·小学版(2019年12期)2020-01-19 02:08:48
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:38
小学生导刊(2018年31期)2018-12-06 08:36:46
光学精密工程(2016年4期)2016-11-07 09:05:39
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
小主人报(2016年3期)2016-02-28 20:47:13
空间控制技术与应用(2015年1期)2015-06-05 12:22:16
电测与仪表(2015年15期)2015-04-12 00:43:48
河北科技大学学报(2015年5期)2015-03-11 16:16:37
