基于电子差速的自动导引物流车的研制
2015-05-07 08:55:20
物流技术 2015年19期
(湖北工业大学 电气与电子工程学院,湖北 武汉 430068)
1 引言
自动导引物流车AGV(Automated Guided Vehicle,以下简称AGV)已广泛应用于物流仓储、生产线等。然而现有AGV大多采用转向舵机控制运动轨迹,电动机通过减速和差速后驱动,这种结构既增加了成本,又使系统控制变得复杂。为了简化AGV的系统,本文研究一种基于电子差速和外转永磁无刷直流电动机(以下简称“外转电机”)直驱的AGV。
电子差速是根据所接收的转向控制指令,通过控制内、外车轮的速度来实现车辆的转向。将电子差速应用于AGV,可以省去了现有AGV中的伺服转向舵机和机械差速器;与此同时,外转子电机既是驱动轮又是转向轮,并不需要齿轮减速装置。因此,基于电子差速的AGV简化了系统动力结构,提高了传动效率,降低了系统成本,而且维护简单。
2 硬件设计
2.1 系统组成
本文研制的基于电子差速的主要参数为:整车重(包括负载)300kg,供电电压 24V(DC),行驶车速 1.8km/h,车身长0.9m、宽0.6m,图1为基于电子差速的AGV组成框图。
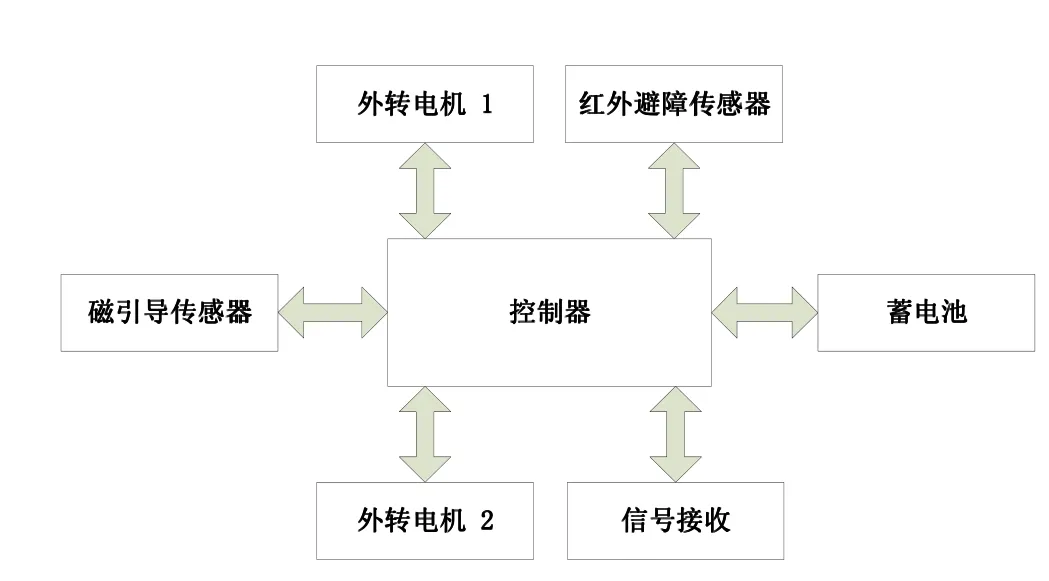
图1 基于电子差速的AGV组成框图
图1 中的蓄电池由2个12V、45Ah的串联供电。前轮是2台外转电机(既作驱动轮,也是转向轮),2个后轮为从动轮;控制器具有两方面的功能:一是实现对外转电机的驱动和控制;二是负责整车的信号采集和控制。此外,该AGV采用磁导引传感器和红外避障传感器检测外部信号。
2.2 控制器
控制器是AGV的核心,图2为其组成框图。控制器硬件电路主控芯片是TMS320F2808。电机的HALL信号为5V,在信号送入DSP之前要将其转换到3.3V且逻辑关系不变。DSP还需要对各个磁传感器以及红外避障传感器的输出信号进行采样处理,从而实现智能导航。控制器的驱动电路选择了型
号为IKCM30F60GA的智能功率模块。
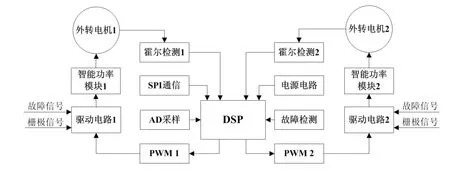
图2 基于电子差速的控制器组成框图
2.3 外转电机
根据AGV的驱动要求,所设计外转电机的主要技术参数为:额定功率250W,额定电压24V,额定转速350r/min。经过优化设计,最终选择了30/27的极槽配合,外转电机外转子外径为130mm,轴向长为35mm。图3是该外转电机的磁场仿真图,图4为外转电机电磁转矩仿真曲线,平均转矩为7Nm,可以满足驱动要求。
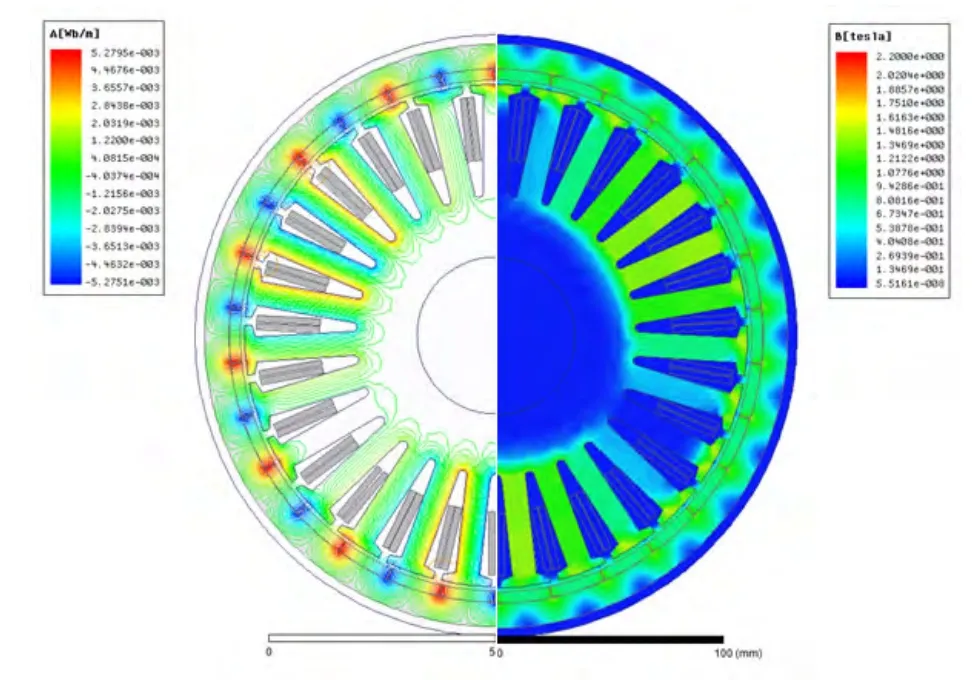
图3 外转电机磁场仿真云图

图4 外转电机电磁转矩仿真曲线
3 软件设计
3.1 整车控制
基于电子差速的AGV整车控制软件不仅包含底层外转电机的驱动,还包括电子差速转向、红外避障、人机交互、故障检测保护、电池电量监测等功能,系统软件结构框图如图5所示。
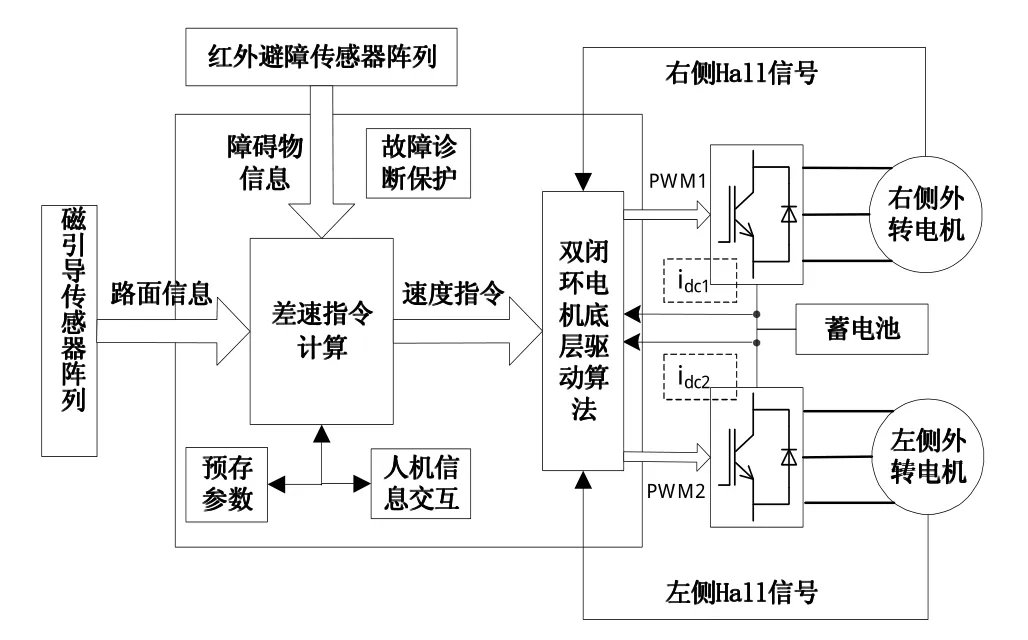
图5 基于电子差速的整车控制软件设计框图
AGV路面行驶时,外转电机反馈出Hall信号,控制器对信号进行处理,发出转速指令,同时通过磁导引传感器和红外避障传感器对路面信息进行采集,控制器进行内部运算,对外转电机发出转向指令。蓄电池提供直流侧母线电压,并且通过电平转换电路对控制器供电。
3.2 电子差速模型
根据Ackermann转向几何原理建立AGV电子差速模型如图6所示。
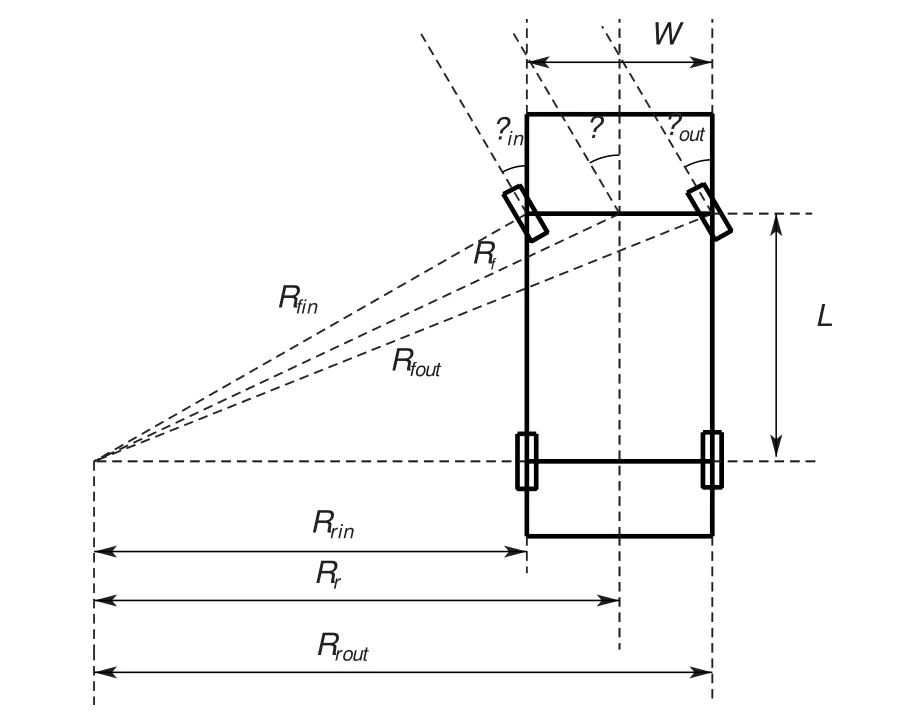
图6 AGV电子差速转向几何模型
图6 中,W为车身宽度,L为车身长度,β为车身转向角度,βin为内侧车轮转角,βout为外侧车轮转角。
由图6可得内、外侧车轮的速度分别为
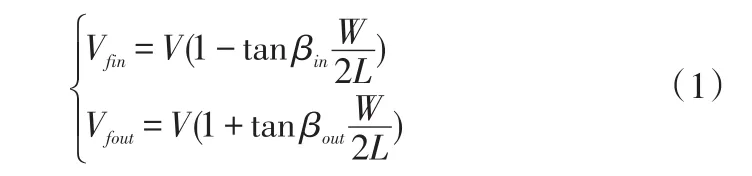
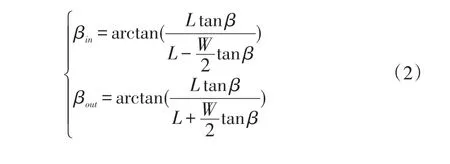
式(1)中,Vfin为内侧车轮速度,Vfout为外侧车轮速度,V为整车行驶速度,且βin、βout分别为:
差速转向作为AGV的上层控制,需根据车速V和转向角度b计算两驱动轮的速度来实现转向。
3.3 外转电机控制
外转电机会产生换相转矩脉动,为减小AGV振动、降低工作噪声,在电机速度环中引入了模糊PI调节器,图7为速度环模糊PI调节器。
选取转速偏差信号为模糊输入量E1,转速偏差信号的一阶微分为模糊输入量E2,Δkp为模糊调节器输出的转速环kp增量,Δki为模糊调节器输出的转速环ki增量。根据多次实际调试经验取E1模糊集论域为{-80,-40,-20,0,20,40,80};E2模糊集论域为{-1500,-800,-300,0,300,800,1 500};Δkp模糊集论域为{-10,-5,-2,0,2,5,10};Δki模糊集论域为{-80,-40,-20,0,20,40,80}。E1、E2、Δkp、Δki的模糊子集都为{NB,NM,NS,ZO,PS,PM,PB}。PI_Fuzzy_Set根据所制定的模糊规则输出Δkp和Δki的增量,这里kp和ki的基础值分别设置为15和100。
4 试制与试验
图8、图9分别为作者设计并制作的AGV外转电机和整车实物照片。AGV车头两侧为驱动轮,后为从动轮,蓄电池组和控制器在车的中央,车头底板下方布置有磁传感器阵列,车身两侧布置有红外避障传感。

图8 AGV外转电机
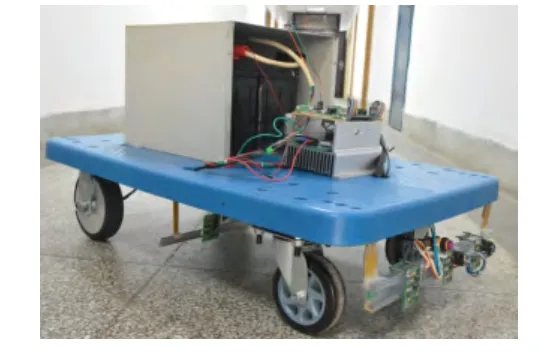
图9 AGV实物照片
4.1 负载试验
AGV满载质量为300kg,考虑车身的强度,现场实验时整车质量约为150kg,此时用示波器记录外转电机的电流波形,如图10所示。可见,外转电机三相电流对称,换相尖峰得到了较好抑制,一相电流的幅值为4.5A,约为电机额定电流的一半。
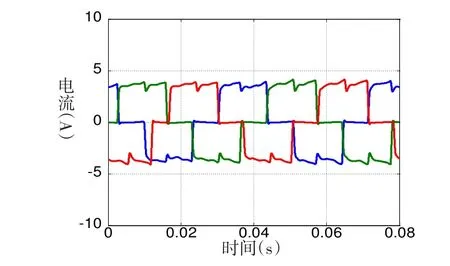
图10 外转电机实测电流波形
图11 给出了模糊PI与常规PI的转速实验波形。与常规PI相比,模糊PI的转速响应时间缩短,具有更好的动态稳定性和跟踪性能。
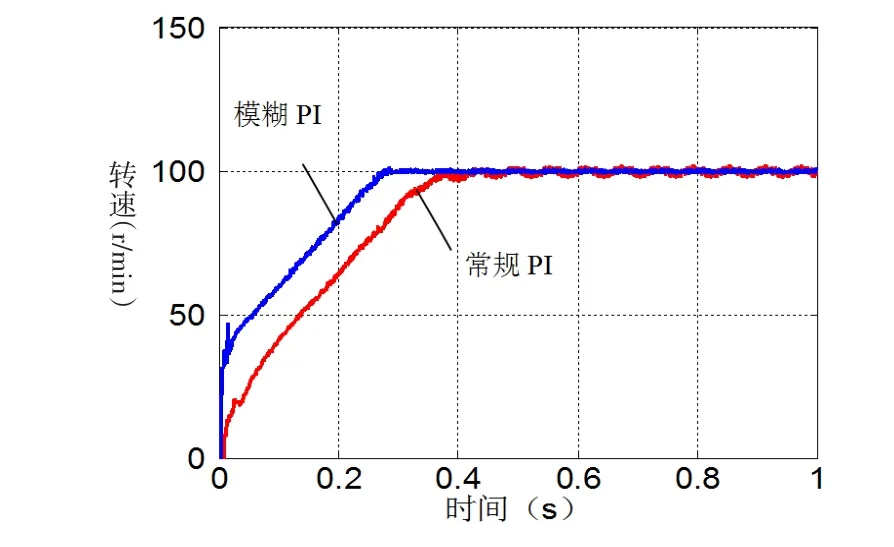
图11 模糊与常规PI的转速响应曲线
4.2 电子差速转向试验
为验证电子差速转向控制的准确性,在0-3s给定直行指令,3-5.5s给定左转30°指令,5.5-8s给定直行指令,根据实验采集到左右侧车轮行驶路程计算出二轮行驶路程差值如图12所示。可见,0-3s直行指令下二轮行驶路程差值为零,表明二轮转速响应的一致性好;3-5.5s左转30°指令下,左侧车轮速度为0.62m/s,右侧车轮速度为1m/s,实测转向角度为28°。实验与目标指令存在偏差大致有以下两方面原因:一是车轮转速并不能突变,从直行指令到转向指令有一个短暂过渡;二是路面凹凸、车轮滑移等状况也会对目标指令的跟随造成影响。
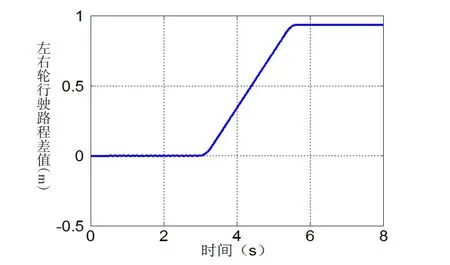
图12 左右侧车轮行驶路程的差值
4.3 导引试验
为验证AGV的自动导引能力,试验前在地面上粘贴了黑色的磁性轨道线,并将沙漏悬挂于AGV尾的中部,用来描绘AGV实际运行轨迹,实验得到沙漏轨迹如图13所示。可见,沙漏轨迹与磁带轨道线吻合良好,表明AGV具有较高的跟踪导引能力。

图13 AGV车的行驶轨迹
[1]张正义.AGV技术发展综述[J].物流技术与应用,2005,(7).
[2]储江伟,顾柏园.基于视觉导引的两轮差速转向AGV设计[J].物流技术,2002,(7):12-14.
[3]Kodagoda K R S,Wijesoma W S,Teoh E K.Fuzzy speed and steering control of an AGV[J].Control Systems Technology IEEE Transactions on,2002,10(1):112-120.
[4]Hung Y C,Lin F J,Hwang J C,et al.Wavelet Fuzzy Neural Network With Asymmetric Membership Function Controller for Electric Power Steering System via Improved Differential Evolution[J].IEEE Transactions on Power Electronics,2015,30(4):2 350-2 362.
[5]Yang Y P,Xing X Y.Design of electric differential system for an electric vehicle with dual wheel motors[A].47th Conference on Decision and Control[C].2008.
[6]Zhao Y E,Zhang J W,Guan X Q.Modeling and simulation of electronic differential system for an electric vehicle with two-motor-wheel drive[A].IEEE Intelligent Vehicles Symposium[C].2009.
[7]Lee J S,Ryoo Y J,Lim Y C,et al.A neural network model of electric differential system for electric vehicle[A].26th Annual Conference of the IEEE[C].2000.
[8]徐海贵.基于磁阻传感器阵列的车辆自主导航系统研究[D].上海:上海交通大学,2009.
[9]Zou X,Huang D,Feng D,et al.Design of a double-deck automatic guided vehicle with magnetic traction for material transporting[A].2014 IEEE International Conference on Mechatronics and Automation(ICMA)[C].2014.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:08
小读者(2019年24期)2020-01-19 01:51:36
汽车维修技师(2019年7期)2020-01-16 04:33:04
汽车观察(2019年2期)2019-03-15 06:00:34
汽车维修技师(2018年11期)2018-05-11 02:38:32
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:30
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
发明与创新·中学生(2016年7期)2016-05-14 04:08:26
噪声与振动控制(2015年4期)2015-01-01 07:08:09
新高考·高一物理(2014年4期)2014-09-17 06:52:02