
Brussel模型的混沌控制
2015-05-04 09:16马莉兰州石化职业技术学院电子电气工程系甘肃兰州730060
电气自动化 2015年5期
马莉(兰州石化职业技术学院 电子电气工程系,甘肃 兰州 730060)
Brussel模型的混沌控制
马莉
(兰州石化职业技术学院 电子电气工程系,甘肃 兰州 730060)
对化学反应中的Brussel模型的动力学行为进行了研究,针对其混沌现象,用线性反馈方法和多变量注入反馈控制法对系统进行控制,数值仿真结果显示,这两种控制方法都能将系统混沌有效地抑制到周期轨道。相图和状态历程图显示了系统随着被控参数的变化,最终被控制在周期轨道的情形。全局分岔图揭示了系统随着被控参数的变化,存在的复杂动力学现象,倍化分岔、叉式分岔、倍化分岔序列最终通向混沌的过程。
Brussel模型;化学反应;混沌;混沌控制;数值模拟;分岔;相图
0 引 言
化学Brussel模型是化学反应中出现湍流现象的典型模型之一,布鲁塞尔模型(Brusselator)是由Lefever和Prigogine于1965年提出的。研究该模型有助于更好地观察诸如酶促反应和糖、酵解循环以及包含膜结合酶的反应。反应过程中产生的中间元素起着催化作用,且两种元素呈周期性变化,其结果不同于一般的化学反应最终达到一个平稳,而是两种元素长时间停留在一个时间上振动(oscillation),空间上又有扩散的过程。
近年来对于化工领域中的动力学行为研究取得了长远的发展,许多学者在此领域做了大量的工作,用数值仿真的方法研究化学反应中的动力学行为也被许多学者采用,对于Brussel模型的动力学行为及混沌控制,有学者分析了该模型的不稳定性[1]和HOPY分支[2],有学者研究了该模型的动力学行为[3]。而对于控制理论和控制方法的研究也取得了很大成绩[4-8],本文运用线性反馈方法和多变量注入反馈控制法对Brussel模型进行控制,数值仿真结果显示,相图和全局分岔图均显示系统能被有效的抑制到周期轨道。
1 Brussel模型
在考虑定态解的时候,Brussel模型可转为众所周知的非线性方程。 Brussel模型的方程描述为:
(1)
其中A=0.4,B=1.2,a=0.12,ω=0.9时出现混沌。数值仿真中混沌态时的相图和时间历程图,分别如图1和图2所示。
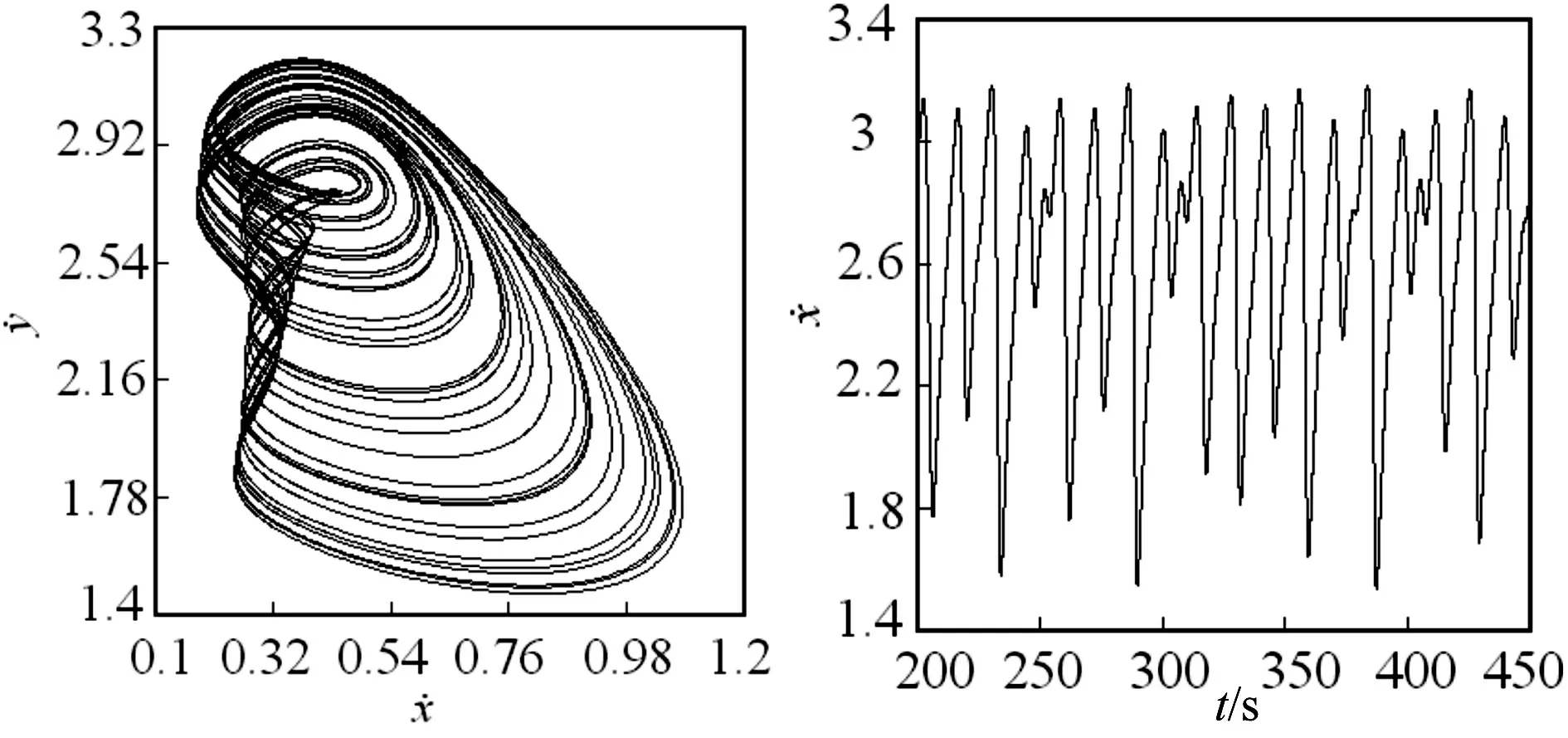
图1 系统混沌态时的相轨迹图 图2 系统混沌态时的状态历程图
2 使用线性反馈方法对系统进行控制
对于非线性化学动力学模型Brussel,当仅对一个输出变量进行线性反馈控制时,原方程变为如下形式:
(2)
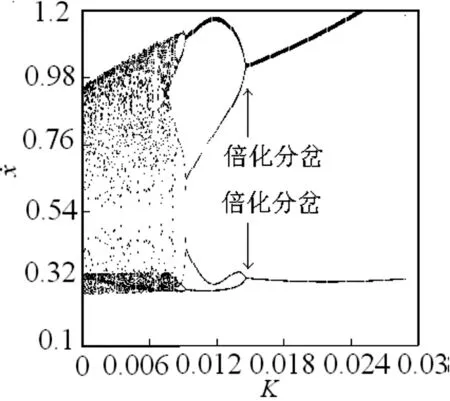
图3 线性反馈控制全局分岔图
当取给定的值A=0.4,B=1.2,a=0.12,ω=0.9时,不断调整控制参数K的值,数值仿真出全局分岔图,如图3所示,从图3中看出,系统在控制参数K∈(0.015,0.03)范围时,系统被控制到稳定的周期2状态。随着控制参数K的不断减小,系统发生倍化分岔,然后通过倍化分岔序列,最终通向混沌。
给K设定值,当连续变化K值时,这种控制能成功的将混沌系统驱动到周期轨道。图4为K=0.012时系统运动的相轨迹图。系统的混沌态虽然受到明显的控制,但系统依然重复出现在周期4轨道上。继续对K进行调整,当K=0.018时,系统的周期规律更加明显,系统被控制在稳定的周期2轨道上,如图6所示。图5,图7,分别是系统在周期4轨道和周期2轨道上的状态历程图,从这些图的变化中,可以很清楚地看到系统处在不同状态时,状态历程的变化。
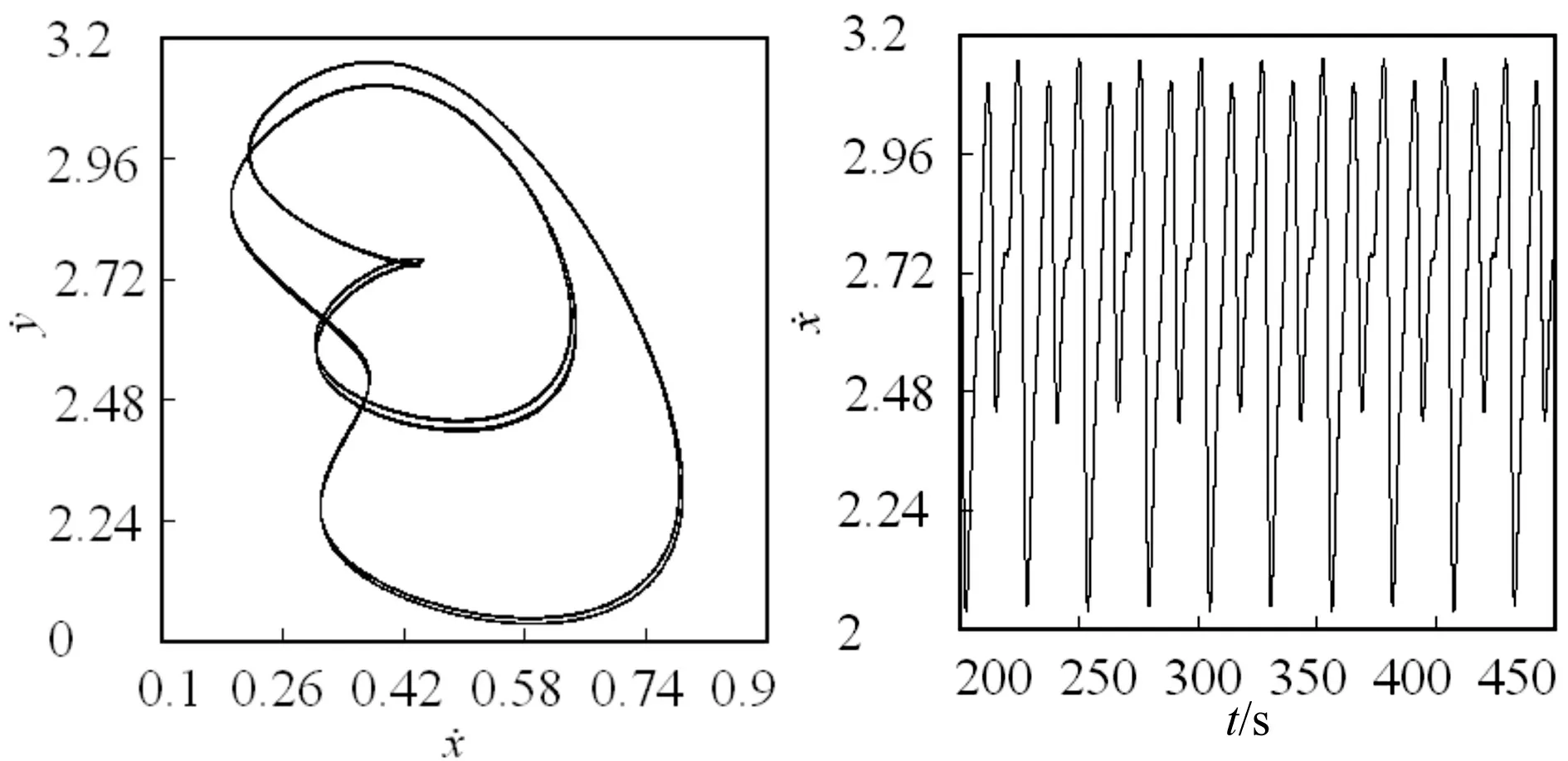
图4 K=0.012的相图 图5 K=0.012的状态历程图
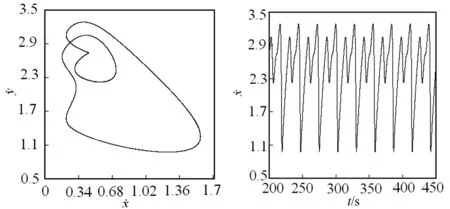
图6 K=0.018的相图 图7 K=0.018的状态历程图
3 用多变量注入反馈控制法对系统进行控制
对于非线性化学动力学Brussel模型,加入多变量注入反馈控制,原方程变为如下形式
(3)
由于多变量反馈控制法只需加入小的反馈系数,令K1=K2=0.01时,当变量进行变化到E1=E2=0.009 6时,系统被成功的控制在周期2轨道上。图8形象的描述了系统处于周期2轨道的相轨迹,图9为此种状态下的状态历程图。令K1=K2的值不变,重新对E1=E2的值进行调整,当变量变化到E1=E2=0.014 4时,系统得到了有效的控制,呈现出不同于前一次周期2轨道,如图10所示。这种情况说明多变量注入反馈控制方法取得了一定的效果,但还需要进一步调整参数,使它得到更好的控制。图11为这种情况下的状态历程图。令K1=K2的值不变,再次重新对E1=E2的值进行新的调整,当变量变化到E1=E2=0.019 2时,系统被成功的控制在单周期轨道上,图12为此种状态下的状态历程图。令E1=E2=0.1时,对K1=K2进行控制,系统单周期出现圆环形式,如图14所示,图15为在这种情况下的状态历程图。
随着控制量值的不断变化,按照预期的计划,将系统控制到了周期轨道上,这说明线性多变量注入反馈控制方法对系统能够进行有效的控制。K1=K2,E1=E2的值在不同的范围内变化,系统将会被控制在不同的周期轨道上,说明该系统的动力学行为对于参数的依赖性很强。
分别讨论不同参数对系统的影响,对有效的控制系统有很好的作用。设定E1=E2=0.1时,随K1=K2值的不断变化,系统状态呈现丰富的变化形式,变化的分岔全局图,如图16所示。当K1=K2∈[0.075,0.085]时,系统呈现单周期运行轨迹。当K1=K2=0.075时,系统发生倍化分岔,由单周期轨道演变为2周期轨道。当K1=K2∈[0,0.05]时,系统一直处于周期2的运动状态。当K1=K2=0.05时,发生叉式分岔,系统尽管依然呈现周期2运行状态,但是运行轨迹发生变化。设定K1=K2=0.001,E1=E2,随着E1值的不断变化,数值仿真系统的全局分岔图,如图17所示。当K1=K2∈[0.019 2,0.024],系统呈现周期2轨道,当K1=K2=0.019 2附近时,系统发生形式多样的分岔,主要有倍化分岔和叉式分岔。之后系统不断的经过倍化分岔的序列,最终通向混沌状态。
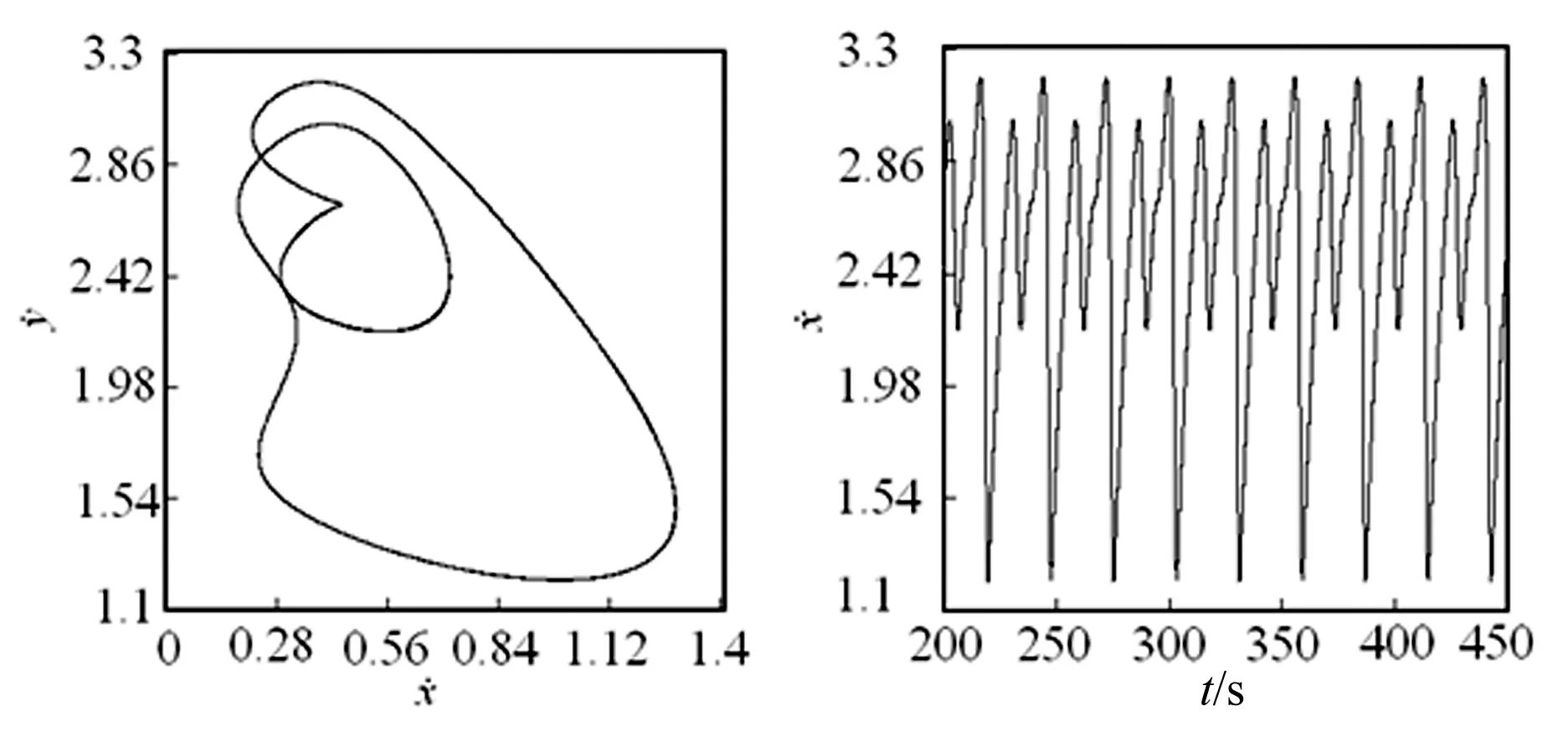
图8 周期二相图 图9 周期二状态历程图
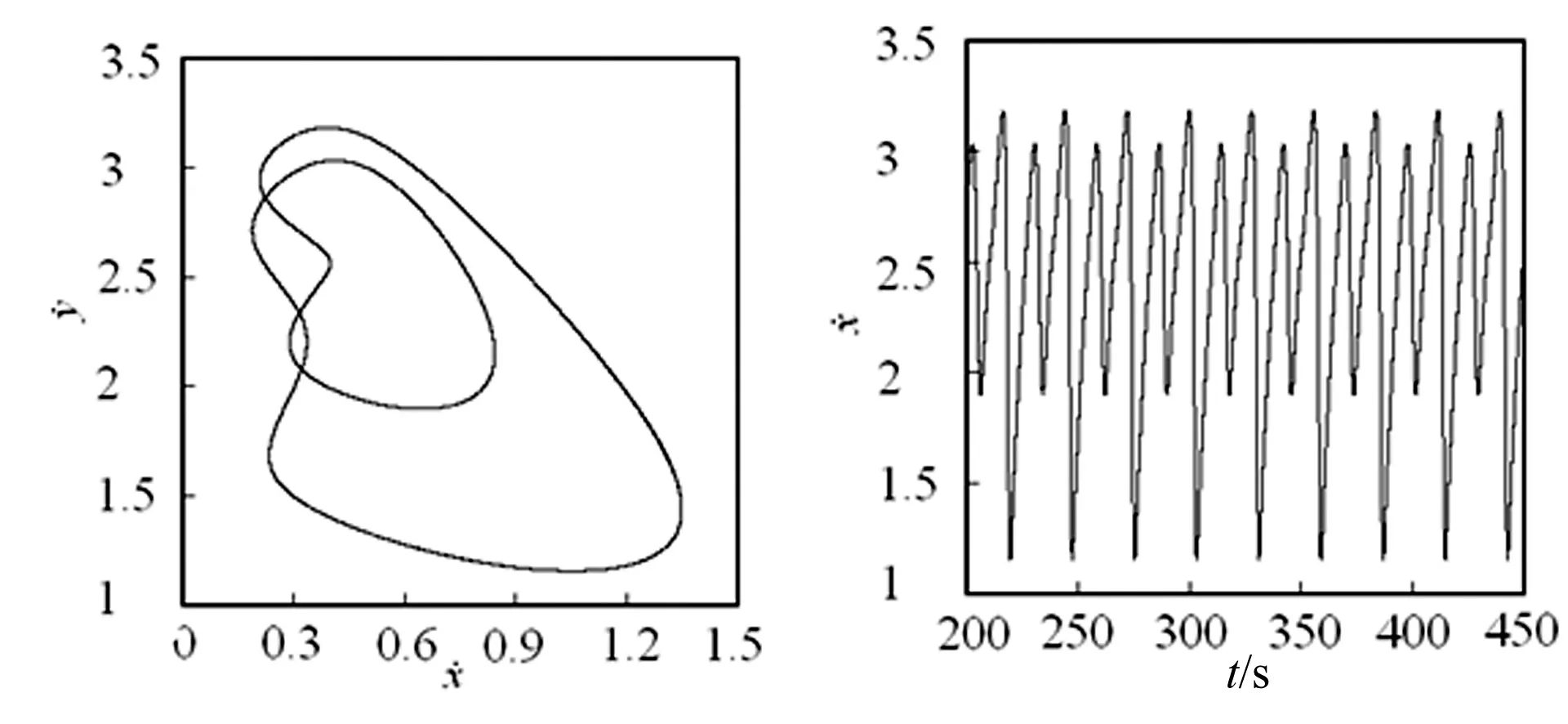
图10 周期二另一种相图 图11 周期二另一种状态历程图
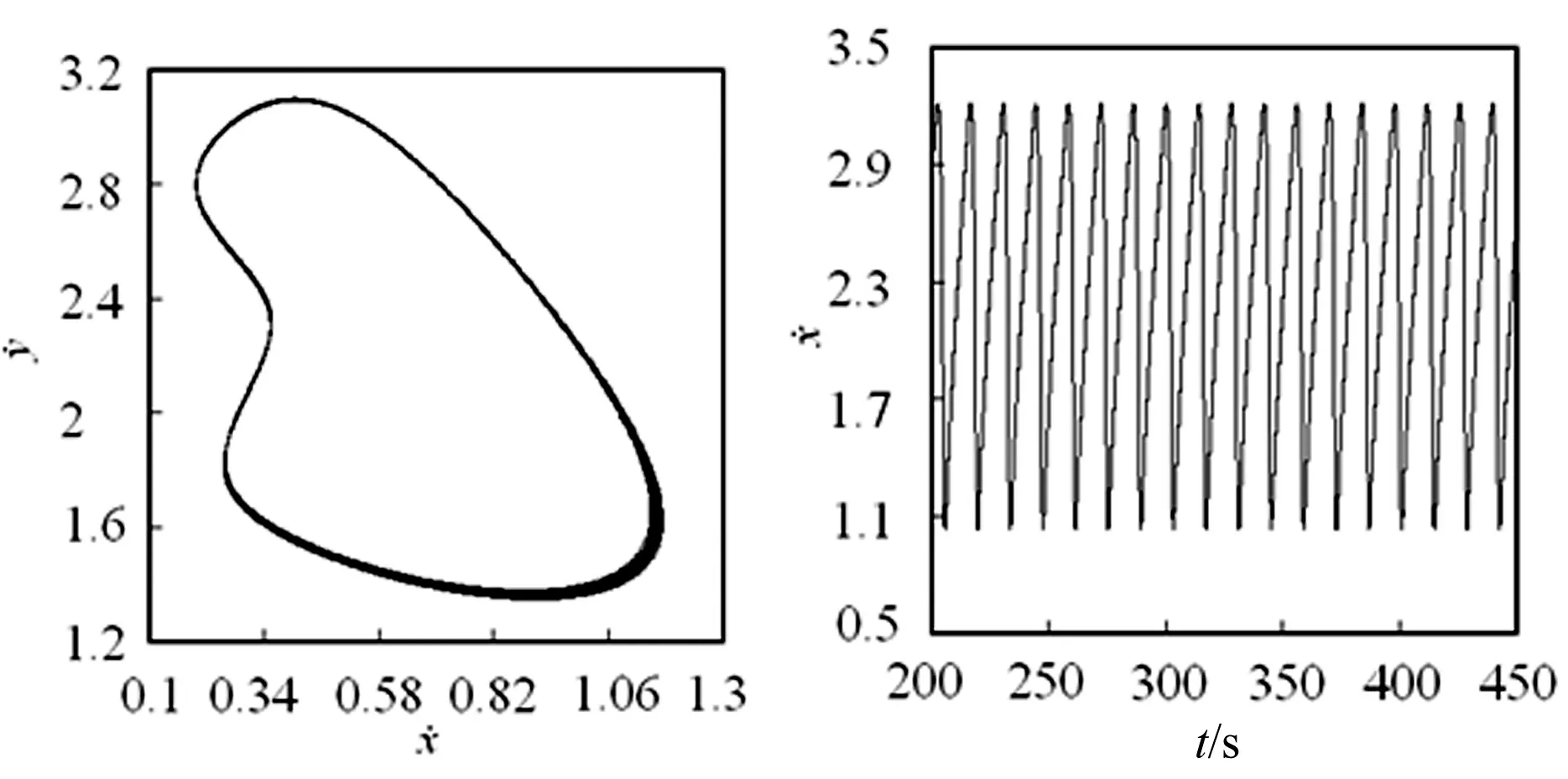
图12 单周期相图 图13 单周期状态历程图
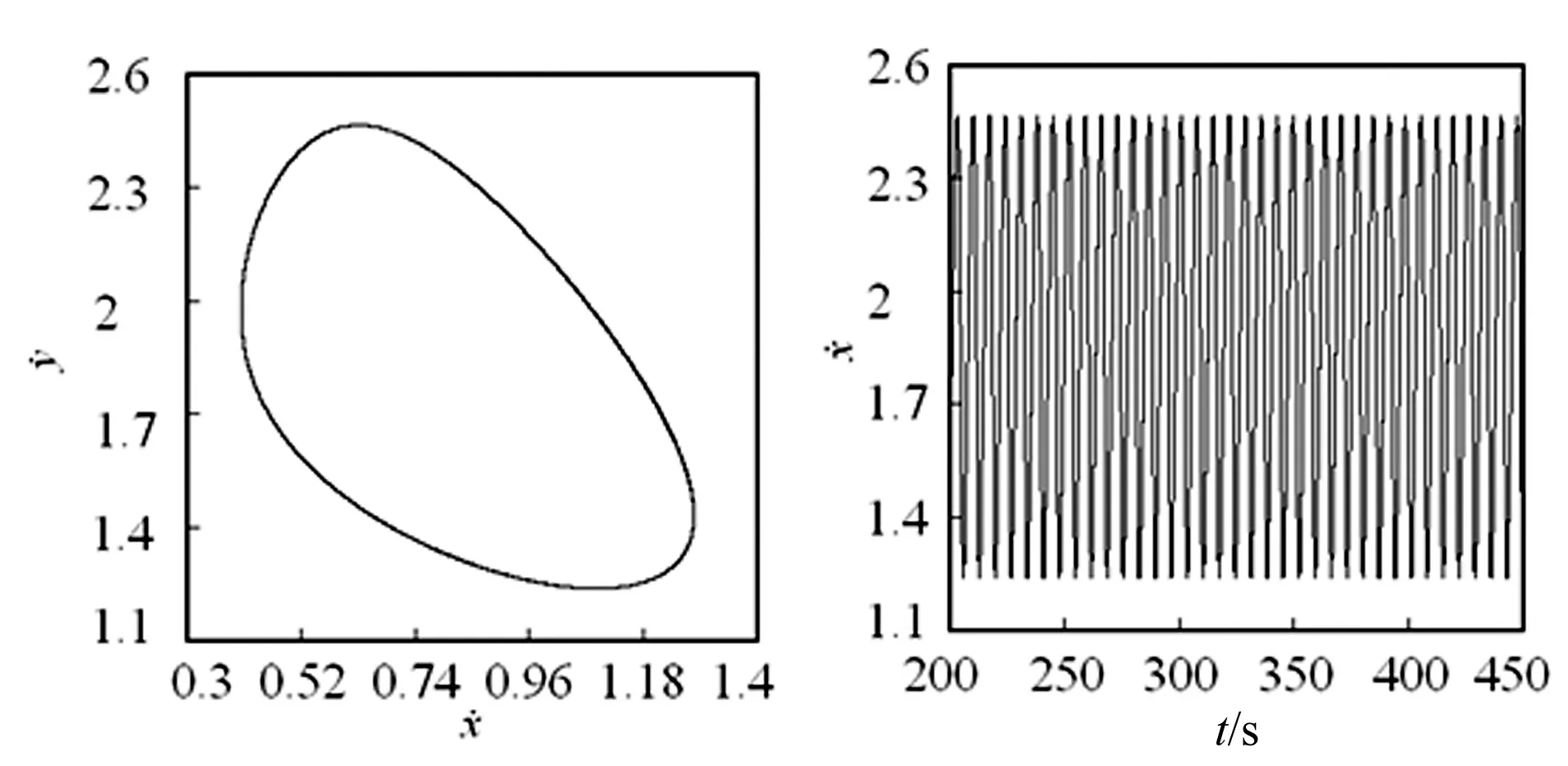
图14 单周期另一种相图 图15 单周期另一种状态历程图
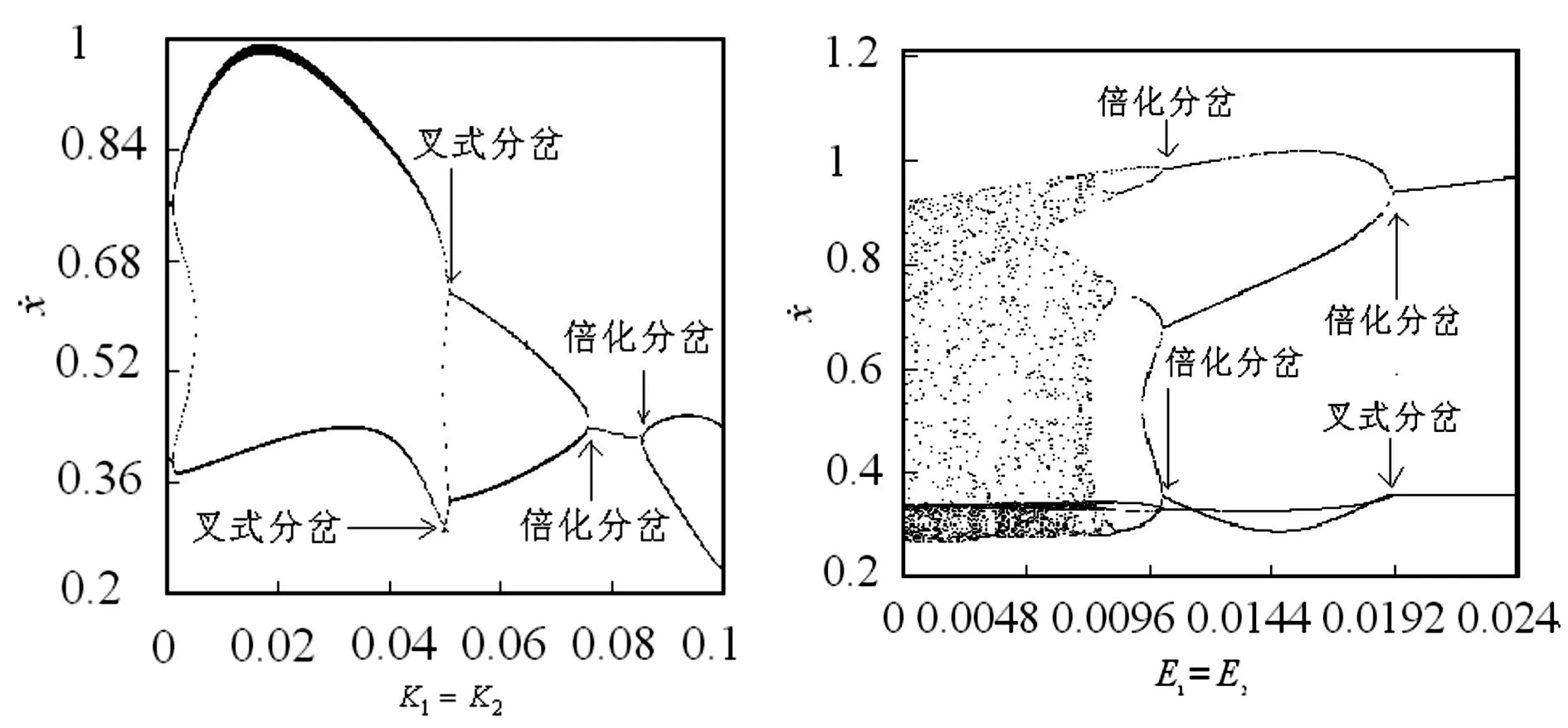
图16 E1=E2=0.1,K1=K2控制的全局分岔图 图17 K1=K2=0.001,E1=E2控制的全局分岔图
4 结束语
本文针对Brussel模型的混沌状态,分别运用线性反馈方法和多变量注入反馈控制法对系统进行控制,数值仿真结果显示,这两种控制方法都能将系统很好的控制到周期轨道。在运用线性反馈控制法时,全局分岔图显示,系统随着线性反馈控制参数K的不断减小,被控系统发生倍化分岔,经由倍化分岔序列最终通向混沌。相图和状态历程图分别显示了周期四和周期二时的情形。在采用多变量注入反馈控制法对系统进行控制时,令K1=K2的值不变,对E1=E2的值进行设置,系统被控制到周期二轨道和单周期轨道,并分别给出了周期二和单周期轨道时的相图和状态历程图。随后用全局分岔图显示了系统随参数K1=K2、E1=E2变化的情形,当E1=E2恒定,随着K1=K2的不断减小,系统发生了倍化分岔,叉式分岔等分岔现象;当K1=K2恒定,随着E1=E2的不断减小,系统存在倍化分岔、叉式分岔现象,但系统最终通过倍化分岔序列通向混沌。本文工作揭示了线性反馈控制法和多变量注入反馈控制法对Brussel模型有效的控制,为Brussel模型在实际工程应用中的混沌控制提供了理论依据,为探索Brussel模型混沌抑制的其它方法奠定了理论基础。
[1] PENG RU, WANG MING XIN. On steady-state solutions of the brusselator-type system[J]. Nonlinear Analysis , 2009 , 71 : 1389-1394 .
[2] LI BO, WANG MINGXIN.Diffusion-driven instability and hopf bifurcation in the brusselator system[J].Applied Mathematics and Mechanics,2008,29(6):749-756.
[3] PENG R, WANG M X. Pattern formation in the brusselator system[ J] . Journal of Mathem Atical Analysis and Applications , 2005, 309(1) : 151-166.
[4] 谢军,黄禹,龚时华,等.带阶跃扰动的无静差控制系统设计[J]. 电气自动化,2013,35(2):1-3.
[5] 贾美美,张国山,牛弘.基于改善关联性Buck变换器的混沌控制[J]. 物理学报,2013,71(13):116-123.
[6] YI F Q,WEI J J,SHI J P. Diffusion-driven instability and bifurcation in the lengyel-epstein system[J]. Nonlinear Analysis: RWA,2008,9( 3): 1038-1051.
[7] 祁汭晗.现代控制理论的MATLAB实现[J]. 电气自动化,2012,34(4):5-7.
[8] 王跃钢,文超斌,杨家胜,等.基于无模型方法的混沌系统自适应控制[J]. 物理学报,2013,71(10):73-79.
Chaos Control of Brussel Model
MA Li
(Department of Electronic and Electrical Engineering, Lanzhou Petrochemical College of Vocational Technology, Lanzhou Gansu 730060, China)
Dynamic behaviors of the Brussel model in chemical reaction are studied in this paper. Linear feedback and multi-variable injection feedback are used to control the chaos of the system. Numerical simulation results show that, both of the two control methods can effectively suppress system chaos onto the periodic orbit. The phase diagram and state historic plot show how the system is finally controlled to the periodic orbit while the controlled parameters change. The global bifurcation diagram reveals how these complex dynamic phenomena of the system occur when the controlled parameters change, and how the sequence of doubling bifurcation-forked bifurcation-doubling bifurcation is finally passed to chaos.
Brussel model; chemical reaction; chaos; chaos control; numerical simulation; bifurcation; phase diagram
兰州石化职业技术学院教育教学研究课题项目(JY2014-26)
10.3969/j.issn.1000-3886.2015.05.006
O322
A
1000-3886(2015)05-0017-02
马莉(1982-),女,甘肃永昌人,讲师,硕士,2008年毕业于兰州交通大学,主要从事非线性系统动力学行为分析与控制及过程自动化相关领域的研究教学工作。
定稿日期: 2014-10-12
猜你喜欢
基层中医药(2022年5期)2022-10-24
数学物理学报(2022年4期)2022-08-22
党员文摘(2022年14期)2022-08-06
党员文摘(2022年7期)2022-04-28
数学物理学报(2022年2期)2022-04-26
党员文摘(2022年1期)2022-02-14
党员文摘(2022年3期)2022-02-12
金桥(2018年4期)2018-09-26
电子制作(2018年2期)2018-04-18
会计之友(2018年4期)2018-02-02
