牵引系统外围环境模拟装置的设计与实现
2015-05-04 11:11高吉磊谢冰若
铁道机车车辆 2015年6期
马 驰, 高吉磊, 赵 震, 谢冰若
(中国铁道科学研究院 机车车辆研究所, 北京 100081)
牵引系统外围环境模拟装置的设计与实现
马驰, 高吉磊, 赵震, 谢冰若
(中国铁道科学研究院机车车辆研究所, 北京 100081)
牵引系统是铁道机车车辆的核心组成部分,需要进行单独的地面调试及试验,外围环境模拟装置可为牵引系统地面调试及试验提供模拟实车的外围环境。外围环境包括网络环境和电信号环境两部分,其中网络环境基于MVB网络,采用LabVIEW编写控制程序,可模拟下达司机指令等;电信号环境基于PLC进行实现,可模拟提供牵引系统所需电压电流等信号。
牵引系统; MVB ; 外围模拟
随着牵引交流传动技术的发展,目前高速动车组的最高运营速度已达350 km/h,大功率货运机车轮周功率已达到9 600 kW。牵引系统的主要部件包括牵引变压器、牵引变流器、牵引电机。具有大功率、小体积、低损耗特性的牵引系统是未来的主要发展方向。然而面对新研发的牵引系统,在研发调试阶段直接在整车上进行试验是不现实的,因此往往需要一种仿真试验平台来作为辅助,这种平台常见的方式有地面联调试验台及半实物仿真试验台等[1]。
在国外,庞巴迪、阿尔斯通、西门子、日立、三菱等公司均建有自己的交流传动地面联调试验台或半实物仿真试验台。在国内,南车株洲电力机车研究所、北京交通大学、西南交通大学等单位也有供研发牵引系统使用的试验平台。
目前,列车网络控制系统已在动车组及机车上得到普遍应用,负责对机车车辆牵引、制动、辅助供电、车门、空调等进行控制、监视和故障诊断。常用的网络控制技术有TCN、World FIP、CAN等。同时,考虑到目前动车组及机车的研发均采用模块化设计思想,有些牵引系统所需的电压电流、冷却液温度等信号不由牵引系统直接采集而是来自车辆的其他子系统的共享信息。因此,试验平台必须为牵引系统提供包括网络信号及电信号的外围环境,针对这种情况,本文选取了使用较为普遍的TCN/MVB网络技术,设计并实现了一种牵引系统外围环境模拟装置。该外围环境模拟装置既可实现联调试验阶段时为牵引系统提供控制指令并反馈状态,也可以实现在半实物仿真试验台工作时,为牵引控制装置或控制系统原型提供控制指令并反馈状态。
1 外围环境模拟装置结构设计
考虑到外围环境包含网络环境及电信号环境两部分,两部分分别与牵引系统的网络接口和电气接口相连接,设计外围环境模拟装置与牵引系统的组成结构如图1所示。
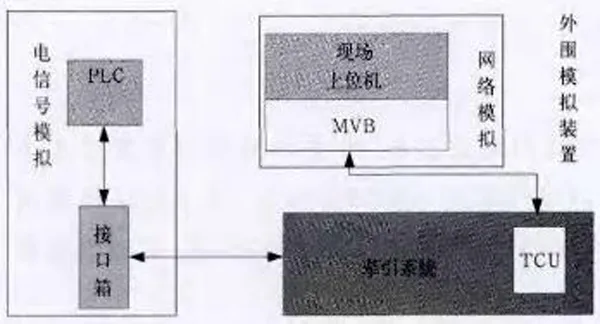
图1 外围环境模拟装置结构
2 模拟装置硬件设计
外围环境模拟装置所需硬件如图1所示,网络模拟部分采用一台配有MVB网卡的工控机,而电信号模拟部分采用PLC及接口箱。
通过分析常规牵引系统所需的外部信号,设计信号转换及控制箱的接口电路结构框图如图2所示。其中,模拟量部分实时性要求比较高、涉及牵引控制的信号直接将传感器的信号进行调理后输入牵引系统,如网压、网流等信号;而部分对实时性要求不敏感、且不参与动态连续控制的外部电信号则通过电位器进行模拟,如冷却液压力、温度等信号。需要根据具体运行工况进行转换的数字量由PLC输出,通过信号转换及控制箱进行电平变换,而对工况变换不敏感但又需要变换的量则可通过手动开关面板进行给定,信号由PLC采集经调理后最终输出到牵引系统。

图2 电信号接口硬件结构设计
3 模拟装置软件设计
模拟装置仿真软件需要兼顾网络模拟与电信号模拟两部分的工作。软件可按功能分为MVB通讯模块、PLC监控模块、可视化界面模块及主逻辑控制模块。为实现人机交互采用NI公司的LabVIEW开发主界面,采用微软公司的Visual C++开发MVB底层驱动。设计模拟装置软件结构如图3所示。

图3 模拟装置软件设计
各部分模块分别完成以下工作:
(1)MVB通讯模块
MVB通讯模块通过调用MVB网卡的驱动程序,进行MVB网络配置及网络数据收发,从而实现对牵引系统的控制。根据IEC 61375-1协议规定,MVB遵循OSI中的层划分,其通信往往可通过数据链路层或应用层来进行,考虑到牵引系统的网络通信中存在大量的短长度数据,因此选择在应用层上进行数据通信编程。其模块连线示意如图4。
(2)PLC监控模块
该模块可通过OPC(OLE for Process Control)技术,只需通过以太网将PLC与现场工控机进行连接,即可在工控机上即时监控PLC中的所有变量。

图4 MVB通信模块示意
(3)可视化界面模块
该模块为人机交互接口,通过调用MVB通信模块、PLC监控模块、主逻辑控制模块,可在界面上为牵引系统设定控制参数及其运行所需的外部参数等,同时显示牵引系统返回的运行状态参数等。
(4)主逻辑控制模块
该模块为软件的核心处理模块,用于调度网络、人机界面等模块的数据交互。依照程序执行顺序,主要完成以下工作:
①初始化MVB网络数据结构,将常量定义为预置参数,并将数据结构中的部分变量依通信协议与屏幕输入参数绑定。
②校正屏幕输入参数的正确性,如保证输入的数值在实际允许范围等。
③定时请求外部参数及司控器设定,将取得的数据赋值给MVB通信协议中的相应变量。
④定时将MVB网络数据结构打包成簇,发送给MVB模块。
⑤定时通过调用MVB模块来接收牵引系统返回的状态数据。
⑥在屏幕设定好牵引系统所需部分外围信号后,通过PLC监控模块来实现给定;并通过IO模块读取牵引系统输出信号,将牵引系统输出信号通过可视化界面模块显示在屏幕上。
3.1MVB通讯模块设计
该模块中由MVB网卡底层接口、主控逻辑和MVB通信监控界面3部分组成。其中MVB网卡底层接口将对网卡映射内存地址的复杂操作封装成为若干个接口,程序运行时,在主控软件中只需简单地调用这些接口函数即可实现对MVB网卡的访问(如初始化连接,发送、接收数据等)。而主控逻辑则依据通信协议建立起对MVB通信数据流的控制,规定好所有数据的接收发送时机。
3.2MVB底层驱动设计
由于底层访问需要对内存进行操作,而C++语言具有可直接进行内存操作且高效便捷的特点,因此选取Visual C++为底层接口开发工具。另考虑被试系统上位机采用LabVIEW开发,调用C++代码极为不便,但可以很好地支持对动态链接库DLL文件,故选择将底层访问接口封装为DLL文件。
MVB底层驱动程序可提供如表1所示函数以实现网卡底层操作,需要将这些函数声明为API,封装为DLL文件,即可在LabVIEW中调用。
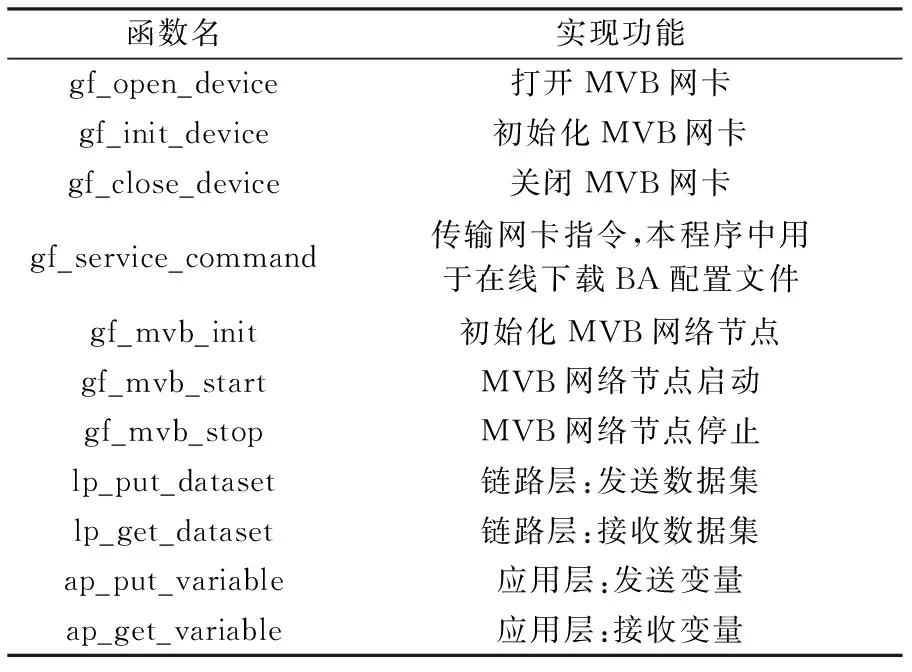
表1 函数功能表
3.3MVB总线配置设计
MVB协议中规定MVB网络调度工作由总线管理器(Bus Administrator,以下简称BA)来完成,本模拟装置所选MVB网卡本身具备BA功能,该网卡提供了专业的BA配置工具MVB Configuration Tool(如图所示,以下简称MCT)。
利用该工具可以完成以下工作:
(1)配置MVB网络组态。为每台网络设备分配MVB地址,并配置每台网络设备的类型,指定带BA功能的设备。
(2)配置MVB网络端口。依据IEC 61375-1[2],“端口是一种共享的内存结构,能够同时被应用层和网络层访问”、“一个通信存储器中的端口由端口地址来标识”,可知MVB协议中的数据传输属性均通过端口来定义,端口与具体设备无关。一个通信存储器中最多支持4 096个端口,每个端口最大为256位。在过程数据通信中,依据端口是发送还是接受数据,分别定义了源端口和宿端口,同时亦需定义该过程数据通信的通信周期、数据尺寸(即端口大小,本项目中用到的有64位、128位、256位)等属性。
配置完毕后利用MCT对配置工程进行编译,生成二进制bin文件,用以下载到MVB网卡的BA模块芯片中。
3.4MVB主控逻辑实现
通过分析MVB底层访问接口的功能,并结合应用中的需求,可以列出主逻辑流程图如图5所示。
在确定了主控逻辑流程之后,为了实现每一步骤的功能,需要对DLL函数进行访问,LabVIEW提供了“调用库函数节点”控件。通过在控件属性栏中依次输入DLL文件地址、函数名和函数参数列表,即可利用该控件调用对应的DLL文件中的底层访问函数。在此程序中,由于DLL中的函数都被定义为API类型,因此调用规范选择“stdcall(WINAPI)”。
在“参数”选项卡中,链路层和应用层进行收发的数据类型必须定义为数组数据指针形式才能被dll中的函数正确识别,因此必须将这些数据打包成数组形式。
根据牵引系统在MVB网络中所需传输的重要数据,归纳发送或接收的重要数据大致如表2所示。
考虑到本模块和整个被试系统控制软件中主控模块的接口,将数据结构中的各数据依据其物理意义和逻辑时序整合出若干重要变量,并将这些变量定义为全局变量以供调用。这些全局变量包括牵引手柄级位、主断路器开关状态、升降弓开关状态、司机钥匙开关状态。在MVB模块中实时读取这些变量的数值,并依据其实际意义去依次改变其对应在MVB通信数据结构中的具体位置。

图5 MVB主控逻辑流程图

传输状态TCU接收列车级速度及方向状态、过分相状态、列车安全环状态、列车高压系统状态、制动系统状态、防滑状态、牵引控制、电制动控制、负载接通控制、冷却风扇控制等。TCU发送TCU状态、车厢级速度及方向状态、变流器内各设备状态、电制动状态、直流辅助供电支路状态、冷却风扇状态、牵引功率、牵引力、轴速、网压、网流、中间电压等
4 装置运行测试
将本装置用于地面联调试验台及半实物仿真试验台中进行测试,截取试验过程中软件界面图示如图6。
测试结果表明,牵引系统外围环境模拟装置人机界面友好,系统软、硬件功能完整,该装置可以很好地为牵引系统提供牵引系统所需的列车运行的外围环境模拟,包括司机钥匙、升降受电弓、主断路器分合、牵引手柄操作等输入指令,也可以为牵引系统提供所所需的网侧电压、冷却系统反馈信号等,可以配合牵引系统共同完成地面联调试验的各项任务。

图6 软件运行界面截图
[1]孙彰. 轨道交通驾驶仿真器的关键技术[J]. 城市轨道交通研究, 2005,8(3):71-74.
[2]IEC 61375-1-2007 电气铁路设备.列车总线.第1部分:列车通信网络[S].
Design and Realization of Peripheral Simulator for Traction System
MAChi,GAOJilei,ZHAOZhen,XIEBingruo
(Locomotive & Car Research Institute, China Academy of Railway Sciences, Beijing 100081, China)
Traction system is the core part of the rolling stock, of which the separate test on ground is necessary, and the peripheral simulator could provide necessary peripheral environment for such test of rolling stock. The peripheral environment includes two parts, one is network environment, and another is electrical environment. The network environment simulation is based on MVB network technology, and it is programmed with LabVIEW to simulate the instructions which are triggered by driver. As well, the electrical environment is based on PLC, and could provide signals as currents and voltage for traction system.
traction system; MVB; peripheral simulator
1008-7842 (2015) 06-0007-04
男,助理研究员(
2015-06-15)
TP391.9U264.91+1
A
10.3969/j.issn.1008-7842.2015.06.02
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
军民两用技术与产品(2022年2期)2022-06-01
装备制造技术(2020年11期)2021-01-26
网络安全和信息化(2020年3期)2020-04-20
制造技术与机床(2019年6期)2019-06-25
网络安全和信息化(2019年1期)2019-02-15
制造技术与机床(2018年12期)2018-12-23
电脑爱好者(2015年15期)2015-09-10
小说林(2014年5期)2014-02-28
电影新作(2014年5期)2014-02-27