具有随机通讯时延的远程网络控制系统基于观测器的H∞控制
2015-04-27 00:12:28朱胜兰马守志
新型工业化 2015年4期
朱胜兰,马守志
(无锡环境科学与工程研究中心,无锡城市职业技术学院,江苏 无锡 214153)
具有随机通讯时延的远程网络控制系统基于观测器的H∞控制
朱胜兰,马守志
(无锡环境科学与工程研究中心,无锡城市职业技术学院,江苏 无锡 214153)
摘 要:本文主要针对一类具有随机通讯时延的由N个线性离散子系统构成的远程网络控制系统,设计基于观测器的鲁棒H∞控制器。假设状态变量不可测量且系统中数据通讯时延服从Bernoulli概率分布,通过利用Lyapounv稳定性理论和线性矩阵不等式技巧,得到使闭环系统均方指数稳定且满足指定H∞性能指标的充分条件,进而可以通过求解线性矩阵不等式得到基于观测器的控制器的相关增益矩阵。最后,通过MATLAB仿真结果验证该控制算法的有效性。
关键词:随机通讯时延;网络远程控制;观测器;H∞控制器;线性矩阵不等式
本文引用格式:朱胜兰,马守志.具有随机通讯时延的远程网络控制系统基于观测器的H∞控制[J].新型工业化,2015,5(4):24-33
0 引言
近年来由于网络技术的崛起,现实中大量控制系统都采用计算机通信网络,受到网络本身的限制,由网络通讯时延的随机性和网络拥塞导致的缓存数据溢出以及传感器暂时失效等原因都有可能造成数据的通讯时延,从而使得控制性能下降或控制系统的稳定性遭到破坏。文献[1-3]针对系统状态可测量的情况,研究具有随机通讯时延的网络控制系统反馈控制器的设计问题,而在实际工程应用中,通常只有系统的输入量和输出量能够测量,大多数系统的状态变量不易测量,因此研究具有随机通讯时延的大系统基于观测器的控制具有重要意义。
对此类网络远程控制系统的研究受到学者们越来越广泛的重视见文献[4-6]。文献[7-8]中采用满足已知概率的Bernoulli分布的序列来描述测量数据的通讯时延,基于Lyapounv稳定性理论进行控制器的设计,但其研究模型没有涉及到大系统。文献[9]针对一类网络化系统中含有信号量化和数据包丢失的问题,为了研究量化器误差对系统的影响,引入上行界的方法,对数据包丢失满足Bernoulli概率分布的系统,研究了具有测量数据丢包的基于观测器的反馈控制问题。文献[10]研究一类存在通讯时延的单一网络系统的控制器设计问题,假设通讯时延满足Bernoulli分布,利用Lyapounv稳定性理论,设计基于观测器的控制器,使得整个闭环系统是均方指数稳定的和满足指定的H∞性能指标。
本文针对一类网络中随机通讯时延满足Bernoulli概率分布的线性关联大系统,利用Lyapounv稳定性理论、线性矩阵不等式以及Schur补引理,给出了基于观测器的控制器设计方法,所设计的控制器能够使得整个闭环系统均方指数稳定并且满足指定的H∞性能指标,最后利用Matlab的LMI工具箱证明了该算法的有效性。
1 问题描述
考虑一类由n个子系统构成的离散大系统

假设存在一步通讯时延情况下系统输出端实际测量到的数据


设计基于状态观测器的动态输出反馈控制器


本文的控制目标是对系统(1)设计基于状态观测器的动态输出反馈控制器(4)-(5),使得
1)在外部扰动w(k)=0时,闭环系统(1)-(5)是均方意义下指数稳定;
2)在零初始条件下,闭环系统(1)-(5)的被控输出z(k)满足如下H∞性能指标:

本文后续证明过程中用到的相关定理、引理和定义如下:
定义1[11]: 如果w(k)=0,存在使得

其中为原系统状态和估计状态之间的误差,则闭环系统或估计误差为均方意义下指数稳定的。
引理1[11]:V(x(k))为Lyapunov函数,若存在常数λ≥0,μ>0,ν>0,0<Ψ<1使得

那么有

以下三个条件是等价的:



2 主要结果
当外部干扰w(k)=0时,下面定理1给出闭环系统满足均方意义下指数稳定的充分条件,论证过程如下。

其中
那么闭环系统(1)-(5)是均方意义下指数稳定的。
证明:选取Lyapounov函数

则
其中

由Schur补引理2知,公式(12)成立等价于θ<0,此时有


由定义1及引理1可得:闭环系统(1)-(5)是均方意义下指数稳定的。证毕。

不失一般性,我们做如下假设,矩阵Bi是一个列满秩矩阵,即rank(Bi)=mi。
系统(1)-(5)是均方意义下指数稳定的。
证明:由公式(12)得

另一方面,因为Bi是列满秩矩阵,Bi和S1iBi都线性独立于S1i>0,因此,如果式(19)成立,则有

式(21)说明了矩阵Hi必须是非奇异的。
现在研究一下怎么求解方程BiHi=S1iBi,因为Bi是列满秩矩阵,因此通常存在两个正交矩阵如下:

矩阵Bi的正奇异值。
下面考虑当外部干扰时,给出闭环系统均方意义下指数稳定且满足指定的H∞性能指标的充分条件。主要结果归结为如下定理。

则闭环系统(1)-(5)是均方意义下指数稳定的且满足指定的H∞性能指标。其中


可得
其中
由Schur补引理2,U2<0等价于公式(23)成立,此时


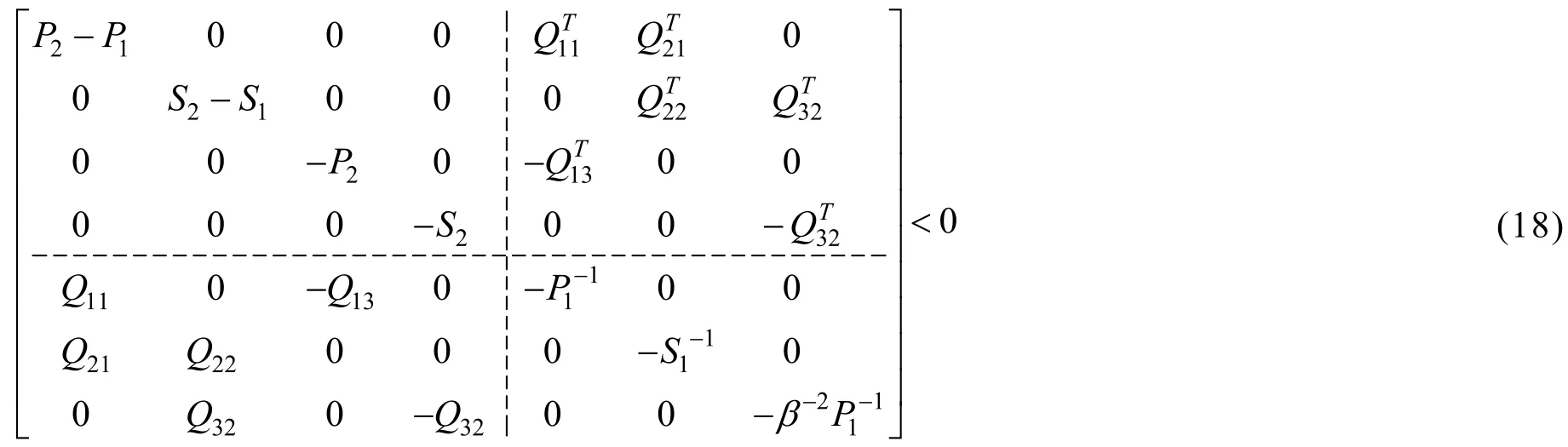
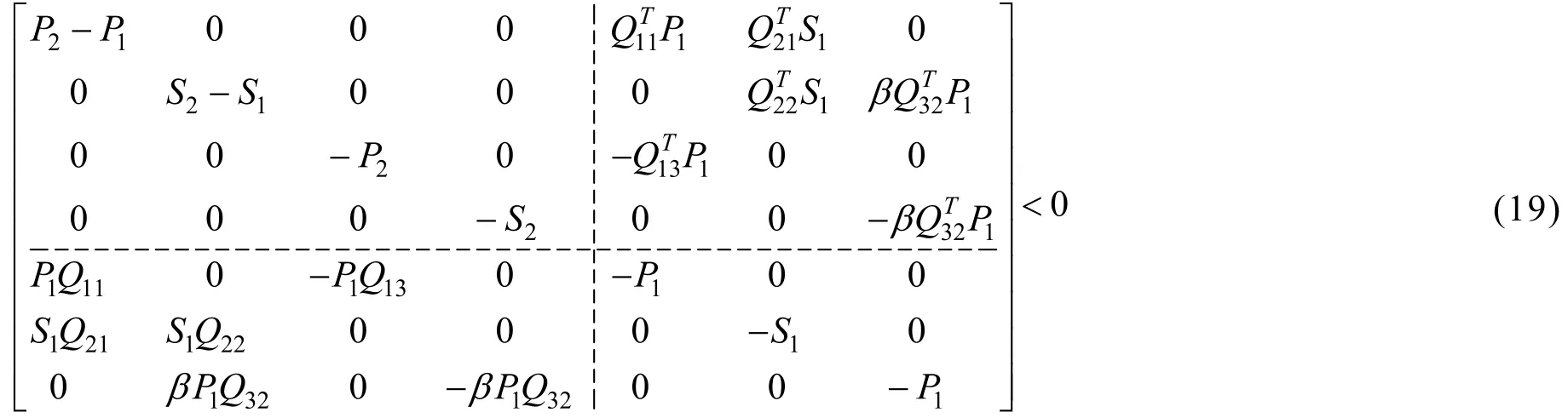
为了求解方便,将不等式(23)转化为线性矩阵不等式,给出如下定理。
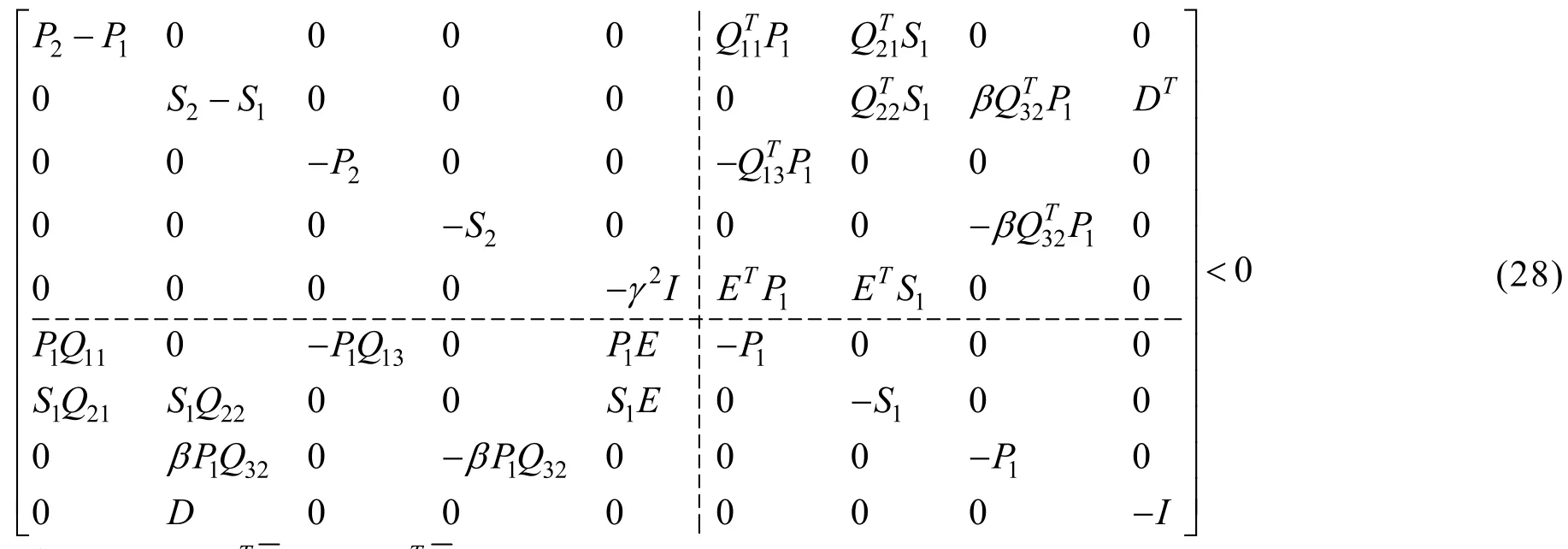
证明:不等式(23)成立等价于
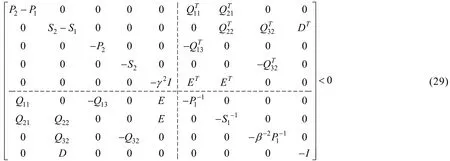

则不等式(23)与不等式(28)等价。由定理3知闭环系统(1)-(5)是均方意义下指数稳定的且满足指定的H∞性能指标。证毕。
3 仿真例子
考虑如下包含两个子系统的线性离散大系统
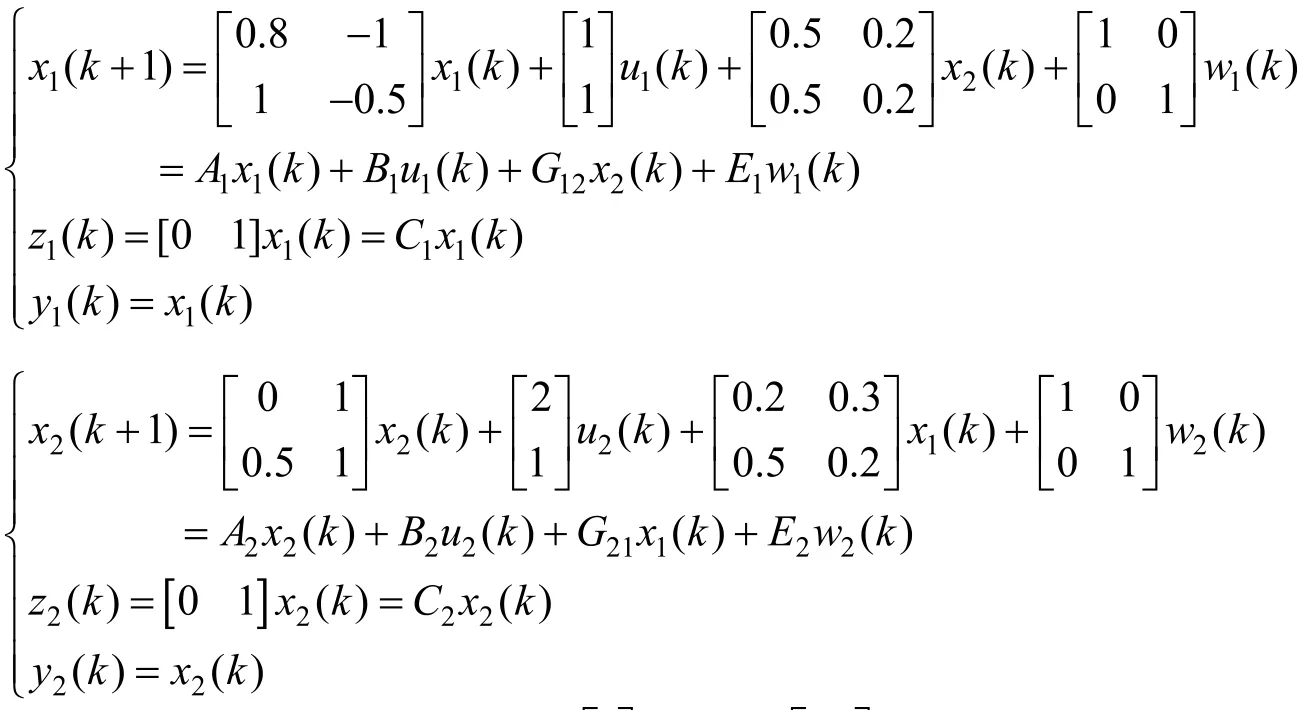
通过求解定理4中的线性矩阵不等式(28)可得


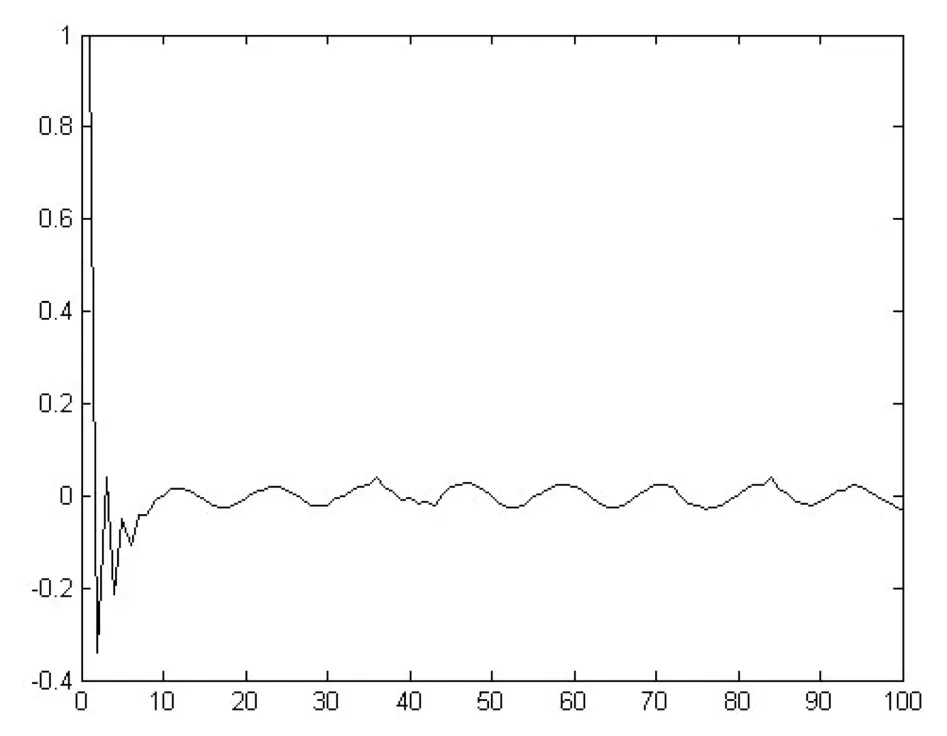
图1 控制输出z1(k)的动态响应Figure.1 The dynamic response of the control output z1(k)
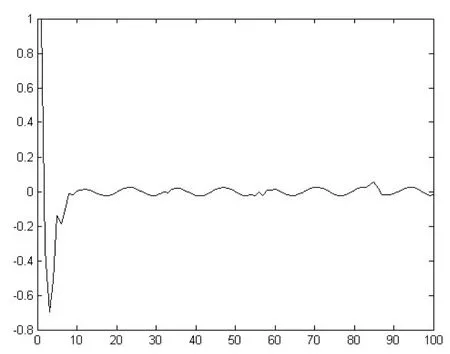
图2 控制输出z2(k)的动态响应Figure.2 The dynamic response of the control output z2(k)
4 结论
本文针对一类网络具有随机通讯时延的线性离散关联大系统,设计基于全维状态观测器的H∞鲁棒控制器。该设计方法首先给出了关联大系统具有测量数据随机通讯时延的数学模型,然后应用Lyapunov稳定性理论,推导并证明了问题可解的充分条件,通过矩阵的等效变换将问题转换成求解线性矩阵不等式问题。最后通过Matlab 工具箱中的LMI 工具软件对算例进行求解并画出仿真图,仿真结果验证了该算法的有效性。
参考文献:
[1]王武, 林琼斌, 蔡逢煌, 等.随机时延网络控制系统的H∞输出反馈控制器设计[J].控制理论与应用, 2008, 25(5): 920-924.W Wang, Q B Lin, F H Cai.Design of H∞output feedback controller for networked control system with random delays[J].Control Theory & Applications, 2008, 25(5): 920-924.
[2]周颖, 马守志, 臧强, 等.具有随机通讯时延的大系统H∞控制器设计[A].第三十一届中国控制会议论文集(D卷)[C].2012, 07.Y Zhou, S Z Ma, Q Zang, et al.H∞controller design for large-scale systems with random communication delays[A].Proceedings of the 31st Chinese Control Conference[C].2012, 07.
[3]周颖, 杨富文, 樊春霞.具有测量数据丢失的大系统鲁棒H∞控制[J].控制与决策, 2012, 27(7): 1109-1112.Y Zhou.F W Yang.C X Fan.Robust H∞control for large-scale systems with missing measurements[J].Control and Decision, 2012, 27(7): 1109-1112.
[4]Y Bao, Q Dai.Y Cui, et al.Fault detection based on robust H∞states observer on networked control systems[C].2005 International Conference on Control and Automation NewYork: IEEE Press.2005, 1237-1241.
[5]王宝凤, 郭戈.具有Markovian时延与丢包的离散系统的状态估计[J].控制理论与应用, 2009, 26(12): 1331-1336.B F Wang, G.Guo.State estimation for discrete-time systems with Markovian time-delay and packet loss[J].Control Theory & Applications, 2009, 26(12): 1331-1336.
[6]G.Guo.Linear systems with medium access constraint andMarkov actuator assignment[A].IEEE Transactions on Circuits and Systems-I: Regular Papers[C].2010, 57(11): 2999-3010.
[7]王武, 林琼斌, 杨富文.具有随机通讯时延的离散网络化系统的H∞滤波器设计[J].控制理论与应用, 2007, 24(3): 366-370.W Wang, Q B Lin, F W Yang.H∞filter design for discrete-time networked systems with random communication delays[J].Control Theory & Applications, 2007, 24(3): 366-370.
[8]Ruan Yubin, Yang Fuwen, Wang Wu.Robust fault detection for a class of networked systems with stochastic ccommunication delays[C].Proceedings of the World Congress on Intelligent Control and Automation.Piscataway, NJ, USA: IEEE.2007, 8557-8562.
[9]Niu Yugang, Jia Tinggang.Wang Xingyu.Yang Fuwen.Out put-feedback control design for NCSs subject to quantization and dropout[J].Information Sciences, 2009, 21(139): 3804-3813.
[10]Yang Fuwen, Wang Zidong, Hung Y S, et al.H∞control for networked systems with random communication delays[J].IEEE Transactions on Automatic Control, 2006, 51(3): 511.
[11]王武, 杨富文, 詹耀清.测量数据丢失的随机不确定离散系统的鲁棒H2状态估计[J].控制理论与应用, 2008, 25(3): 439-445.W Wang, F W Yang, Y Q Zhan.Robust H2state estimation for stochastic uncertain discrete-time system with missing measurements[J].Control Theory&Applications, 2008, 25(3):439-445.
[12]Ho D W C.Lu G.Robust stabilization for a class of discrete-time nonlinear systems via output feedback: The unified LMI approach[J].International Journal of Control, 2003, 76(2): 105-115.
H∞ Controller Design Based on Observer for Remote NCS with Random Communication Delay
ZHU Shenglan, MA Shouzhi
(Wuxi Environmental Science and Engineering Research Center, Wuxi City College of Vocational Technology, Wuxi 214153, China)
Abstract:This paper is concerned with a class of linear discrete-time large-scale systems which are modeled as interconnection of N subsystems.The design of observer-based controller is studied.Assuming the state of close-loop system cannot be measured and the occurrence of measurement data delays is a Bernoulli distributed sequence with known probability.Sufficient conditions are derived in terms of LMI for the existence of the observer-based controller, which can make closed-loop system exponentially stable in the sense of mean square and achieve the prescribed H∞performance.The parameters of observers and controllers are obtained by solving the LMI.The simulation results show the effectiveness of the controllers algorithm.
Keywords:random communication delays; remote ncs; observers; H∞ controllers; linear matrix inequality
DOI:10.3969/j.issn.2095-6649.2015.04.04
作者简介:朱胜兰(1984—),女,安徽人,博士研究生,主要研究方向:偏微分方程研究;马守志,男,硕士研究生,主要研究方向:偏微分方程研究
*基金项目:国家自然科学基金青年基金项目(11201115),江苏省科技厅基础研究计划(自然科学基金)(BK20140126), 无锡市教育科学“十二五”规划课题(J/D/2014/016)。
Citation: ZHU Shenglan, MA Shouzhi.H∞ Controller Design Based on Observer for Remote NCS with Random Communication Delay [J].The Journal of New Industrialization, 2015, 5(4): 24‒33.
猜你喜欢
煤气与热力(2021年12期)2022-01-19 05:19:42
自动化学报(2019年6期)2019-07-23 01:18:26
北京航空航天大学学报(2017年6期)2017-11-23 05:57:20
通信电源技术(2016年4期)2016-04-04 02:57:34
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年11期)2014-04-04 09:21:36
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17