
有色噪声条件下的子空间辨识改进方法及应用
2015-04-14 12:28:06罗小锁陈学昌曹保山
计算机工程与应用 2015年1期
罗小锁 ,陈学昌 ,曹保山
1.重庆电子工程职业学院,重庆 401331
2.重庆大学 自动化学院,重庆 400044
1 引言
传统的工业控制模型都是采用输入输出模型,包括参数模型和非参数模型。但是为了进一步提高控制性能和控制精度,学术界和工业界普遍认为应该采用状态空间模型,这样近些年所发展起来的现代滤波理论和控制器设计方法就可以发挥作用[1]。子空间辨识方法是一类状态空间模型的系统辨识方法,该方法彻底将控制工作者从繁琐的机理建模中解脱出来,只要具有足够多的过程输入输出数据就可以通过辨识方法得到过程的状态空间模型[2-3]。子空间辨识方法综合了系统理论、线性代数和统计学三方面的思想,相比于传统的辨识方法,诸如预报误差法和辅助变量法,它有如下优点:(1)不需要参数化;(2)不需要迭代优化;(3)算法实现仅依赖于一些简单可靠的线性代数工具,如QR分解、SVD分解等;(4)直接估计状态空间模型,适用于多变量系统辨识[4]。
工业生产过程中普遍存在着噪声情况,且基本上都是有色噪声[5]。传统的子空间辨识方法解决的是白噪声问题,导致辨识模型误差较大,控制效果不佳[6]。文献[7]提出一种利用加权频域子空间辨识方法来解决噪声问题,但仅考虑了白噪声问题。文献[8]提出一种闭环有色噪声系统的子空间辨识方法,但有色噪声仅局限于零均值、稳态、高斯有色噪声,本文所选有色噪声更为广义。文献[9]提出一种基于辅助变量的子空间辨识方法来处理有色噪声,将系统分解为确定性部分和随机性部分,推导过程比较复杂,而且由于众多参数的影响会导致辨识精度下降。
基于此,本文在文献[10]基础上提出一种有色噪声条件下的子空间辨识改进方法,通过变换系统模型形式将有色噪声转变成白噪声,克服了有色噪声对系统的影响。将此方法应用于CSTR的过程辨识,获得了良好的辨识效果。
2 状态空间模型描述
系统的状态空间模型方程有多种形式,其中在工业过程中最常用的为随机性形式:

其中u(k)∈m为系统的输入测量值,y(k)∈l为系统的输出测量值,x(k)∈n为系统的过程状态。w(k)∈n为系统的过程噪声,v(k)∈l为输出的测量噪声,两者均为零均值白噪声;(A,B,C,D)为相对应维数的系统矩阵。
3 改进前的子空间辨识方法
假设k为当前时刻,f为未来时刻长度,对(1)通过适当变换可得:

其中栈向量 yf、uf、wf、vf,广义可观测矩阵 Γf和Toeplitz矩阵 Hf、Gf为:
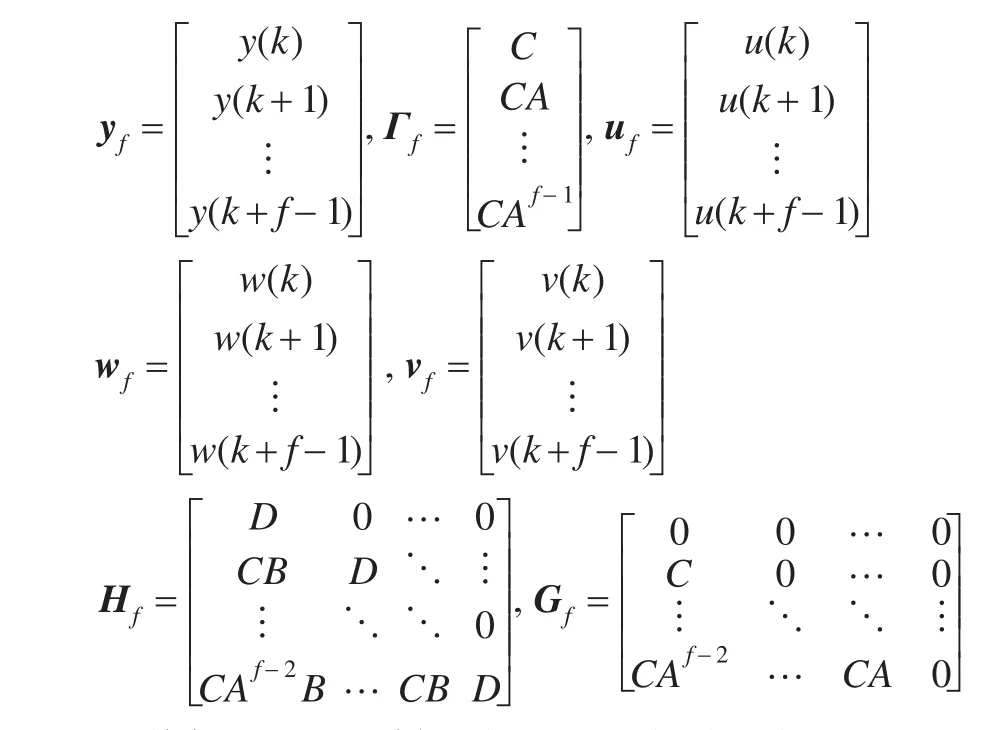
同样定义过去时刻长度p的栈向量状态空间方程:

其中栈向量 yp、up、wp、vp,广义可观测矩阵 Γp和Toeplitz矩阵Hp、Gp定义与前面相似。
将式(2)和(3)写成Hankel矩阵形式:

为了能够得到系统矩阵,子空间辨识方法一般由两步组成:(1)确定广义可观测矩阵Γf或者估计出系统的状态序列;(2)计算系统矩阵。
需要注意的是,从式(2)可知系统模型阶次将和f成正比,f选择过大,会导致高阶系统,而高阶系统会导致计算的复杂度增加,为此采用奇异值分解法来求解系统的最优模型阶次,根据系统奇异值信息的范围来确定模型阶次,具体方法可参考文献[11-12]。
3.1 确定 Γf或者
考虑矩阵等式(4),采用正交投影方法,利用线性代数工具QR分解、SVD分解等,获取等式的ΓfXf部分。
将Yf行子空间投影到Uf行子空间的正交补子空间:

根据噪声与输入不相关且由投影定理可得到:

在投影左右两边分别加入加权矩阵W1和W2并引入中间矩阵οf,通过合适变换可得:

对上式进行SVD分解得:

对于合适的加权矩阵W1,广义可观测矩阵满足:

对于合适的加权矩阵W2,矩阵满足:

可以作为状态序列Xf的估计值,而且对于特定的加权矩阵W2,矩阵为 Xf的Kalman估计。
3.2 计算系统矩阵

根据式(1),可得到如下关系式:

其中 ρw和 ρv为残差矩阵,使用最小二乘法,得到:

其中‖‖·F指矩阵的Frobenius范数。这样系统的状态空间矩阵(A,B,C,D)就被估计出来。
4 有色噪声的处理方法
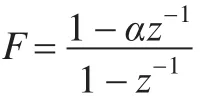
在实际的工业过程中,噪声往往是有色噪声,所谓有色噪声是指噪声序列中每一时刻的噪声和另一时刻的噪声相关。给定一个高斯白噪声信号e(k),则有色噪声ξ(k)可表示为:

给定如下的带有色噪声系统状态空间方程:

其中wns(k)和vns(k)为有色噪声序列。
将式(15)中状态空间模型变换得到:

由式(14)可知:

所以可将式(16)写成:

其中w(k)和v(k)均为零均值白噪声序列。定义新的状态空间方程状态变量xˉ、输入变量uˉ、输出变量yˉ:

变换后的系统状态空间方程为:

这样就达到了通过变换系统模型形式来处理有色噪声的目的,主要是让系统噪声变为一个零均值白噪声,虽然不能彻底消除噪声,却大大降低了噪声对系统的影响。然后,在辨识时直接利用变换系统模型后的数据得到系统的状态空间模型。
5 系统仿真
CSTR即连续搅拌反应釜,是过程控制中经常用到的系统模型,其原理为:两种不同的化学物质在反应釜中搅拌形成一种浓度为Ca的化合物A,其反应釜温度为T[13-14]。因为釜内是放热反应,反应速度会受到影响,因此必须通过引入流量为Qc的冷却剂,用来冷却釜内温度,保证产品的浓度得以控制。CSTR系统如图1所示。
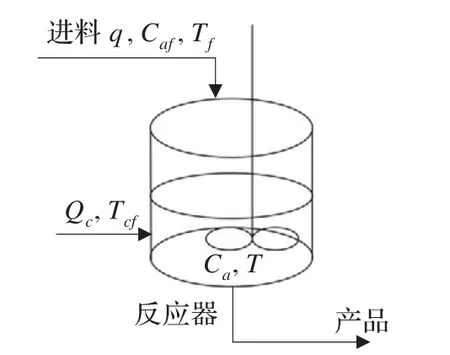
图1 CSTR系统图
CSTR为一个单输入两输出系统,输入为冷却剂流量Qc,输出为产品的浓度Ca和混合温度T。系统用非线性微分方程组可表示为:
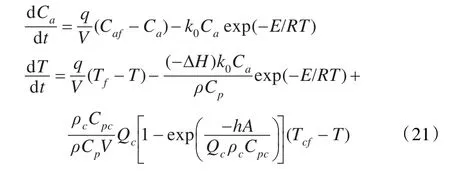
其中q为进料流量,Caf为进料浓度,Tf和Tcf分别为进料温度和冷却剂温度,k0、E R、V、k0、ρ、ρc、Cp、Cpc和hA为化学反应系数,具体参数见表1。

表1 CSTR参数表
为了验证算法,直接采用CSTR工业对象辨识得到的数据[15],取前1 000个数据用于模型辨识及验证。其中输入Qc的数据如图2所示。
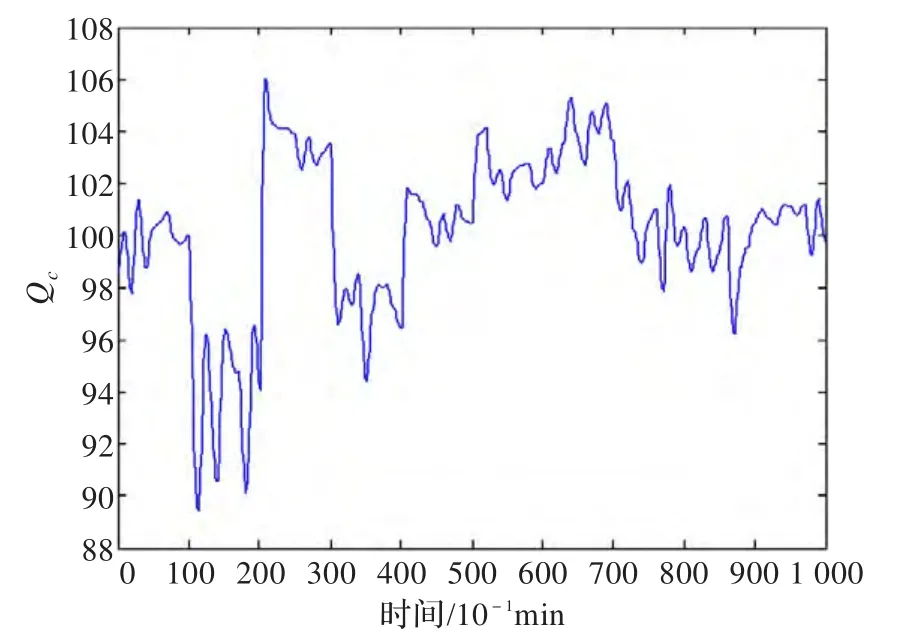
图2 辨识数据图
通过子空间辨识获得系统模型,改进前的系统与模型输出如图3所示,其中p和f均为10,采样时间为10-1min,采样数N为1 000。从图2和图3可以看出,CSTR辨识数据中包含着较强的有色噪声序列。

图3 改进前CSTR系统数据(实)和预测输出(虚)匹配验证
为了克服有色噪声数据对系统辨识的影响,引入第4章节中处理有色噪声的方法,通过变换系统模型形式将有色噪声转变为白噪声,α=0.2,使用 和 的数据进行辨识,改进后的系统与模型输出如图4所示。

图4 改进后CSTR系统数据(实)和预测输出(虚)匹配验证
为了进一步验证改进前和改进后子空间辨识方法的辨识精度,引入预测误差ε:

其中N为采样数,j代表第j个系统输出,yij和分别表示系统和模型的第j个系统输出在第i时刻的值。改进前、改进后及利用文献[9]方法得到的预测误差见表2。

表2 改进前、改进后及文献[9]方法的预测误差比较
从表2中可以看出,相比改进前和文[9]方法得到的预测误差,改进后的模型匹配误差较小,辨识模型对系统输出有着良好的预测能力。
6 结论
以CSTR系统为研究对象,以变换系统模型形式为基础,提出了一种有色噪声条件下的子空间辨识改进方法。该方法有效地克服了有色噪声对系统的影响,减小了预测误差。仿真结果表明,本文方法显著提高了CSTR的辨识精度。
[1]罗小锁,周国清,邹涛.基于子空间辨识的状态空间模型预测控制[J].计算机工程与应用,2012,48(19):234-237.
[2]Qin S J.An overview of subspace identification[J].Computers and Chemical Engineering,2006,30(10/12):1502-1513.
[3]Kameyama K,Ohsumi A.Subspace-basedpredictionof linear time-varying stochastic systems[J].Automatica,2007,43(12):2009-2021.
[4]李幼凤,苏宏业,褚健.子空间模型辨识方法综述[J].化工学报,2006,57(3):473-479.
[5]邹涛,丁宝苍,张端.模型预测控制工程应用导论[M].北京:化学工业出版社,2010.
[6]Huang B,Kadali R.Dynamic modeling,predictive control and performance monitoring:a data-driven subspace approach[M].[S.l.]:Springer,2008.
[7]李永军,马立元,王天辉,等.一种加权频域子空间模态参数辨识方法的改进[J].中国机械工程,2013,24(6):89-93.
[8]黎康,张洪华.基于高阶累积量的闭环子空间辨识算法研究[J].宇航学报,2005,26[4]:415-419.
[9]窦伟,张湜,蒋楠,等.基于子空间方法的精馏塔系统辨识建模研究[J].计算机仿真,2009,26(4):109-112.
[10]Mardi N A,Wang L.Subspace-based model predictive control in a noisy environment[J].InternationalJournal of Process System Engineering,2009,2(1/2):61-69.
[11]罗小锁.基于子空间辨识的预测控制方法研究[D].重庆:重庆大学,2011.
[12]吴平.基于子空间的系统辨识及其应用[D].杭州:浙江大学,2009.
[13]丁香乾,杨晓黎,杨华.非线性CSTR过程预测控制器设计[J].控制工程,2009,16(2):145-147.
[14]张辉,柴毅.一种改进的RBF神经网络参数优化方法[J].计算机工程与应用,2012,48(20):146-149.
[15]Lu M,Jin C,Shao H.An improved fuzzy predictive control algorithm and its application to an industrial CSTR process[J].Chinese Journal of Chemical Engineering,2009,17(1):100-107.
猜你喜欢
雪豆月读·低年级(2023年3期)2023-09-06 18:12:26
数学年刊A辑(中文版)(2020年3期)2020-10-27 02:44:16
中学生数理化·八年级物理人教版(2017年9期)2017-12-20 08:11:30
Coco薇(2017年8期)2017-08-03 02:06:57
中央民族大学学报(自然科学版)(2016年3期)2016-06-27 07:55:32
南都周刊(2015年4期)2015-09-10 07:22:44
南都周刊(2015年3期)2015-09-10 07:22:44
南都周刊(2015年1期)2015-09-10 07:22:44
噪声与振动控制(2015年4期)2015-01-01 07:08:05
中国有色金属(2014年2期)2014-04-11 02:39:53
