
一种主动型无线胶囊内窥镜微机器人
2015-04-13 04:08徐建省张亚男刘波李杰杨岑玉王金光宋涛
中国医疗器械信息 2015年10期
徐建省 张亚男 刘波 李杰 杨岑玉 王金光 宋涛
1 中国科学院电工研究所 (北京 100190)
2 武汉科技大学信息科学与工程学院 (武汉 430081)
0.前言
传统的胃肠镜等消化道检查会给患者带来极大的不适和痛苦,已经不能满足人们的需求。许多患者因为恐惧而放弃检查,使得疾病的诊断更为复杂和困难。同时为了提高消化道疾病的检查效率,能够进入人体消化道的胶囊内窥镜应运而生[1~6]。胶囊内窥镜是一种类似胶囊形状的微机器人,可通过吞服的方式进入人体消化道,在消化道内采集图像信息并通过无线方式传出体外,外部图像接收系统将图像接收后显示在计算机上供医生诊断,医生通过图像能够更加仔细地对人体全消化道进行观察与判断。用胶囊内窥镜来进行消化道疾病的诊断,不仅可以减轻患者的痛苦,而且可以对整个消化道进行全面的检查,是未来进行消化道疾病诊断乃至治疗的方向。2001 年以色列的Given Imaging 公司推出一款M2A 无线内窥镜消化道检测系统,已用于临床使用[7,8],其直径11mm,长30mm,采用纽扣电池供电,每秒可以采集2 帧图像,工作时间可达8 小时。2004年中国金山科技公司推出了“OMOM”胶囊内窥镜微机器人,能够以每秒2 帧的图像采集速度对消化道内壁进行拍摄,机器人的直径为11mm,长为26mm[9,10].
尽管现在已经有了胶囊内窥镜,但除了其使用成本昂贵外,其功能还有需要完善的地方。比如大多数还是被动型运动,该胶囊由口服吞下后,在体内的运动不受外部控制,依赖于胃肠道的蠕动和收缩而向前推进,无法主动控制其拍照角度、位置等。这样使得很容易错过病灶部位,或者医生很难对怀疑部位进行仔细观察。因为大多数胶囊内窥镜自然通过消化道的时间较长,不易做到实时拍照诊断,现在采用的方式还是先记录后诊断的方法,也就是先将拍摄的图像存储下来,等完成整个消化道的检查之后医生观看录像后进行诊断。另外图像采集质量和传输速率受到环境的影响较大,体积和功耗也不断需要改进。
针对目前临床上使用的胶囊内窥镜无法实现运动控制的问题,我们借鉴趋磁细菌的运动方式, 提出了一种主动螺旋推进结合外磁场导向控制的主动型胶囊微型机器人[11~14]。其尾部用螺旋桨或者柔性条带,推进微型机器人运动。其内部的永磁块, 通过与体外导向磁场的相互作用控制其运动方向。针对改善获得图像质量的方面,我们采用数字摄像头并通过2.4G 无线通道进行传输[6,15~16]。该方法在一定程度上使胶囊微机器人具有主动性,为新一代的胶囊内窥镜机器人提供了一条可行方案。
1.系统设计
我们提出的主动型胶囊内窥镜机器人的结构如图 1 所示。该系统主要包括胶囊内窥镜微机器人本体和体外的定位控制子系统、图像接收显示子系统。
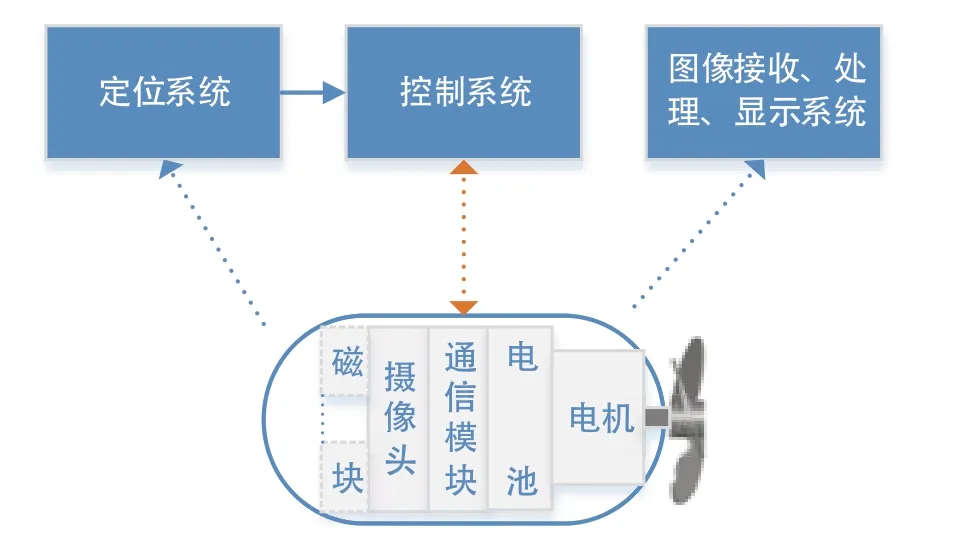
图 1. 主动型胶囊微型整体系统结构
胶囊微机器人的头部为半球形透明罩,下面依次为LED 灯(此处未画出)、磁块、摄像头、无线通信控制模块、电池、电机、螺旋桨。其中通信模块也是胶囊内窥镜机器人的控制单元,它一方面负责启动摄像头拍摄图像,获取摄像头图像数据并通过无线方式发送到体外;另一方面它接收外部的电机控制指令,控制电机的启停及转动速度,电机带动螺旋桨旋转从而控制胶囊的运动速度。其体内的磁块沿轴向磁化,在外部导向磁场的作用下控制胶囊的运动方向。
定位系统负责获得胶囊内窥镜当前的位置,供控制系统使用。控制系统主要负责规划胶囊内窥镜微机器人的运动路径,控制外部导向磁场的方向,给出控制电机转速的合适的指令等,从而控制胶囊内窥镜微机器人的运动速度、运动方向及启停胶囊的摄像功能等。
图像接收显示系统主要负责接收从胶囊微机器人传回的图像数据,将拍摄所得的图像实时显示在电脑屏幕上供医生诊断,同时也可将图像存储供医生随后进行诊断。
2.系统构成
我们的工作分为两个部分进行,一部分是实现对胶囊内窥镜机器人主动运动控制功能;另一部分是实现图像获取与无线传输部分。
2.1 运动控制功能实现
2.1.1 胶囊内窥镜微机器人
我们构造的胶囊内窥镜微机器人模型包括以下部分:外壳、永磁块、射频接收电路、微电机、钮扣电池和螺旋桨。微型机器人外壳的头部为半球形,下部为腔体,腔体内放置永磁块,射频接收电路,电机和电池。外壳底部有一个轴向通孔,电机通过轴向通孔与螺旋桨固连。机壳表面采用具有生物相容性的医用材料包覆,射频接收模块用于接收外部的脉冲信号,控制微型机器人的启动、停止以及推进速度。钮扣电池为微型机器人体内的电路和微型电机提供电源。我们研制的胶囊内窥镜微型机器人样机如图 2 所示,其直径为12mm,长度约为40mm,尾部为螺旋桨。
“五头并进”破除水利发展障碍——访湖南省水利厅厅长詹晓安………………………………… 田灵燕 ,李建章,王 琳(20.26)
2.1.2 控制系统
外部控制系统以一台计算机为核心,系统结构如图 3 所示。计算机通过DA 卡控制PWM 模块产生适当占空比的PWM 波,通过射频发射模块调制后发出。当胶囊内窥镜机器人收到携带PWM 波的射频信号后,经过解调控制内部电机启停、改变转速等。计算机上装有串口扩展卡,分别用于控制三个电源的电流,使得三对亥姆霍兹线圈中产生指定大小和方向的导向磁场,从而控制胶囊微型机器人的运动方向。实际构造的系统如图 4 所示。
2.1.3 定位系统
图 2. 主动型胶囊内窥镜机器人
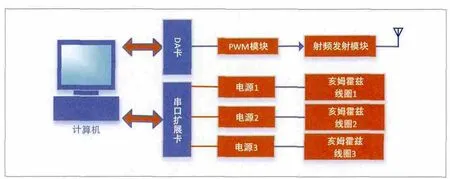
图 3. 胶囊机器人体外控制系统结构
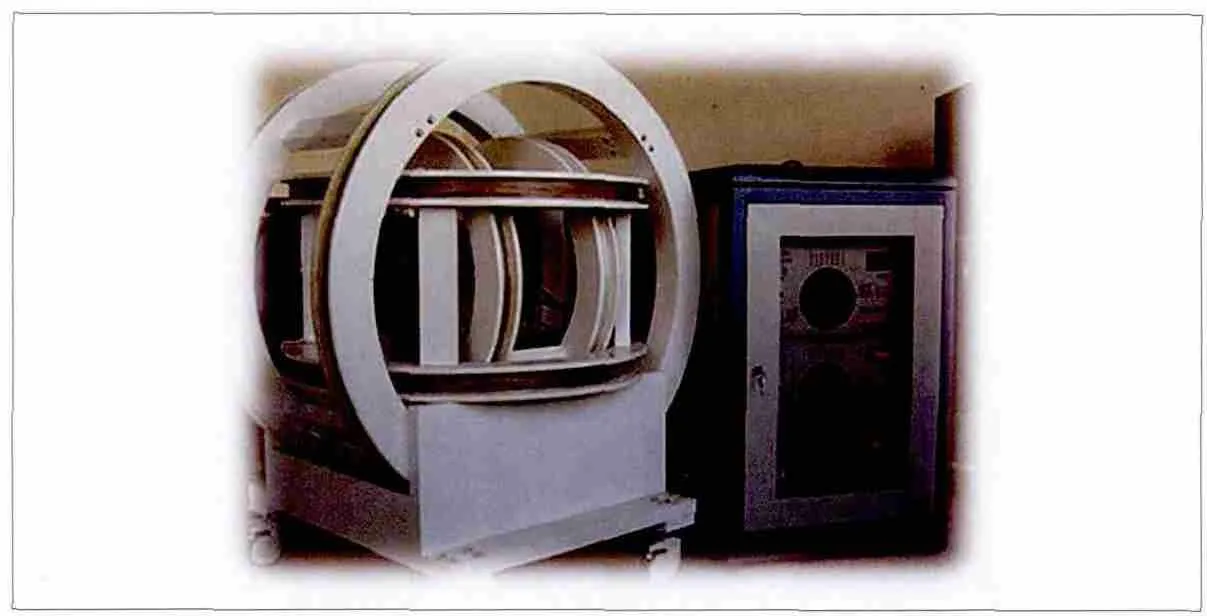
图 4. 磁场调控系统

图 5. 胶囊内窥镜微机器人磁定位系统示意图
要对胶囊机器人进行运动控制,首先要获得其当前位置及姿态。我们在系统设计中采用多传感器磁定位方法。在胶囊内窥镜微机器人运动空间的周围放置多个磁传感器,通过多个传感器所获得的信号,经过一定的算法处理得到胶囊内窥镜微机器人当前的位置和姿态。我们设计的胶囊内窥镜机器人定位系统如图 5 所示。
2.1.4 实验验证
(1)速度控制
通过实验验证了通过改变PWM 信号占空比来改变胶囊内窥镜微机器人运动速度可行性。实验得到的微型机器人运动速度和PWM 信号占空比的关系如图 6 所示,图中小方框为实验数据,实线为实验数据的拟合曲线。从图中可以看出, 微型机器人的运行速度也随着方波占空比的增加呈单调的递减, 从而可以通过改变PWM 波占空比的方法来改变微型机器人的行进速度。

图6. PWM 波占空比与胶囊内窥镜微机器人速度

图 7. 转弯运行轨迹

图8. 图像采集无线传输子系统
(2)转弯实验
我们在一个透明玻璃槽中进行了微型机器人转弯的运动实验。设起始时微型机器人的重心位置为坐标原点,实验时先加入平行于X 轴的均匀磁场,发射方波信号,使微型机器人运行,当运行到200mm 时, 将外部导向磁场旋转90 度与y轴平行。胶囊微型机器人在导向磁场的作用下完成转向动作,其重心的运动轨迹如图 7 所示,图中“□” 为实验数据点。实验结果表明,胶囊内窥镜机器人可以在导向磁场的作用下实现转弯。
2.2 图像无线采集功能实现
胶囊内窥镜微机器人需要进行图像采集并无线传输,为了提高所获得图像的质量并提高图像传输的抗干扰性能,我们选用带数据压缩功能的OV 系列数字图像传感器, 和2.4G 无线收发模块。选择的OV 图像传感器具有自动图像控制功能,包括自动曝光控制,自动增益控制,自动白平衡,自动带通滤波,自动黑电平校正。OV 系列带压缩功能的图像传感器可以直接输出压缩的JPEG 格式图像,从而可以大大降低所需要传送图像文件的大小,但可以满足对图像要求不是非常高的场合。选择的2.4G 无线收发模块其特点是体积小,功耗低,抗干扰性强。
系统构成的原理框图如图8 所示。系统主要包括两个子系统:图像采集与无线发送子系统,图像无线接收子系统。前者主要包括:摄像头模块和无线传输模块,后者主要包括无线收发模块和数据存储模块。
接收部分我们采用无线接收模块接收到图像数据,然后上传到PC 机供医生实时诊断。本文中我们主要介绍图像的采集和无线发送部分。
2.2.1 图像采集过程
我们选择的无线模块内部具有MCU,可通过串行相机控制总线设置OV 摄像芯片的内部寄存器,从而设定其工作模式,并能控制其工作状态。在需要拍照时,MCU 启动OV 摄像芯片开始拍照,并读取图像数据通过无线模块发送。在不需要拍照时使其进入睡眠或者低功耗模式,以降低整个系统的功耗。 图像采集部分的流程图如图9所示。主要包括无线模块初始化、摄像芯片配置程序、定时启动拍照,MCU 中断接收数据程序等。图像数据的读取和传输主要在MCU 的中断程序中处理。我们设计的实物模型如图 10 所示。
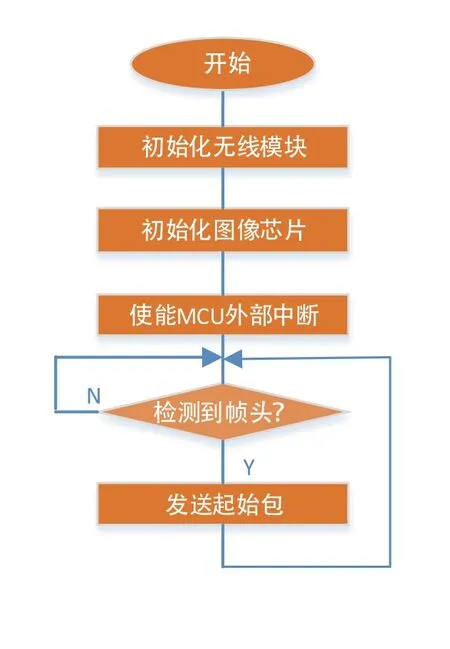
图9. 图像采集及无线发送流程

图 10. 图像采集实物模型

图 11. 水下拍摄的图像
2.2.2 实验结果
我们模拟人体消化道环境,在黑暗环境下,将启动工作后的胶囊内窥镜机器人放入水中进行测试,水下拍摄手掌上的黑点,得到图像如图11 所示。通过图像可以清楚地看到手掌上的纹路和黑点,图像拍摄速率可以达到每秒两幅CIF(352×288)图像。
分析图像采集速度受限原因有两个方面。其一是无线传输模块的空中传输速率。另一方面,无线模块中MCU 获取图像芯片图像数据速度受限。
3.结论
针对目前胶囊内窥镜产品中存在的被动运动及图像采集易受干扰的不足,本文给出了一种主动型胶囊内窥镜微机器人的设计方案,并通过实验验证了所提出方案的可行性。通过实物模型实现了胶囊机器人的运动控制,并从原理上验证了
通过微摄像芯片获取图像的可行性。下一步我们将进行整体设计,实现主动型胶囊内窥镜机器人,为下一代临床的胶囊内窥镜微机器人提供一个可行方案。
[1] 侯小丽, 刘雪. 胶囊内窥镜的研究进展,中国医疗器械信息, 2014,28-31
[2] 颜国正, 陈雯雯. 肠道内窥镜机器人研究进展. 生物医学工程学杂志,2015,01:214-217.
[3] 王晓民, 李远洋, 王新沛等. 消化道内窥镜的发展及趋势.医疗卫生装备,2013,34( 1) : 88- 90.
[4] 许飞, 颜国正, 朱柄全, 刘刚, 鲁丽. 视频胶囊内窥镜的改进设计与实验. 电子学报,2015,03:605-610.
[5] 辛文辉,侯逢勃. 主动式胶囊内窥镜系统设计. 测控技术,2014,10:13-16+21.
[6] 刘波, 程磊, 徐建省, 吴怀宇, 陈洋. 基于nRF24LE1 的无线胶囊内窥镜医疗机器人. 华中科技大学学报(自然科学版),2013,S1:293-296.
[7] Yu M. M2A capsule endoscopy. A break through diagnostic tool for small intestine imaging. Gastroenterology Nursing, 2002, 25(1): 24-27.
[8] Fireman Z, Paz D. Kepelman Y. Capsule endoscopy: Improving transit time and image view. World Journal of gastroenterology, 2005,11(37):5863-5866
[9] 彭承琳,皮喜田,郑小林.消化道微创诊疗系统的最新进展. 中国医疗器械杂志,2005,29(2):79-83.
[10] 刘翌宇,田德安,李荣香等.胶囊内镜检查失败原因分析及对策. 华中科技大学学报:医学版,2012,41(5):623-626.
[11] 杨岑玉, 宋涛, 王铮, 王金光, 王喆. 仿趋磁细菌的微型机器人研究. 机器人, 2009. 31(2): 146-150.
[12] Yang Cenyu, Song Tao, Wang Jinguang, Wang Zhe, Wang Qingmeng, Xu Jiansheng. Wireless Measurement and Control System for a Bio-inspired Mini-robot. 2011 IEEE InternationalConference on Robotics and Biomimetics, December 2011, Phuket, Thailand.
[13] Yang Cenyu, Song Tao, Wang Jinguang, Wang Zhe, Wang Zheng. Dynamic modeling of a novel bionic micro-machine. 2008 IEEE International Conference on Robotics and Biomimetics, December 2008, Bangkok, Thailand.
[14] 王金光, 杨岑玉, 王喆, 王庆蒙, 宋涛. 一种新型仿生微型机器人的无缆测控系统.机器人, 2010. 32(1): 34-40.
[15] 程磊,刘波,徐建省,吴怀宇,陈洋. 基于OV2640 的微型胶囊内窥镜系统设计. 传感器与微系统,2014,02:73-76+79.
[16] 李杰,程磊,徐建省,吴怀宇,陈洋. 基于彩色图像插值算法的胶囊机器人微视觉. 计算机测量与控制,2014,02:503-506+509.
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
现代仪器与医疗(2021年6期)2022-01-18
现代仪器与医疗(2021年4期)2021-11-05
感染、炎症、修复(2021年1期)2021-07-28
现代装饰(2021年2期)2021-07-21
中华养生保健(2020年3期)2020-11-16
中华养生保健(2020年2期)2020-11-16
小学生优秀作文(低年级)(2020年4期)2020-07-24
中国内镜杂志(2017年2期)2017-03-20
中国科技术语(2012年3期)2012-03-20
