利用高动态图像技术测量道路照明光度参数的原理及方法
2015-04-10 12:54宋佳音王立雄陈燕男
照明工程学报 2015年2期
宋佳音,王立雄,陈燕男
(天津大学,天津市建筑物理环境与生态技术重点实验室,天津 300072)
利用高动态图像技术测量道路照明光度参数的原理及方法
宋佳音,王立雄,陈燕男
(天津大学,天津市建筑物理环境与生态技术重点实验室,天津 300072)
随着城市道路交通系统的复杂化,立交桥、快速路增多,传统的道路照明测试方法难以满足现场实测的需求。基于高动态范围图像(High-Dynamic Range image,缩写为 HDRI)技术的光环境参数提取方法,可以解决以上问题。阐述了高动态范围图像的特点和获取方法,以及从高动态范围图像中提取亮度值的原理,并论证了采用高动态范围图像进行道路光环境测量的方法的可行性。
高动态图像技术;道路照明;光度参数
引言
高动态范围图像,顾名思义是具有很高动态范围的图像,具体来说,该图像从“最亮”到“最暗”间的亮度等级多,能表现出不同的亮度层次。高动态范围图像的原理是通过增加存储数据的宽度来提高像素数据的精度,或者采用浮点值来存储数据,提高图像所能存储的数据量和数据的精确度,从而实现高动态范围的目的。因此,高动态范围图像具有比传统图像更大的亮度数据存储,能够真实而全面地记录光度信息。目前,高动态范围图像的获取方法主要有两种:多次曝光法和图像传感器获取法[1-3]。在本研究中,研究对象为道路光环境,其光环境状态相对稳定,但道路交通条件情况复杂,考虑测试方法的便利性与安全性,采用分时曝光的方法获取高动态范围图像更为适宜。
1 采用高动态范围图像技术获取亮度值和照度值
1.1 数码相机感光特性及成像过程
人眼的对光的感知反应呈非线性变化,但是数码相机的成像原理则是以线性方式感知光线。数码相机的成像过程一般包括光线反射、曝光、光电转换、信号放大和模数转换重构等步骤。在这些数据转换的过程中非线性的场景照度E与图像灰度级Z之间的关系称为相机的感应曲线(Camera Response Function, 简称CRF)[4-8]。
高动态范围图像可以通过软件进行合成,其基本原理为通过求解数码相机感应曲线函数的逆函数,将图像由不断改变的灰度级(Z)空间转变回比较稳定的场景照度(E)空间[9]。
1.2 原理与参数标定
从高动态范围图像提取亮度值的原理可以分为以下几个方面(见图1)。

图1 从高动态范围图像获取亮度信息的步骤(图片来源:作者自制)Fig.1 The steps of getting information by the high dynamic range image
(1)Radiance作为高动态范围图像的存储格式,可以实现整数值的Ir′,Ig′,Ib′与相对应的浮点值Ir,Ig,Ib的转换,见式(1)。
(1)
(2)高动态范围图像的灰度值(Ir、Ig、Ib)与1931CIE-RGB 系统中的R、G、B三刺激值的转换。其中,图像灰度值(Ir、Ig、Ib)与1931CIE-RGB 系统中的R、G、B三刺激值的关系可以用函数fr、fg、fb表示,见式(2)。
(2)
(3)将所得的RGB三刺激值转换至XYZ色彩空间,见式(3)。
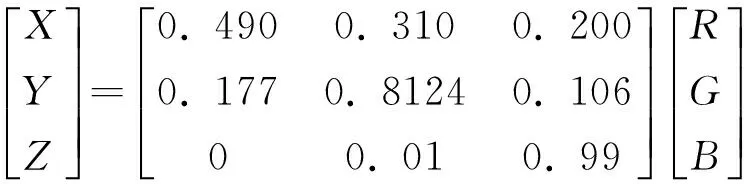
(3)
XYZ色彩空间中,Y刺激值与亮度成正比,即
(4)
其中,Kc是常数,表示Y值与实际亮度值的比例系数。
根据以上原理,可通过实验并对实验数据进行SPSS回归分析,研究R、G、B三刺激值与高动态范围图像灰度值间的一一对应关系,以此来标定函数fr、fg、fb,并求得Kc值,达到从高动态范围图像中提取亮度值的目的。
1.3 编制相关软件获取路面亮度和照度
为了便于操作,减少计算流程与在计算过程中可能产生的误差、提高精度,根据从高动态范围图像提取亮度值的原理,可将该亮度值的提取方法编制成软件。图2为软件的计算流程。
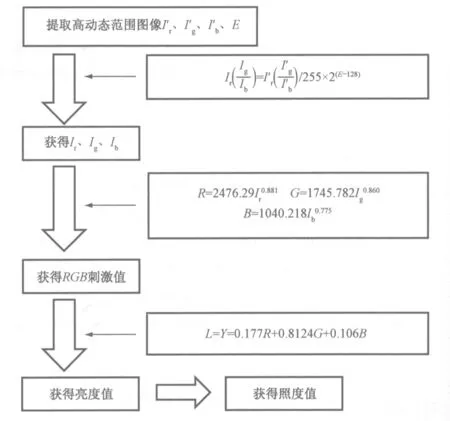
图2 亮度信息提取软件流程(图片来源:作者自制)Fig.2 The software of getting luminance information
经过软件开发,得到HDRviewer v1.4版本,可以通过在窗口中显示的“.hdr”格式的高动态范围图像上选取测点,以实现道路亮度值的读取,软件读取亮度值的界面见图3。同时根据道路的路面反射比(按均匀扩散材料计算),或路面亮度系数,可将采用高动态范围图像技术获取的亮度值转换为路面照度值。另外,根据立体角投影定律,可将采用高动态范围图像技术获取的光源亮度值转换为光源形成的照度值。
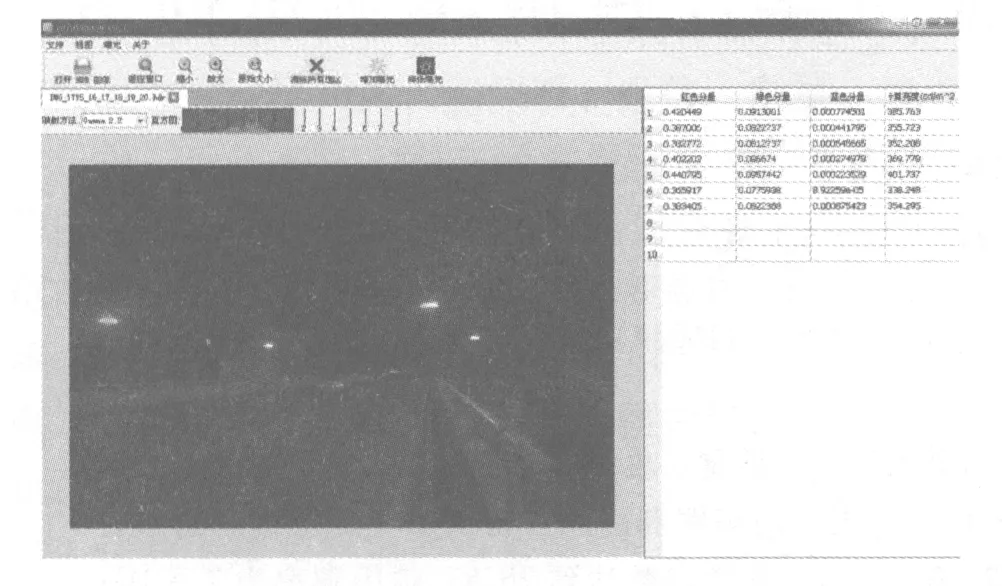
图3 HDRviewer v1.1 版本软件界面示意(图片来源:作者自制)Fig.3 Desktop of HDRviewer v1.1
1.4 软件的精度验证
选择一条道路进行亮度测试,分别采用高动态范围图像技术和BM-5A色度亮度计两种方法进行,比较分析得到的数据,进而讨论高动态范围图像方法提取亮度值的精度。实验道路宽度7.5米,灯杆间距32米,灯杆单侧布置。测试时将灯杆间平均分布27个测点,分别用“1,2,3,…”和“A,B,C”标识具体见图4。测试所得数据对比图,见图5所示。

图4 道路测点布置示意(图片来源:作者自制)Fig.4 Distribution of testing points of road
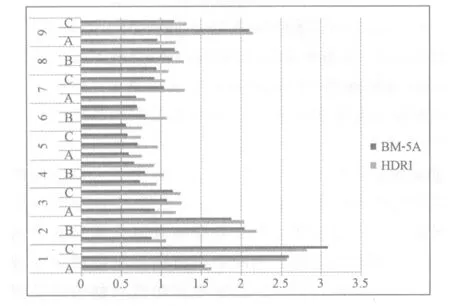
图5 采用BM-5A与高动态图像测得的亮度值(图片来源:作者自制)Fig.5 Luminance abtained by BM-5A and HDRI
从图4、图5中可以看出,除了个别的测点,以上两种方法测得的亮度值比较接近。
用SPSS软件进行Pearson相关性分析,得到两种方法测得亮度值的相关系数为0.991,说明两者间有显著的相关性。因此,利用高动态范围图像技术获取亮度值可信度很高。
2 小结
本文阐述了高动态范围图像的特点和获取方法,以及从高动态范围图像中提取亮度值的原理,即
(1)以Radiance作为高动态范围图像的存储格式,可以从高动态范围图像中提取灰度值Ir、Ig、Ib;
(2)根据高动态范围图像灰度值(Ir、Ig、Ib)与1931CIE-RGB系统中的R、G、B三刺激值之间的函数关系,将图像灰度值转换到RGB色彩空间;
(3)根据色度学原理,将所得的RGB三刺激值转换至XYZ色彩空间,进而获得到亮度值。
将从高动态范围图像中获取亮度值、照度值的转换过程编制成软件,并进行软件的精度实验,得到HDRviewer v1.4版本软件,从而简化操作,减少计算,提升效率,提高精度。精度实验表明,利用该软件从高动态范围图像中提取亮度、照度值的精度足以满足道路光环境测量的需求。
总体来说,采用高动态范围图像进行道路光环境测量的方法可行。而且,对比传统的亮度、照度测试方法,高动态范围图像技术具有多方面的优势[10-13]。
[1] 陈仲林,翁季,胡英奎,等.道路照明测量方法研究[J].灯与照明,2005,30(2).
[2] 王金华.高动态范围场景可视化技研究[D].北京:北京交通大学,2010.
[3] 葛成.高动态范围图像合成与配准技术研究[D].上海:上海交通大学,2010.
[4] 向遥.基于视觉感知的图像处理方法研究[D].长沙:中南大学,2011.
[5] Moeck M, Anaokar S. Illuminance analysis from high dynamic range images[J].Leukos,2006,3(2):211-228.
[6] Inanici M N. Evaluation of high dynamic range photography as a luminance data acquisition system[J].Lighting Research & Technology,2006,38(2):123-134.
[7] Martin Moeck.Accuracy of luminance maps obtained from high dynamic range images[J].Leukos,2006,4(2):99-112.
[8] Mardaljevic J, Painter B, Andersen M. Transmission illuminance proxy HDR imaging: A new technique to quantify luminous flux[J]. Lighting Research & Technology,2009,41(1):27-46.
[9] 沈天行,陈财生,王爱英. HDRI 图像在照明辅助计算中的应用[J].灯与照明,2004,28(4):28-29.
[10] 王嘉亮.高动态范围图像技术在建筑天然光设计中的应用[J].建筑学报,2010:37-39.
[11] Cai H, Chung T M,Improving the quality of high dynamic range images[J].Lighting Research Technology,2011,43:87-102.
[12] 王嘉亮.相机结合HDR图像技术在博物馆光环境分析中的应用与验证[J].照明工程学报,2011,22(5):68-73.
[13] 牛盛楠,王立雄,杨现国.立交桥高杆照明干扰光与TI 值研究[J].照明工程学报,2007,18(2):25-27.
The Principles and Methods to Measuring Road Lighting by High Dynamic Image Technology
Song Jiayin, Wang Lixiong, Chen Yannan
(TianjinUniversity,TianjinKeyLaboratoryofArchitecturalPhysicsandEnvironmentalTechnologyTianjin300072,China)
As the urban road traffic system getting more complex, just like the increasing overpasses, traditional testing methods can not fit the need of field measurement. This research is based on the method of parameter extraction by light environment of high dynamic range imaging technology (High-Dynamic Range image, HDRI). The method can be used to solve the above problems. It elaborates the characteristics of high dynamic range image, the access methods and the principle of exacting brightness values from high dynamic range image. The feasibility of using the method to measure the road light environment was also demonstrated.
high dynamic image technology; road lighting; photometric parameters
国家自然科学基金项目——“基于高动态图像技术的城市立交桥照明安全研究”(课题号:51178299),天津市科委基金项目——“近明视觉中间视觉的LED道路照明功效及节能研究”(课题号:10JCYBJC03800)
TM923
A
10.3969/j.issn.1004-440X.2015.02.005
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
家庭影院技术(2021年6期)2021-07-28
辽东学院学报(自然科学版)(2021年1期)2021-03-12
天津医科大学学报(2021年1期)2021-01-26
摄影之友(影像视觉)(2019年3期)2019-03-30
照明工程学报(2017年3期)2017-07-10
小天使·六年级语数英综合(2017年5期)2017-05-27
自动化学报(2017年5期)2017-05-14
浙江理工大学学报(自然科学版)(2015年7期)2015-03-01
浙江大学学报(工学版)(2015年1期)2015-03-01