基于图像处理的投弃式温深仪探头姿态测量研究*
2015-04-08 06:41赵江涛张锁平张东亮
传感器与微系统 2015年3期
赵江涛, 张锁平, 张东亮, 董 涛, 刘 宁
(国家海洋技术中心,天津300112)
基于图像处理的投弃式温深仪探头姿态测量研究*
赵江涛, 张锁平, 张东亮, 董 涛, 刘 宁
(国家海洋技术中心,天津300112)
为改进国产投弃式温深仪(XBT)的下降速率公式,采用基于图像处理的方法测量XBT 探头的运动参数。采用背景差分法获取差分图像,选择合适的阈值并对差分图像二值化,标记二值图像中的连通区域,将二值图像分割为几个互相独立的区域。通过计算分析各连通区域的特征集合来识别XBT探头。利用探头中轴线描述探头的运动姿态,将探头的长轴作为探头的初始中轴线,然后通过迭代优化的方法得到更加精确的结果。实验结果表明:该方法角度测量平均误差小于0.5°,能满足XBT探头姿态测量精度要求。目前已将基于该算法搭建的视觉测量系统应用于XBT投放实验中,取得了令人满意的结果。
投弃式温深仪; 下降速率公式; 图像处理; 中轴线法;姿态测量
0 引 言
投弃式温深仪[1](XBT)是一种快速机动测量海洋温度剖面的投弃式测量传感器,广泛应用于海洋环境调查、科学研究以及国防军事等领域。XBT由探头、传输线、发射器和数据采集系统组成。XBT探头入水后即开始海水温度的测量,XBT探头在下落过程中释放内藏的传输线,XBT所测温度经传输线传送到与其相连的船上数据收集系统。为了确定海水的温度剖面曲线,需要将所测温度与相应的海水深度对应。XBT不携带压力测量元件,其下落深度需通过一个经验公式又称下降速率公式[2](falling rate equation,FRE)计算得到。计算公式准确与否直接影响了XBT温度剖面曲线的可靠性,这一问题至今仍是世界各国学者讨论的热点。XBT探头的下降速率公式与探头的本身性质有关,同时也受投放环境的影响。相同类型的XBT探头具有相同的下降速率公式,然而不同的投放状态使得同类型探头在入水时刻有不同的速度与姿态。为探究XBT探头入水时刻的速度和姿态对下降速率公式深度计算精度的影响,本文采取基于图像处理的方法对XBT探头入水前下落过程中的运动参数进行测量和分析。
基于图像的运动目标三维姿态参数测量技术广泛应用于靶场测量领域[3,4]。目前对于火箭、炮弹、导弹等这类轴对称回转体目标,主要通过提取2台或多台相机同一时刻采集图像上的目标中轴线来解算目标的三维姿态角。目前常用的中轴线提取方法包括:人机交互法、基于轮廓[5]的方法、基于Hough[6]变换的方法等,这些方法大多通过提取目标的直线边缘特征然后计算目标的中轴线方程。当目标的尺寸相对较小且不存在直线边缘时,这些方法将不再适用。针对流线型的XBT探头及其它不存在直线边缘特征的运动目标,本文提出了基于长轴的迭代优化方法来提取目标的中轴线方程,基于该算法所搭建的测量系统已应用于XBT下落实验分析中,取得了一系列的实验数据。
1 XBT探头运动图像中轴线提取
实验中收集到的XBT下落图像如图1中各子图所示。

图1 实验中所收集的XBT探头下落图像
1.1 XBT探头轮廓区域提取
为测量XBT探头姿态需要提取探头的中轴线方程,探头的中轴线方程提取在很大程度上依赖于探头轮廓区域的精确获取。本文采取如图2所示的流程提取下落过程中XBT探头的轮廓区域。

图2 探头轮廓区域提取流程
采用空域中值滤波平滑图像以减少摄像机抖动和椒盐噪声的影响。利用统计平均法构建背景,通过背景差分法去除背景获取运动目标轮廓。对差分图像采用最大类间方差法二值化处理得到包含XBT探头的二值化图像,对得到的二值化图像采用形态学开运算去除小的背景干扰。采用基于区域的标记分割方法[7]对得到的二值图像分割,只保留面积大于某阈值的目标物,分割后的图像是互不连通的二值区域。计算每一个连通区域的特征属性(线度、偏心率、占空比)形成连通区域描述的集合,从而可以快速检测连通区域是否为XBT探头轮廓区域。其中,定义线度C=P/A,P为连通区域的周长,A为连通区域的面积。偏心率E=M/N,M为连通区域长轴,N为连通区域短轴。占空比B=S/C,S为连通区域面积,C为连通区域最小外接矩形面积。
对于XBT下落过程中的某帧图像经过连通区域分割后图像包含两个连通区域(如图3),区域A(探头区域)和相似区域B(干扰),分别计算2个连通区域的特征属性如表1所示。通过分析每一个连通区域的特征属性集合,可以快速地分割出感兴趣目标的轮廓区域[8]。

图3 连通区域分割后图像

表1 各连通区域特征属性
1.2 基于长轴的迭代优化中轴线提取算法
本文通过迭代的方法对探头的中轴线方程优化提取,迭代优化过程如图4所示。

图4 中轴线优化提取流程
在探头轮廓区域完成分割的前提下,定义探头轮廓区域A的直径为:Diam(A)=max[D(pi,pj)]。其中,D是距离的度量,pi和pj是轮廓边界上的点。探头的长轴为连接探头轮廓区域直径的2个端点所表示的线段的长度与方向。目标长轴通过基于重心的快速算法[9]予以计算,探头的长轴并不能精确地描述探头的姿态,需要进一步优化提取探头的中轴线方程,具体算法如下:
1)通过重心法求得探头整体区域的质心C0为(u0v0)。假设所求的XBT轮廓区域长轴为L0:y=k0x+b0,将L0作为探头的初始中轴线方程。
2)过探头轮廓区域的整体质心C0且垂直于直线L0可以确定一条直线,该直线将探头轮廓区域分为面积大致相等的两部分P1,P2。
3)利用重心法求得XBT轮廓P1部分的质心C1为(u1v1),过C0和C1两点确定一条直线L1:y=k1x+b1。
4)比较2次计算得到的直线L0,L1的斜率k0,k1,当2次求得直线方程的斜率差别小于Ta时将新求得的直线L1作为XBT探头最终的中轴线方程。其中,Ta可以根据实际需求与实验方法确定。若2次求得的直线方程不满足上述条件,则将新求得的直线L1作为探头的初始中轴线方程,即令L0=L1,并返回步骤(2)。当迭代次数大于一定限制但仍未满足上述条件时也应停止迭代,并将最后一次求得的直线L1作为探头的中轴线方程。
图5中实线为优化提取后中轴线,虚线为探头的初始中轴线。通过迭代优化提取中轴线的方法不依赖于探头的边界而是与探头的整体轮廓区域有关,即便探头轮廓区域未能完整分割时,通过迭代优化的方法所提取的中轴线仍然能保持较高精度。由于运动目标的长度要远大于其宽度,一般来说通过2~3次迭代即可得到较高精度的中轴线方程,算法的实时性也可得以保证。

图5 图像中轴线提取结果
2 实验与分析
2.1 实验验证
为验证本文方法的可行性与数据的有效性,对静态图像进行测试测量。将XBT探头以标准角度摆放,调整相机角度使成像平面与探头所在平面尽量平行并多次测量,所得实验数据如表2所示。
实验表明:利用本文算法能较为精确地计算探头的姿态角,测量平均误差小于0.5°。通过迭代优化方法得到的中轴线方程能精确地表征探头的姿态,尤其是当探头轮廓区域不能完整提取时,通过迭代优化方法所计算的探头的中轴线方程更为稳定、精确。探头中轴线的提取精度决定了姿态角的测量精度。目标成像的大小和轮廓能否完整分割对中轴线的提取精度有直接影响,当探头轮廓区域较大且能完整分割时能取得较高的精度的中轴线方程。
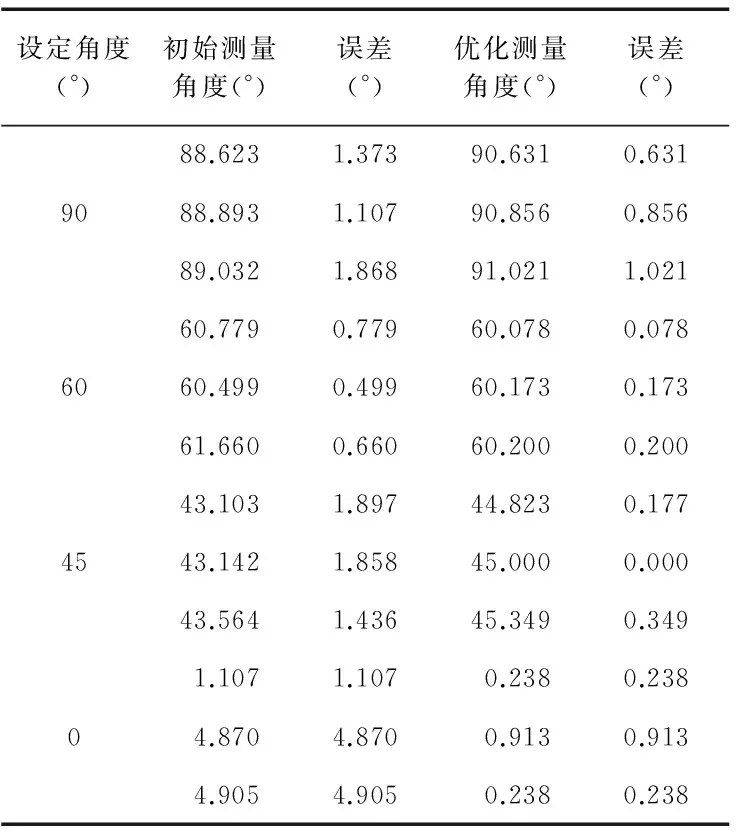
表2 XBT探头姿态测量结果
2.2 XBT探头投放实验
目前已经将基于本文算法所搭建的图像测量系统应用于XBT探头下落实验分析研究中,将XBT探头在5 m高的平台投放,其下落过程中探头中轴线与竖直方向的夹角测量结果如图6所示,对不同角度投放的XBT探头跟踪测量得到了大量的实验数据。

图6 下落过程中角度变化
3 结 论
为改进国产XBT下降速率公式的测量精度,采用基于图像处理的方法测量XBT探头下落过程中的姿态参数。针对XBT探头的外形特点和下落过程,提出了基于长轴的迭代优化方法来提取探头的中轴线方程。仿真与实验证明:所提出的运动参数测量方法是可行的,并可取得较高精度。基于本文算法所搭建的视觉测量系统已成功应用于XBT探头运动参数测量实验中,为XBT下降速率公式的改进提供了物理实验方法。
[1] Xiao Hong,Zhang Xinhua.Numerical investigation of the fall rate of a sea-monitoring probe[J].Ocean Engineering,2012,56:20-27.
[2] Francis Bringas.The first meters of the XBT fall[C]∥The Second XBT Science Workshop,Victoria:NOAA,2013.
[3] 于起峰,孙祥一,陈国军.用光测图像确定空间目标俯仰角和偏航角的中轴线法[J].国防科技大学学报,2000,22(2):15-19.
[4] 温聚英,路 鹰,梁雅军,等.基于立体视觉的飞行器运动姿态测量技术及其应用[J].宇航计测技术,2013,33(2):13-14.
[5] 张 荣,黄海莹,卫剑锋,等.基于图像处理的炮弹运动参数检测技术[J].红外与激光工程,2008,37(2):293.
[6] 康文静,丁雪梅,崔继文,等.基于改进Hough变换的直线图形快速提取算法[J].光电工程,2007,28(1):143-1146.
[7] 冈萨雷斯.数字图像处理[M].2版.北京: 电子工业出版社,2006:482-485.
[8] 张法全,郑承栋,沈满德,等.水下运动目标实时检测算法研究[J].光子学报,2009,38(6):1558.
[9] 张法全,王国富,曾庆宁,等.利用重心原理的图像目标最小外接矩形快速算法[J].红外与激光工程,2013,42(5):1383-1385.
Study of pose measurement for XBT probe based on image processing*
ZHAO Jiang-tao, ZHANG Suo-ping, ZHANG Dong-liang, DONG Tao, LIU Ning
(National Ocean Technology Center,Tianjin 300112,China)
In order to improve domestic-made XBT fall rate equation(FRE),use method based on image processing to measure movement parameters of XBT probe.Difference image is obtained by background difference method, appropriate threshold is selected and binaryzation of difference image is carried out,connected region of binary image is labeled and binary image is divided into several independent regions.The XBT probe is recognized by calculating and analyzing characteristic set of each connected region.Motion posture of probe is described by central axis of probe,long axis of XBT probe used as initial central axis of probe, and iterative optimization method is used to get more precise results.The experimental results show that average error of angle measurement is less than 0.5° and the algorithm satisfies precision requirement of posture measurement of XBT probe.Vision measurement system based on this algorithm has been applied in XBT deployment experiments and results are satisfied.
XBT; fulling rate equation(FRE); image processing; axis method; pose measurement
10.13873/J.1000—9787(2015)03—0028—03
2014—07—15
国家海洋公益性行业科研专项经费资助项目(201305033);国家自然科学基金资助项目(41206031)
TP 391
A
1000—9787(2015)03—0028—03
赵江涛(1988-),男,山东滨州人,硕士研究生,研究方向为图像处理与视觉测量。
猜你喜欢
北京测绘(2022年10期)2022-11-04
装备制造技术(2020年1期)2020-12-25
房地产导刊(2020年10期)2020-11-16
学生天地(2020年3期)2020-08-25
制造技术与机床(2019年11期)2019-12-04
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
中国交通信息化(2017年4期)2017-06-06
中国工程咨询(2013年6期)2013-02-13
体育师友(2010年6期)2010-03-20