
基于ExcelVBA的隧道施工中盾构姿态测量的研究
2015-04-05 12:13陈东东
河南科技 2015年22期
陈东东
(云浮市地理信息中心,广东 云浮 527300)
1 引 言
盾构掘进是隧道施工的主要手段。在隧道施工前,在盾构盾体上安装了3个以上棱镜,在一个局部坐标系内,测得(或获得)棱镜坐标和盾构特征点(顿首中心点、顿尾中心点)的坐标。因为棱镜与盾构固连在一起,在盾构掘进过程中,其内部关系不会变化,通过观测任意时刻的棱镜的测量坐标,就可以通过坐标转换计算,得到盾构特征点的测量坐标,并将其与设计值比较,便可以得到盾构与设计线的偏离数据,从而指导施工。
2 计算盾构特征点(盾首、盾尾)坐标的数学模型
盾构机上有若干个观测点,但只要测出其中的任意三个点(最好取左、中、右)的在测量坐标系下的坐标,就可以计算出盾构特征点的测量坐标系下的坐标,从而进一步推算盾构机的姿态和位置参数等。因为涉及到盾构坐标系和测量坐标系,为表述清楚,后面以(x,y,h)表示盾构坐标系的坐标,以(xx,yy,hh)表示测量坐标系的坐标。
2.1 联合数据处理的数学模型
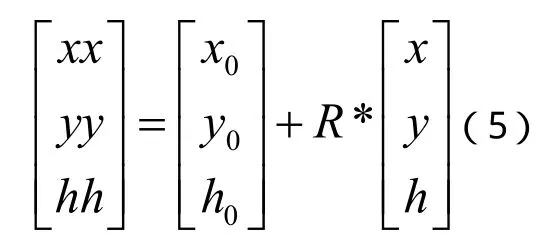
根据欧拉变换公式,测量坐标系与盾构坐标系的转换公式为:

对式(7)可以使用间接平差方法解算,步骤如下:
测定了N个观测点,则有3N个误差方程;
用间接方法求解六个参数的改正数;
计算六个参数的最新值;
根据改正数的大小判别是否满足收敛要求,若不满足,以计算出的六参数的最新值作为新的近似值,重复步骤(2)-(5),直到满足收敛要求;
计算最终的坐标转换六参数;
根据坐标转换六参数,计算盾构特征点(盾首、盾尾中心点)的测量坐标系坐标。
3 基于ExcelVAB编程实现
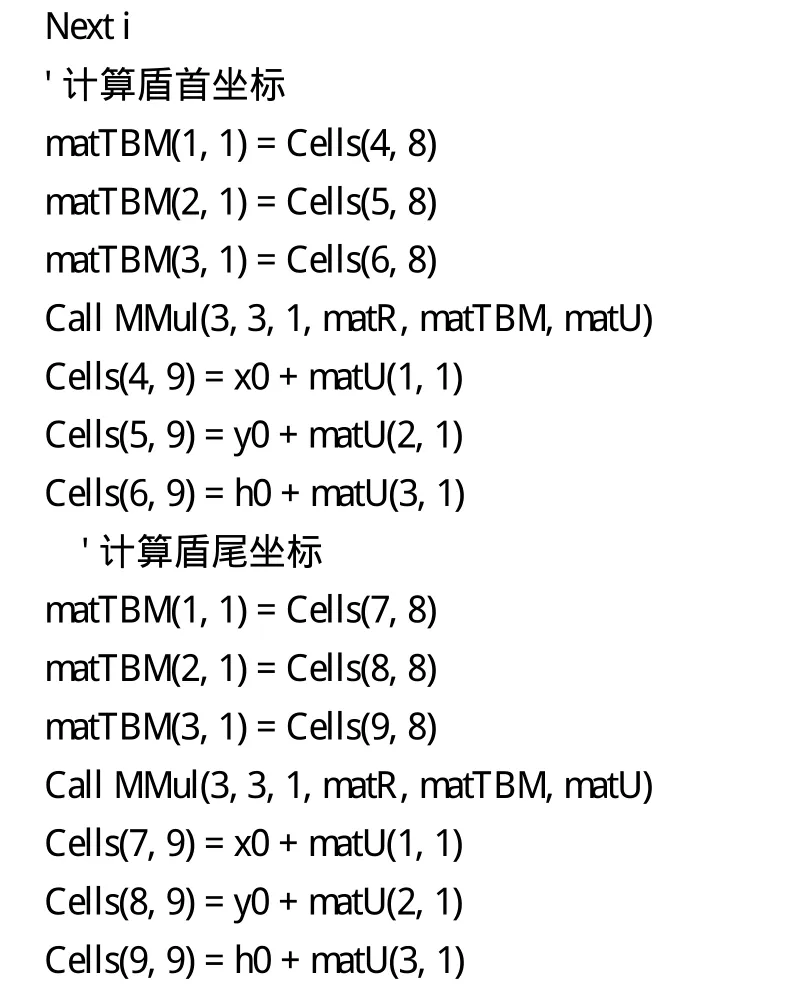
可以发现,整个计算过程非常繁琐,涉及矩阵和多次迭代计算,几乎无法用手工计算,必须使用编程来完成计算。根据数学模型,使用的关键代码如下:
模型的编程实现界面及计算结果如图1所示:
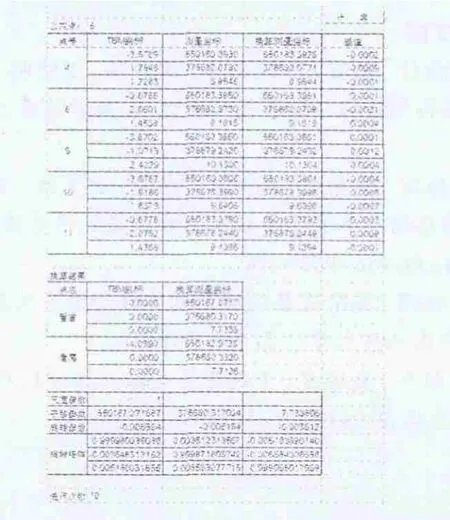
图1 实现界面及计算结果
4 结束语
本文的盾构姿态测量方法已在某盾构工程中得到应用,算例中模型计算的成果与SLS-T激光自动导向系统的成果十分接近,误差也在规范范围内。此技术方法保证了数据成果的可靠性,可指导实际工程作业。
[1]王中伟.卡西欧fx-5800P计算器与道路施工放样程序[M].广州:华南理工大学出版社,2011.6.
[2]贺磊,方坤,高俊强.人工修复盾构姿态错误的测量方法与精度探讨[J].南京工业大学学报:自然科学版,2012,34(1):109-112.
[3]谭诚,蔡洪,黎洪.盾构法隧道施工测量精度控制方法研究[J].建材与装饰,2012(3):174-175.
[4]韩静玉.隧道工程洞内测量控制方法及精度控制方法分析[J].铁道勘察,2011, 37(2):4-7.
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
计算机技术与发展(2020年8期)2020-08-12
电脑报(2020年12期)2020-06-30
少儿美术(快乐历史地理)(2020年4期)2020-02-24
电脑报(2019年4期)2019-09-10
学苑创造·A版(2019年4期)2019-05-10
中国房地产业(2016年9期)2016-03-01
工程建设与设计(2016年4期)2016-02-27
大众摄影(2015年9期)2015-09-06
物理实验(2015年8期)2015-02-28
