
基于PLC的PU在线振摇机控制系统设计
2015-04-01 06:17:33李晓林赵贤林
实验室研究与探索 2015年12期
李晓林, 赵贤林
(南京农业大学 工学院, 江苏 南京 210031)
基于PLC的PU在线振摇机控制系统设计
李晓林, 赵贤林
(南京农业大学 工学院, 江苏 南京 210031)

针对一种PU在线振摇机设计了基于PLC的气缸驱动的电气控制系统。首先介绍了振摇机的基本机械结构以及它的工作流程和原理,然后根据振摇机的工作原理与工艺过程,完成了系统的硬件配置与软件设计,包括控制电路的分析、PLC的机型选择、I/O地址分配及接线、PLC程序设计。系统实现了全自动、急停、复位等功能,具有操作简单、可靠性高、抗干扰能力强、稳定和维护方便等优点。其次,系统基于MCGS嵌入版组态软件,设计了MCGS触摸屏作为人机交互界面,使其与PLC进行通讯,获取实时监控数据,同时加入了系统手动调试界面,为系统的调试带来了很大的方便。该系统经过一个月的现场运行测试,表明本系统稳定,可靠,能够满足现有的30瓶/次的在线实时振摇。
可编程逻辑控制器; 振摇机; 组态软件
0 引 言
聚氨脂泡沫(Polyurethane Foam, PU)在线振摇机是一种在生产流水线上对已经封装完成的化学药剂进行摇晃使其充分混合均匀的设备。在工业生产的很多领域都离不开振摇这一环节,如在农药[1]、喷雾剂、消毒液[2]等领域中,都有化学药剂封装后必须将其进行摇晃使其混合均匀的工艺过程。研究一种适于流水线振摇机自动控制系统代替人工振摇动作是适应生产工艺不断更新的需要[3]。本文针对PU在线振摇机设计了一套基于PLC的自动控制系统实现对它的在线实时控制。首先介绍了振摇机的结构、工作流程与原理以及可编程逻辑控制器的结构等;然后根据振摇机的工艺流程来设计了控制系统的硬件电气原理图、系统控制程序。该系统通过实际在线调试,表明整个自动控制是稳定、可靠的,符合工业生产的在线控制要求。
1 PU在线振摇机简介
1.1 结 构
PU在线振摇机具有结构简单、操作方便、容易维修等特点,对药剂的充分混合具有很好的效果。该设备结构主要由前端制动星轮、后端挡板、机械臂、提升装置、气囊、接近开关、光电开关组成。
制动星轮安装在流水线生产台上机械臂的前端处,负责是否阻止药剂瓶进入机械臂;光电开关安装在制动星轮和后端挡板的位置,来记录进入机械臂和从机械臂出去的药剂瓶的数量;后端挡板安装在药剂瓶从机械臂出去的位置,当药剂瓶进入机械臂时阻挡药剂瓶从机械臂后端离开;提升装置安装在机械臂的下端,用来将机械臂提升到振摇位置;气囊安装在机械臂两侧,用来给机械臂提供振摇动力;机械臂用来夹紧进入两臂之间的药剂瓶;接近开关用来判断机械臂、提升装置的位置[4]。
1.2 工作流程及原理
振摇机设备所有的可以动作的部件都由气缸的收缩来驱动。在生产过程中,当封装好的药剂瓶通过该设备时,首先通过前段挡板处,此时前端制动星轮处于收缩放行状态,后端挡板处于伸张关闭状态,在前段制动星轮处装有一光电开光负责计数[5]。当计数完成达到预设的数目时,前端制动星轮马上处于伸张关闭状态,阻止流水线上的药剂瓶进入前后挡板之间,同时机械臂的一只臂伸张将进入两挡板之间的药剂瓶夹紧,然后提升装置将夹着药剂瓶的机械臂提升到一定位置,通过接近开关检测到机械臂提升到位后锁紧气缸将提升装置下端锁紧,防止机械臂摇晃时导致提升装置下降出现事故,之后机械臂在气囊的鼓动下来回摇晃,使药剂混合均匀[6]。在后端气囊处装有一个接近开关来记录振摇次数,当振摇次数达到提前所设定的数目后,气囊停止工作,机械臂停止振摇,此时,锁紧气缸收缩,然后提升装置下降,下降到位后机械臂的一只臂收缩不再夹紧,后端挡板处于收缩放行状态,药剂瓶在皮带的作用下依次从挡板间离去,同样在后端挡板出也装有一个光电开关负责计数,当计数完成时,后端处于挡板伸张关闭状态,前端制动星轮处于收缩放行状态,此时开始下一个循环[7]。
2 系统硬件设计
2.1 研究内容
依据振摇机的工作原理及生产工艺过程来进行控制系统的设计(包括硬件与软件编程)和人机界面的设计[8]。其中主控系统采用PLC控制,能够满足振摇机的生产工艺要求,能够实现自动、半自动以及手动操作,便于调试,运行中可实现正常停止、急停。人机界面采用组态软件进行设计,可以设置管理员账户和密码,还可以进行实时监控,查看当前的振摇次数、进入振摇机的产品个数、离开振摇机的产品个数等数据,方便工作人员监视查看。
2.2 系统硬件设计
控制器选型的根据主要是机械设备工作时的流程和特点。PLC以及相关设备器材应该是标准的、集成的,依照容易与工业生产控制的系统构成一个整体和易于扩展功能的规则[9]。根据PU在线振摇机的工业过程,选用西门子S7-200PLC作为主控制器[10]。通过控制中间继电器来控制电磁阀,通过电磁阀来控制气缸的伸缩来实现振摇机工作[11]。电磁阀需要24 V直流供电, 并且PLC的输入端和输出端也需要24 V直流供电。根据振摇机控制系统的要求,对系统控制的I/O地址进行了具体分配如表1所示。
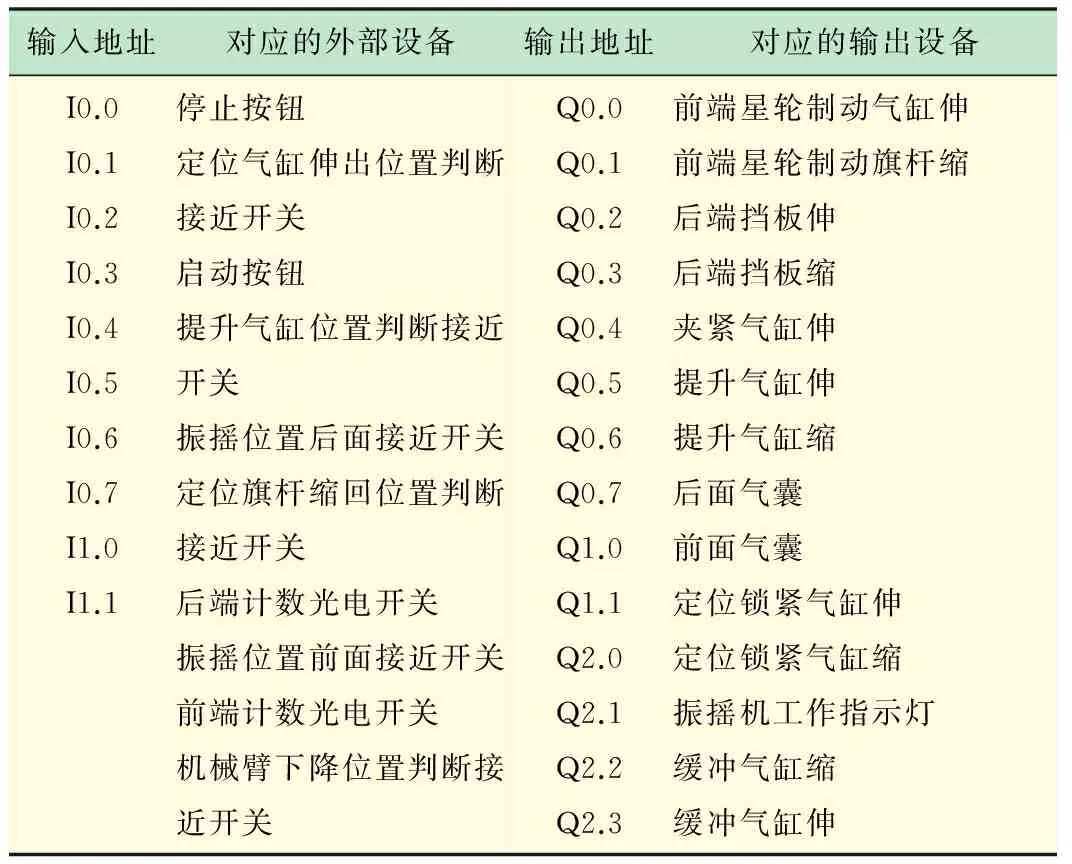
表1 输入输出I/O地址分配表
2.3 控制系统外部接线原理图设计
现根据以上的统计和选择对控制系统的外部接线原理图设计如图1所示。
3 系统软件设计
3.1 系统流程图
根据振摇机的工作流程及生产工艺画出系统的工作流程图,见图2。

图1 PU在线振摇机机械设备实物图
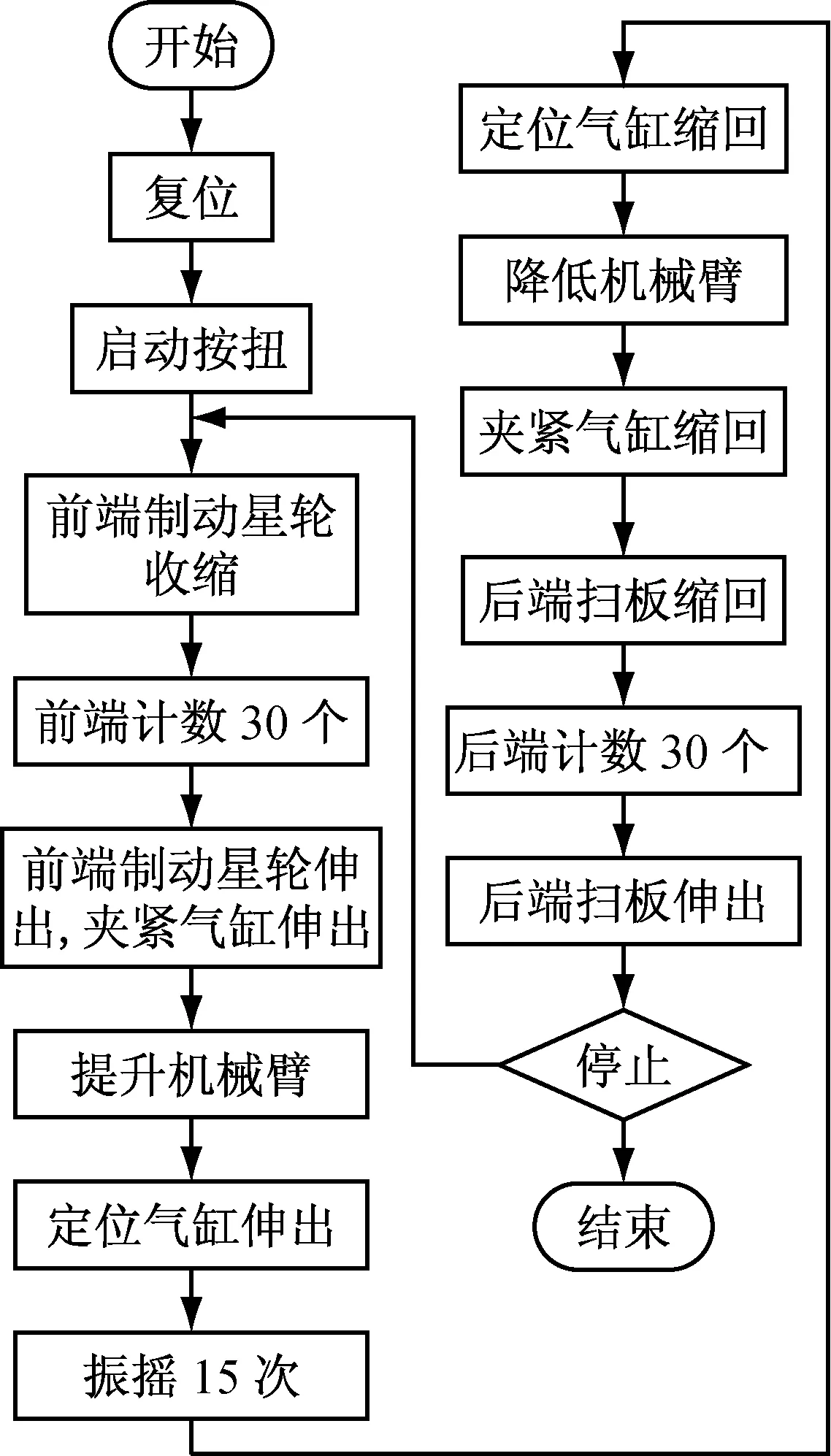
图2 系统流程图
3.2 程序调试
在程序设计中,根据工艺要求,当后端计数完成后,前端制动星轮才会缩回。所以需要针对此问题优化调试程序如图3所示。将后端计数分别用两个计数器来计数,当C30计数到5个时,前端制动星轮缩回,C10开始计数,当C10计数到25时,后端挡板伸出[12]。在主程序运行时,会调用复位子程序和振动子程序。当调用这些子程序,执行完子程序后,返回到主程序继续运行如图4所示。
3.3 人机界面设计
为能够实时获取工业现场数据信息,设计组态监控系统,对振摇机的运行状态和一些数据信息进行读取,从而在监控界面中,方便工作人员及时了解振摇机的工作状态和数据。界面编制用到组态软件,它具有开发周期、开放性好、适应性强、经济、易于扩展等优点[13]。
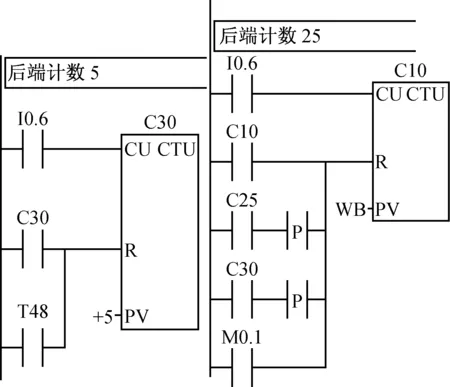
图3 主程序调试

图4 子程序调试

图5 手动调试窗口
当振摇机发生事故或故障时,设计了振摇机手动调试窗口如图5所示。
在组态工程建立完毕之后,在MCGS嵌入版组态软件的文件下拉菜单中选择进入运行环境选项,在弹出的窗口中点击工程下载,点击启动运行,进入运行环境,在此界面中可以登录系统和进行账户设置,在账户设置里可以修改密码和添加用户,不过只有管理员负责人有权限添加和删除用户[14]。点击登录,输入相关负责人或操作员的用户名和密码,点击确定会到成功登录界面,登录到系统[15]。点击进入系统后,会首先进入到PU振摇机实时监控平台,在这个界面可以监控当前进入机械臂之间的药剂瓶数量和从机械臂出去的药剂瓶数量,以及从启动到停止从机械臂出去的瓶子的总数,还可以监控当前振摇次数,并且通过增加和减少震动次数可以修改振摇次数。系统监控界面如图6所示。

图6 实时监控界面

图7 电气控制系统实物图
点击切换,会切换到PU振摇机手动调试界面,如图,在此页面可以翻边地控制振摇机设备的每一个动作,可以手动控制振摇机一步一步运行,通常是在机械设备出故障的情况下维修的时候使用,非工作调试人员请勿随意点击此界面,尤其是在运行过程中,否则将会导致事故发生。继续再当前页面点击切换的会切换到监控界面,点击返回,会返回到登录成功的界面。
5 系统调试分析
根据系统工艺以及硬件和软件设计方案,设计电气控制系统。该系统于2014年7月在南京浦口气雾剂专用设备制造厂进行现场调试,经过一个月的运行测试,结果表明本系统稳定,可靠,完全能够满足现有的30瓶/次的在线实时振摇。
6 结 语
本文介绍的PU在线振摇机控制系统设计,具有操作简单、可靠性高、抗干扰能力强、稳定和维护方便等优点,对药剂的充分混合具有很大的作用。目前已经开始应用于GQZY-30型机器流水线上,并获得实用新型专利[15]。本设计可通过进一步的改造,更广泛应用于其他类似需要进行振摇控制的仪器设备,市场前景颇为广阔。
[1] 江 健.基于FLUENT的农药射流混药器的仿真与优化研究[D].南京:南京林业大学,2013.
[2] 周凤芳.背负式喷雾机农药药水在线混合方法的研究[D].南京:南京林业大学,2012.
[3] 万夙鸣.喷雾机药水在线混合装置测试系统研究[D].南京:南京林业大学,2007.
[4] 王月芹. 基于PLC的机械手控制系统设计[J]. 液压与气动, 2011(9): 41-43.
[5] 邓重一.关电开关原理及应用[J]. 传感器世界, 2003(12):19-22
[6] 徐幼林.植保机械混药器及其农药在线混合性能研究[D].南京:南京林业大学,2009.
[7] 伍锦荣.可编程控制器系统应用与维护技术[M].1版.广州:华南理工大学出版社,2004.
[8] 薛迎成,王瑞臣.工业组态技术基础及应用[M].1版.北京:中国电力出版社,2009.
[9] 葛 玻,沈文杰,赵 旎.工控组态软件的对比及应用[J].计算机测量与控制,2002, 10(8):550-552.
[10] 戴仙金.西门子S7-200系列PLC应用与开发[M].1版.北京:中国水利水电出版社,2007.
[11] 姚伯威,吕 强.机电一体化原理及应用[M].北京:国防工业出版社,2004.
[12] 张鹤鸣.可编程控制器原理及应用教程[M].1版.北京:北京大学出版社,2007.
[13] 鹿玲杰,田燕燕.组态软件的设计与实现方法[J].大庆石油学院学报,2001,25(1):55-57.
[14] 马国华.监控软件及其应用[M].3版.北京:清华大学出版社,2003.
[15] 李晓林,赵贤林,路亮亮,等. GQZY-30型PU在线摇摆机电气控制系统.[P].中国专利,201420819046.1,2015-01-27.
·名人名言·
聪明的资质、内在的干劲、勤奋的工作态度和坚韧不拔的精神。这些都是科学研究成功所需的其他条件。
——贝费里奇
Design of Control System of PU Online Vibration Rolling Machine Based on PLC
LIXiao-lin,ZHAOXian-lin
(College of Engineering, Nanjing Agricultural University, Nanjing 210031, China)
For a kind of PU online cylinder driving vibration machine, its control system was designed based on PLC. First, the basic mechanical structure of the vibration machine and its working process were introduced. Then according to the principle of vibration wave machine and the technological process, the hardware configuration and software design of the system were completed, including the analysis of the control circuit, PLC model selection, I/O address allocation and PLC program design. The functions of automatic control, stop, reset etc were realized. The system has the advantages of simple operation, high reliability, strong anti-interference ability, stable and convenient maintenance etc. Second, human-computer interaction interface was designed via configuration software MCGS embedded edition. It can communicate with PLC and get real-time monitoring data. At the same time, a manual debugging interface was added, it could bring great convenience for the system debugging. The result of a month field running test showed that the system was stable, reliable and could satisfy the 30 bottles/online real-time vibrating.
programmable logic controller; rolling machine; configuration software
2015-08-13
中央高校基本科研业务费-科研平台实验技术人才基金资助 (KJSY201518)
李晓林(1973-),女,土家族,贵州思南人,本科,实验师,研究方向:实验室仪器的应用与开发。
Tel.:13851637152; E-mail:lixiaolin@njau.edu.cn
TP 273
A
1006-7167(2015)12-0110-04
猜你喜欢
中学生数理化·自主招生(2023年3期)2023-03-17 02:35:02
电站辅机(2021年4期)2021-03-29 01:16:52
河北农机(2020年10期)2020-12-14 03:13:42
电子制作(2018年12期)2018-08-01 00:47:44
制造技术与机床(2017年6期)2018-01-19 02:41:21
凿岩机械气动工具(2017年2期)2017-07-19 10:21:13
电子制作(2017年19期)2017-02-02 07:08:38
工业设计(2016年11期)2016-04-16 02:49:22
当代化工研究(2016年6期)2016-03-20 16:21:46
中国铸造装备与技术(2015年5期)2015-12-10 10:23:41
