基于多图像传感器的激光光斑采集与处理系统设计*
2015-04-01 12:19:12高世杰李一芒吴志勇
传感器与微系统 2015年11期
高世杰,盛 磊,李一芒,吴志勇
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春130033;2.中国科学院大学,北京100039)
0 引 言
随着科学技术的不断发展,多谱段成像技术已广泛应用于激光照明、无源战地预警、水下搜寻救援等领域中,采用多个波段的探测器成像,能够更全面、更准确地捕获待测区域多个谱段的辐射信息,从而具备更强的探测能力[1~3]。为进行比对,得出准确性相对较高的结论,中国科学院长春光学精密机械与物理研究所的课题组在开展近海面激光通信大气扰动模型参数测量实验时,引入多谱段成像技术,分别采用可见光相机和短波红外相机对激光光斑进行成像。一般在实际应用中,采用多个图像采集与处理系统,为了能够实现对多图像传感器采集的激光光斑图像的实时融合处理,需要将多图像传感器对应的采集与处理单元集成到一套系统中。
本文基于现场可编程门阵列(FPGA)+多核数学信号处理器(DSP)架构设计了双路图像采集与实时处理系统,
1 系统组成
所设计的双波段激光光斑采集与处理系统框图如图1所示,其主要工作原理为:短波红外相机和可见光相机在FPGA 生成的同步触发信号控制下采集图像信号,相机分辨率均设置为208×200,采集频率为500 Hz,红外数字图像与可见光数字图像经Camera Link 接口传输至图像处理系统中,FPGA 内部开辟资源接收并缓存数字图像信号,然后与DSP 按一定策略和算法对图像进行处理,所得结果由FPGA 内部开辟的PCI—e 通信单元传输至计算机中。

图1 采集与处理系统框图Fig 1 Block diagram of data acquisition and processing system
为提升硬件系统对卷积运算的并行处理能力,同时适应高频率数据采集条件下对内部缓存资源的要求,设计选用FPGA 器件和 DSPs。设计时选取 Xilinx 公司的XC5VLX110T 型高速FPGA 芯片作为系统的核心元器件之一。XC5VLX110T 型FPGA 内部资源丰富,共有17 280 个资源片,每个资源片内包括4 个LUT 和4 个触发器;拥有64 个DSP48E 数字信号运算内核,其中每个内核都包括1 个25×18 的乘法器,1 个加法器和1 个累加器;此外该型号FPGA 内部资源还包括:5 328 kb 块RAM,12 个时钟管理模块,6 个锁相环,1 个PCI—e 内核,680 个可供用户使用的I/O 资源。利用XC5VLX110T 型FPGA 内的功能内核和丰富的存储资源可以实现滤波与通信控制等功能。FPGA+8 核DSP 架构的处理单元是本文设计的实时采集与处理系统的核心部分,其逻辑单元设计框图如图2。

图2 逻辑单元设计框图Fig 2 Block diagram of logical unit design
核心器件的主要工作过程为:FPGA 的图像接受控制模块通过FPGA 的IO 资源控制,Camera Link 接口接收数字图像信号,数字图像在缓存模块和DDR2 所提供的存储资源条件下进行乒乓缓存,图像预处理模块图像预处理操作,FPGA 将预处理后的图像送入DSP 中进行复杂的图像处理运算,FPGA 与DSP 间的通信经SRIO 协议完成。设计8 核DSP 中的其中一个核为决策器和控制器,用于实现SRIO 通信协议,多核资源的分配与调度以及处理结果的整合,其它7 核将图像分为7 份进行并行处理,决策器对图像进行分片时设置一定的重叠区域。DSP 完成工作后将图像整合,经SRIO 回传至FPGA,FPGA 对图像进行目标提取,并在FPGA 内部开辟PCI—e 通信内核,将处理图像、目标位置信息和原始图像信息以DMA 方式按PCI—eX4 模式传入计算机中。系统硬件如图3 所示。

图3 硬件系统实物图Fig 3 Physical map of hardware system
2 算法设计
当激光通信链路经过大气时,由于受湍流的影响,系统所获得的激光光斑图像是退化后的图像,会导致对质心位置提取精度下降。工程中常用的形态学算子会使目标中心位置发生改变,影响光斑中心检测精度。国内外学者针对大气湍流导致图像退化提出的解决方法可归纳为三类:多帧重构法[4]、自适应光学法[5]和盲复原方法[6]。多帧重构法属于事后处理方法,其原理与实时性相矛盾;自适应光学实现方式复杂;盲复原方法若不进行迭代则复原效果不佳,若迭代次数过多则难以满足实时性要求。实验中,采用改进的激光光斑退化图像的快速盲复原方法,在对光斑图像进行快速复原的基础上,对光斑目标域进行分割,并通过连通域计算实时提取复原后的光斑中心位置信息。
经复原后的图像需要进行一系列处理,其算法流程如图4 所示。

图4 算法设计流程Fig 4 Design procedure of algorithm
中值滤波[7]是红外图像检测过程中常用的空域滤波方法,滤波器结构简单,容易在硬件平台上实现,尤其适用于斑点噪声和椒盐噪声。中值滤波算法是一种基于非参数统计的排序算法。该算法是利用背景区域的相似性和弱小目标局部极值特性,结合非参数统计方法构造的一种图像预处理方法,其计算公式如下

式中 f(x,y)为原始图像中位于(x,y)处像素灰度值,b(x,y)为中值滤波后图像位于坐标(x,y)处像素灰度值,在图像预处理过程中可将b(x,y)视为背景,R 为计算的局部区域,s(x,y)为得到的预处理后的输出图像。剪切波[8]与小波变换[9]相比,同时具有多分辨、局域性和方向性等优点。剪切波变换定义如下


其中,T 为阈值。剪切波能够从多尺度几何分析的角度对图像进行处理,在去除噪声、背景的同时,尽量避免目标信息的丢失。在阈值分割算法方面,为保证系统实时性,设计中采用控制计算机动态设定全局阈值,最后进行连通域分析,确定图像中是否包含光斑目标,如果有,则输出目标中心的坐标值。
3 实验结果
实验场景如图5 所示,实验平台搭建如图6 所示。

图5 实验场景Fig 5 Experimental scene

图6 实验平台框图Fig 6 Block diagram of experimental platform
发射端由两台激光器,经80 mm 口径通信镜头向对岸发射850,1 550 nm 波段的激光,接收端在平台上放置两个150 mm 口径,1 500 mm 焦距的卡式结构光学天线,分别对两个波段的光束进行接收,其中,可见光相机在850 nm 波段的量子相应效率为12%,在1 550 nm 波段的量子相应效率可视作0,短波红外相机在1550 nm 波段的量子相应效率约为40%,在850 nm 波段量子相应效率极低,两种相机在时统终端的触发下,以500 Hz 的频率进行光斑图像同步采集,经Camera Link 数据线分别传输至实时图像处理系统中。同步图像采集结果如图7 所示,其中,(a)图为可见光相机采集图像,(b)图为红外相机采集图像,时间信息叠加在图像的第一行上(图像第一行未经实时处理)。
实时输出的光斑中心形心位置与事后通过Matlab 对原图质心进行的比较结果如表1 所示,其中,当未发现激光光斑时,给出的目标坐标值为(0,0)。
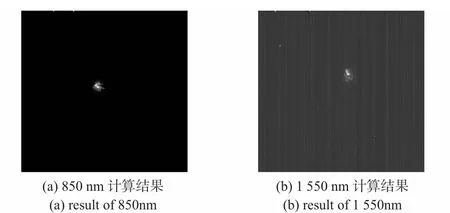
图7 同步采集图像Fig 7 Synchronously acquired image

表1 形心计算结果与原图质心比较Tab 1 Comparison of centroid and gravity
通过5 000 帧图像实时形心计算结果与事后质心计算结果进行比较,将事后质心结果看作真值,则形心计算误差平均值为:x 方向0.21 像素,y 方向0.15 像素。通过解算叠加在图像第一行的时间信息,能够定位同一时间段内的可见光图像和红外图像,并根据光斑中心的到达角起伏方差和闪烁指数,计算并比较该时间段内的大气折射率结构常数。为了便于事后对图像的查看与处理,系统不但能实时工作,并且能实现对图像的实时存储。在进行同步存储时,实时采集与处理系统以DMA 方式按PCI—e 协议向服务器传输数据,根据相机分辨率和帧频,其传输数据流为20 MB/s,测试计算机的磁盘读写速度在稳定后均大于100 MB/s,理论上完全支持相机采集图像的数据流实时存储,但在实际实验中,数据写入磁盘会产生间歇性的写入错误。使用乒乓缓存写入数据解决上述问题时,会产生串帧和丢帧,即使改变乒乓策略,修改线程优先级,也无法消除丢帧串帧的现象。丢帧和串帧的产生是因为电脑运行的是非实时操作系统Window 7 64 bit,因此,CPU 不能按理论性能实时完成读写操作。开辟内存,以链表形式进行数据读写,暂时不能完成存储的数据缓存在内存中,由于计算机内存相对较大(64 GB),实际外场中单次记录时间约30 min,30 min 时间所积累在内存中的数据小于50 MB,因此,采用链表形式能够有效地避免丢帧和串帧现象的发生。图8 所示即是随着记录时间不断延长,内存开辟空间发生的变化。
4 结 论
为更好地定量评价大气湍流对近海激光通信的影响,需采用双波段激光验证不同大气折射率结构常数估算模型方法,并在船用激光通信系统的实际应用环境中进行实验。本文根据实验需求设计了基于可见光CMOS 传感器和短波红外传感器的图像采集与处理系统,系统能够在500 Hz 的工作频率下同步采集850 nm 和1 550 nm 激光光斑图像,并对图像进行处理与存储,满足双波段大气折射率结构常数测量实验的要求,为近海激光通信关键技术研究提供了技术支持。

图8 链表缓存数据前后内存占用比较Fig 8 Memory usage before and after linked list cached data
[1] 郭帮辉,王 健,黄剑波,等.三波段光学成像系统设计及鬼像分析[J].光子学报,2014(1):104-108.
[2] 黄漫国,樊尚春,郑德智,等.多传感器数据融合技术研究进展[J].传感器与微系统,2010,29(3):5-8,12
[3] 田 娟,郑郁正.模板匹配技术在图像识别中的应用[J].传感器与微系统,2008,27(1):112-114,117.
[4] Larry C Andrews,Ronald L Phillips.Laser beam prorogation through random media[M].Bellingham,Washington:SPIE Optical Engineering Press,1998:210.
[5] Babcock H W.The possibility of compensating astronomical seeing[M].San Francisco:Publication of the Astronomical Society of the Pacific,1953:229-236.
[6] Carasso A S.Direct blind deconvolution[J].Appl Math,2001,61(6):1980-2007.
[7] 赵高长,张 磊,武风波.改进的中值滤波算法在图像去噪中的应用[J].应用光学,2011(4):678-682.
[8] 郑 红,郑 晨,闫秀生,等.基于剪切波变换的可见光与红外图像融合算法[J].仪器仪表学报,2012(7):1613-1619.
[9] 郭彤颖,吴成东,曲道奎.小波变换理论应用进展[J].信息与控制,2004(1):67-71.
猜你喜欢
ELLE世界时装之苑(2024年5期)2024-05-14 09:45:39
都市(2023年6期)2023-12-28 07:56:54
诗歌月刊(2023年1期)2023-03-22 14:06:24
环球时报(2022-05-23)2022-05-23 11:28:37
金桥(2021年4期)2021-05-21 08:19:20
阅读(高年级)(2019年9期)2019-11-15 07:22:54
阅读与作文(小学高年级版)(2019年8期)2019-10-16 04:46:50
电子制作(2019年7期)2019-04-25 13:17:14
光学精密工程(2016年3期)2016-11-07 09:03:43
高师理科学刊(2016年8期)2016-06-15 20:27:45