
MS50全站扫描仪性能研究
2015-03-30 03:37:54朱晓康邹进贵
测绘通报 2015年1期
朱晓康,邹进贵
(武汉大学测绘学院,湖北 武汉430079)
一、引 言
2014年6月,瑞士徕卡公司推出的MS50全站扫描仪在中国大陆发布。MS50全站扫描仪是一款技术先进、功能全面的新型测绘仪器,它集智能全站仪技术、超站仪测量技术、数字图像测量技术以及3D点云扫描测量技术等于一身,快速高效地获取高精度的测量成果。由于MS50具有精度高、功能全、操作简单等优点,一经推出,便受到各行各业的青睐。
MS50的测量数据同样会受到各种误差的影响,而且这些误差来源众多,影响程度各不相同。只有对MS50的各项性能进行充分测试,建立误差模型并进行分析,尽可能消除或削弱各项误差的影响,才能系统地对MS50的性能指标作出评价,获得高质量的测量成果。
二、MS50测量新技术
1.WFD测距技术
MS50测距采用全新的波形数字化技术,即WFD测距技术。WFD测距技术是一种特殊的脉冲法测距,综合了脉冲法测距与相位法测距的优点,具有速度快、光斑小、精度高、范围大的特点,配合GPH1P棱镜的测程可以达到10 000 m,单次测距精度为±(1 mm+1.5×10-6D),免棱镜的测程最远可以达到2000 m,单次测距精度为±(2 mm+2×10-6D)。
2.点云扫描测量技术
点云扫描是MS50的最显著功能。与传统扫描仪的面扫描不同,MS50利用快速旋转的垂直轴实现线扫描,然后利用水平驱动进行旋转,因此扫描速度主要取决于目标的宽度和横向分辨率。MS50提供4种扫描模式(见表1),最远测程可达1000 m,在300 m内的扫描速度高达1000点/s,低于传统三维激光扫描仪,但在扫描距离、点位密度和扫描精度等方面比传统扫描仪有大幅提高,因此,MS50可以高效获取高密度、高精度的三维点云数据。
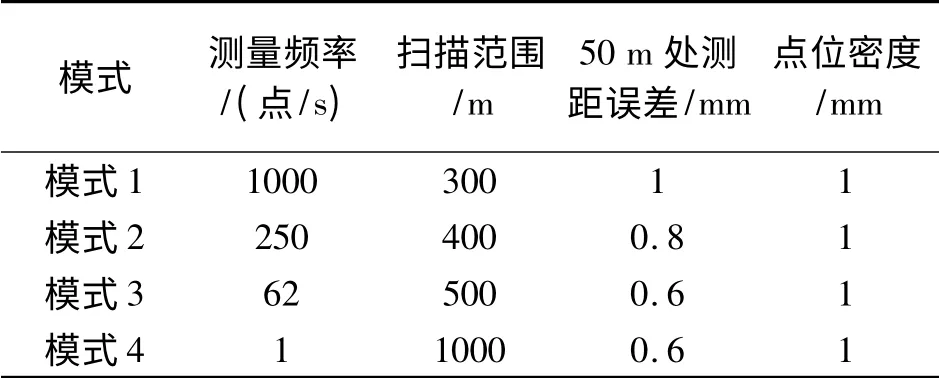
表1 MS50全站扫描仪扫描测量参数表
MS50是基于全站仪设站定向的方法进行扫描的,点云数据已经统一到同一独立坐标系,因此MS50既可以和传统三维激光扫描仪一样基于公共点最小二乘转换模型实现点云拼接,也可以采用先控制测量后设站定向的方法进行拼接。
3.ATR自动照准技术
MS50的自动照准功能采用先进的ATR技术,由照准红外发光管自主发射一红外光束,然后被同轴投影在望远镜上,从物镜发射出去后,经目标棱镜反射并由内置CCD相机接收,然后通过图像识别与处理实现目标棱镜的快速精确照准。MS50的ATR模式测程可达1 km,1 km时测距精度是±1 mm,测角精度为1″。在工程测量中,ATR配合MS50的EGL导向光装置和锁定跟踪装置可以快速定位目标,在施工放样时尤为方便。
4.图像测量技术
MS50通过500万像素广角相机和望远镜相机,可以实时高效获取观测目标的高清影像。广角相机的对角视场为19.4°,可用于粗略照准、定义规划扫描区域及拍摄全景图,而望远镜相机的视场仅为1.5°,可实现快速精确照准。在高度角超过35°时,对于传统全站仪,测量员很难准确地选取目标,只能通过弯管目镜来选取目标,但MS50的相机功能可以把目镜的视场同步显示在显示屏上,并可以放大缩小,以供测量员快速准确选取目标。
三、测角测距精度测试
1.一测回水平方向标准差的测试
一测回水平方向标准差是指全站仪用盘左和盘右观测同一目标所求得的水平方向值的准确度,是衡量全站仪测角质量高低的重要标志。MS50水平角的标称精度为0.5″,本文通过多测回多目标法对其进行检测,同时给出由观测值计算一测回水平方向标准差的计算模型,最终用测试所得的标准差与标称精度进行比较判断仪器是否达到标称值。
(1)方案实施
本试验包括自动照准和人工照准两种模式,每种模式观测4个序列,每个序列在不同的观测条件下进行,但观测条件能够保证正常的观测进行。在一个序列中,设立5个观测目标(见图1),盘左、盘右观测3个测回,每个目标距离测站大约100 m,要求目标与仪器近似水平,且每两个相邻目标与仪器所成的夹角近似相等。
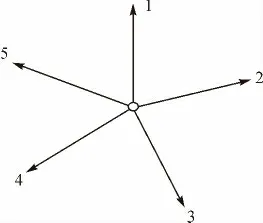
图1 观测目标分布示意图
1)自动照准模式按照试验要求设立测站和目标,并把MS50和PDA通过蓝牙连接,利用“多测回测角”软件的学习测量通过方向观测法对目标1、2、3、4、5按顺时针方向依次观测,最后回到起始方向A进行归零。然后在PDA上设置3个测回,仪器便跟随学习测量的模式自动观测目标并记录数据。观测结束后,软件会对观测数据进行计算,并检核各个限差是否超限。按照同样的方式,在不同的观测条件下对目标进行另外3个序列的观测。
2)人工照准模式设立测站和目标后,通过方向观测法对目标1、2、3、4、5、1观测3个测回并记录数据,每次观测时保证十字丝切准棱镜中心。
(2)计算模型
本文设计了一种适用于多测回多目标法的一测回水平方向标准差计算模型:
用m(m=1,2,3,4)来表示检定序列数,用i(i=1,2,3,4,5)来表示观测目标,用j(j=1,2,3)来表示测回数,那么每个目标的方向值可用rij来表示。
对同一检定序列,各目标相对目标1归零后,得到第i个目标各测回的方向平均值为

则同一目标各测回归零后的观测值与该目标3个测回的方向平均值之差为

则同一测回各方向的偏差平均值为

因此,各测回各方向的残差为

第m个检定序列的残差平方和为

每一个检定序列多余观测值为

则一序列一测回水平方向标准差为

因此,一测回水平方向标准差由4个序列取几何中数,即
(3)结果分析
对于两种照准模式的观测数据,以其中一个序列为例,利用上述计算模型对观测数据进行处理和分析,结果见表2。
根据上述计算模型计算得该序列一测回水平方向标准差

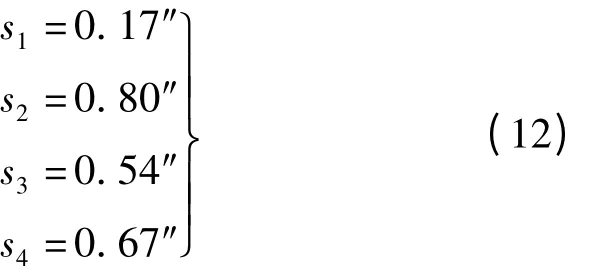
同理可得人工照准第2序列、第3序列、第4序列的标准差依次为
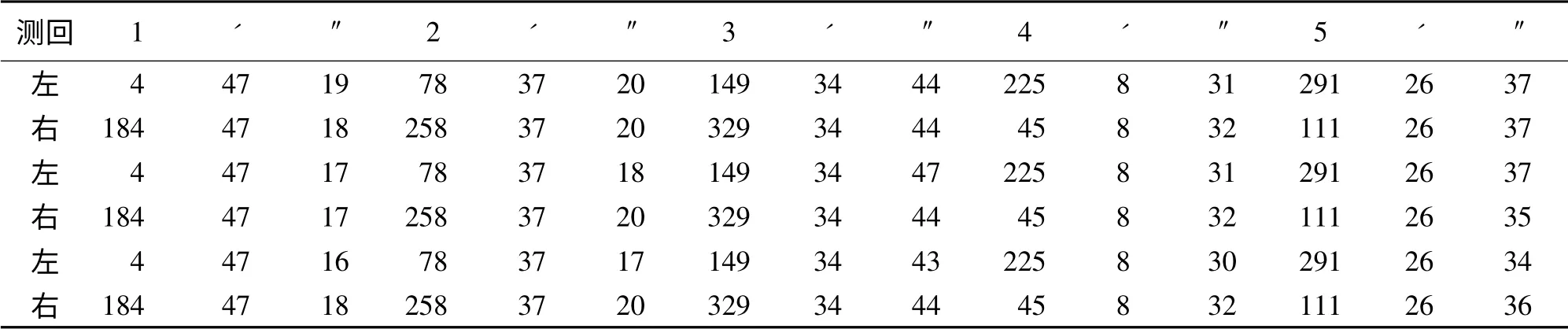
表2 人工照准第一序列观测数据表
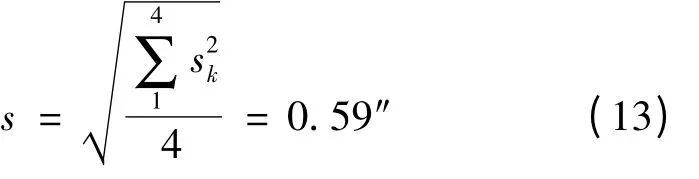
由此可以得到人工照准时一测回水平方向标准差为

同理计算自动照准时各序列标准差依次为
由此可以得到自动照准时一测回水平方向标准差为
通过以上计算结果可以得知:
1)无论是自动照准还是人工照准,测试得出的MS50全站扫描仪一测回水平方向标准差都在1″的标称精度之内,符合仪器厂家的标称值。
2)对比自动照准和人工照准的每一序列的数据以及4个序列综合的数据,发现两种模式精度差别不大,由此可见,MS50的ATR自动照准功能相当可靠。
2.测距加常数测试
(1)六段法测试基本原理
六段解析法是一种不需要预先知道测线的精确长度而采用电磁波测距仪本身的测量成果通过平差计算求定加常数的方法。基本做法是设置一条直线,将其分为d1,d2,…,dn等n个线段,如图2所示。

图2 六段解析法示意图
由于

可得
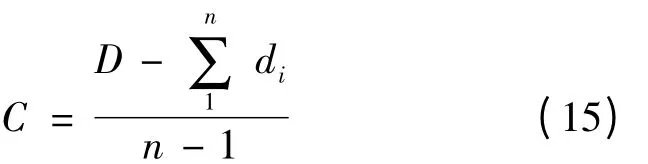
对式(15)进行微分,换成中误差表达式,得

从式(16)可以看出,段数n的设定由测定C的精度要求来决定。通常要求加常数C的中误差mc不大于该仪器测距中误差md的1/2,取mc=0.5 md,代入解得n=6.5。因此分为6~7段,一般选6段。这就是六段法的基本原理。
(2)基线解算模型
采用六段解析法,用MS50全站扫描仪对21段距离进行全组合测量,获得21个观测值。由于观测值已经进行过气象改正,且乘常数按比例隐含在每段观测距离中对加常数没有影响,因此只需对21个观测值进行最小二乘平差解算求得六段距离真值以及仪器加常数。
设D01~D56为21段距离观测值,D'01~D'56为基线实际值,v01~v06为距离改正数,取0号点到其他6点的实际值为X1、X2、X3、X4、X5、X6,以及加常数K作为待估参数,则建立观测方程为
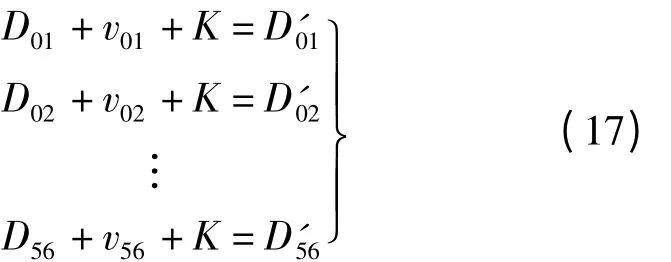
误差方程为
列立并解算法方程式,求得X1、X2、X3、X4、X5、X6、K的值和MS50距离测量单位权中误差。
(3)观测数据及结果分析
由于MS50全站扫描仪仪器内部植入了气象改正程序,所以只需在观测之前输入所在观测环境的气象因子,即可直接读取21段气象改正后的距离。观测数据见表3。
把观测数据代入基线解算模型,解得
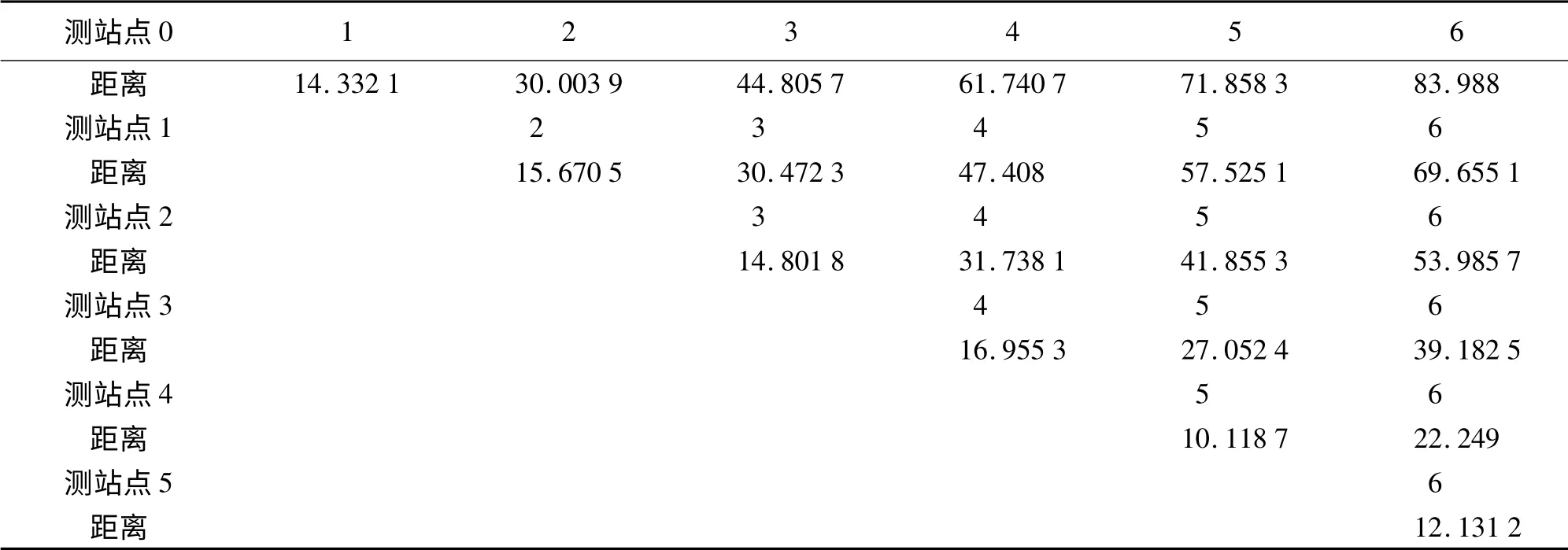
表3 六段法距离观测数据表

进一步计算可得,MS50全站扫描仪距离测量单位权中误差为

加常数测定中误差为

由此可知,MS50全站扫描仪的仪器加常数为-0.4 mm,测距中误差为±0.6 mm,小于仪器的标称测距精度。
四、扫描性能测试
利用MS50全站扫描仪在测站点对8个相同目标进行扫描,然后将扫描坐标与基准坐标进行对比分析,通过最小二乘平差解算出点位平均偏差,以此来评价扫描精度。将3个测站点的扫描坐标进行互相比较,通过最小二乘平差解算出点位平均偏差,以此来评价拼接效果。
1.方案实施
为了减小中误差对点位精度的影响,本试验在武汉大学测绘学院顶楼选择4个强制对中墩(TPS1、TPS2、TPS3、TPS4)作为控制点,在教学实验大楼和测绘学院顶楼无规律地布设8个平面标靶(1、2、3、4、5、6、7、8)作为目标点。
1)在控制点TPS1—TPS4上依次架设仪器,在其余3个控制点上架设棱镜,利用方向观测法对目标棱镜依次进行两个测回的观测。然后利用GNPS软件对观测数据进行平差,得到每个控制点平差后的坐标值,如表4所示。

表4 平差前、后控制点坐标
2)在控制点TPS1—TPS4上依次架设仪器,分别对平面标靶进行免棱镜观测,盘左、盘右两个测回,然后利用GNPS软件进行平差,作为平面标靶中心的基准坐标值,如表5所示。
3)在控制点TPS1—TPS4上依次架设仪器,分别对平面标靶(1、2、3、4、5、6、7、8)进行扫描,然后利用Cyclone软件中的平均值法对平面标靶进行拟合,提取标靶中心坐标。以TPS1为例,拟合中心坐标如表6所示。
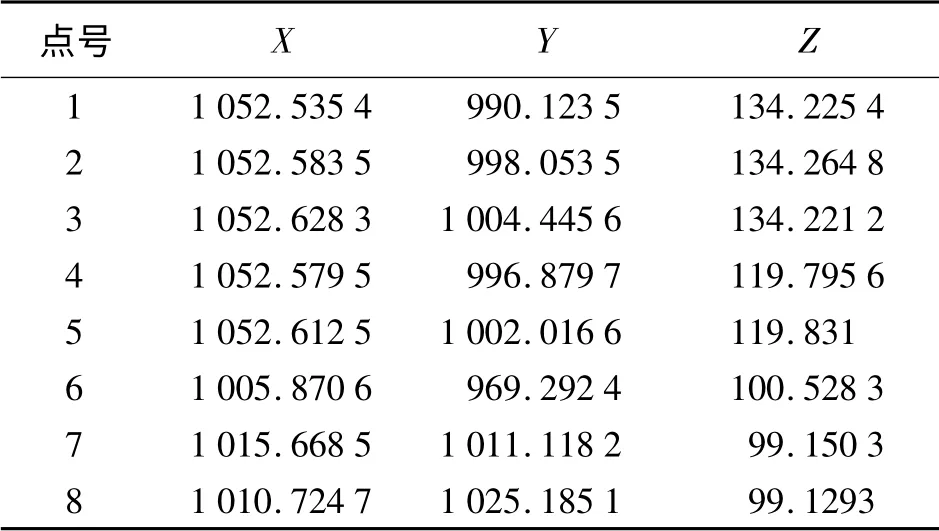
表5 MS50免棱镜模式基准坐标
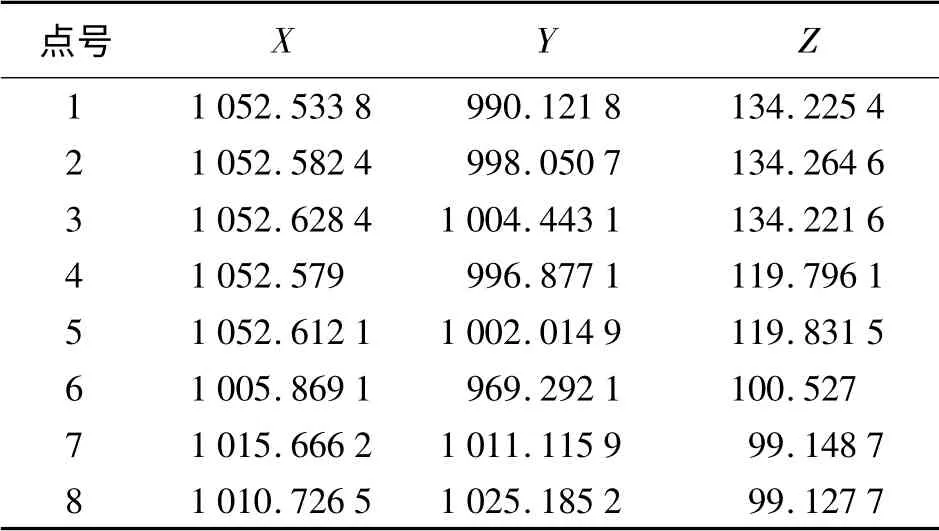
表6 MS50扫描模式拟合中心坐标(TPS1)
2.数据分析
1)将TPS1的扫描坐标与基准坐标进行对比分析,点位偏差如表7所示。
由于MS50是基于测站点建立的扫描,扫描坐标和基准坐标属于同一个坐标系,因此无须进行坐标转换,8个目标点全部参与检核,计算得MS50全站扫描仪点位平均偏差为
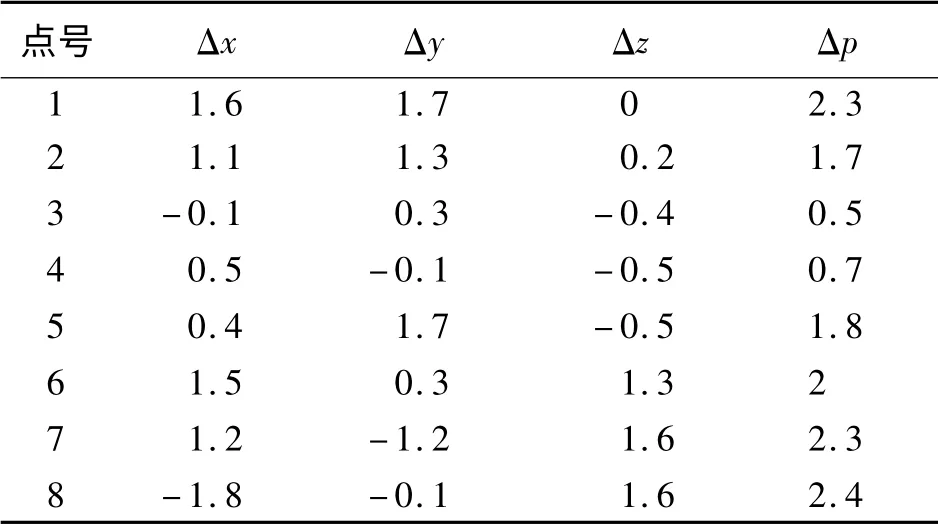
表7 扫描坐标与基准坐标点位偏差汇总表 mm

由以上结果可知,与基准坐标进行比较时,MS50全站扫描仪的点位平均偏差为1 mm,符合仪器标称扫描精度。
2)MS50是基于全站仪设站定向的方法进行扫描的,不同测站点的点云数据已经统一到同一独立坐标系,无须进行拼接配准,因此可以用MS50在测站点TPS1扫描的标靶中心坐标与TPS3、TPS4扫描的标靶中心坐标的点位平均偏差衡量拼接精度。各分量的点位偏差汇总如表8所示。
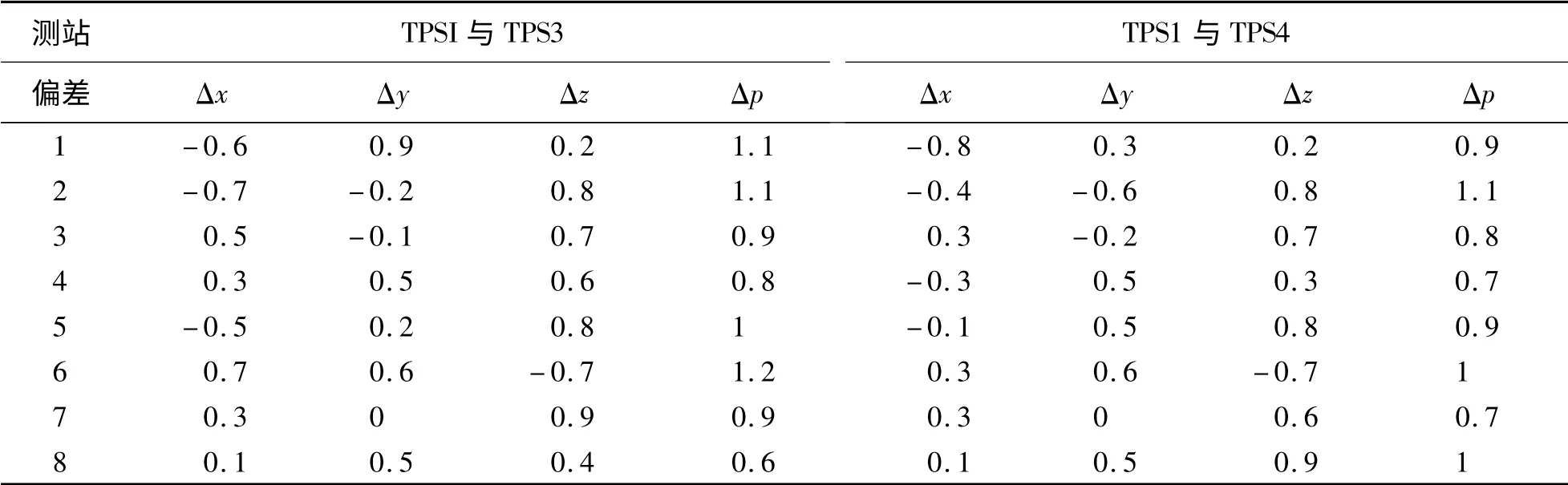
表8 TPS1扫描坐标与TPS3、TPS4扫描坐标点位偏差汇总表 mm
根据上述偏差进行计算得测站3与测站1相比,目标点的点位平均偏差为

同理计算得测站4与测站1相比,目标点的点位平均偏差为

由以上结果可知,MS50全站扫描仪基于设站定向的拼接结果相当理想。
五、结 论
本文通过对MS50全站扫描仪的各项性能进行测试与分析,系统地评价了MS50的性能指标,主要结论如下:
1)介绍了MS50全站扫描仪所应用的新技术,包括WFD测距技术、点云扫描测量技术、ATR自动照准技术等。
2)通过多测回多目标法对MS50的一测回水平方向标准差进行了检定,结果表明测角精度符合标称值。通过六段法对MS50的测距加常数和测距中误差进行了检定,结果表明测距加常数和测距中误差均符合标称值。
3)利用MS50在3个测站点对8个相同目标分别进行扫描,并将扫描坐标与基准坐标进行对比分析,结果表明MS50的扫描精度符合标称值。将不同测站点的扫描坐标进行比较,结果表明MS50的基于设站定向的拼接能够达到很高的精度。
[1] 赵煦.基于地面激光扫描点云数据的三维重建方法研究[D].武汉:武汉大学,2010.
[2] 花向红,邹进贵.《数字测图原理与应用》精品课程建设的实践与思考[J].测绘工程,2008,17(3):74-76.
[3] 李东敏,范百兴,周蕴,等.全站式扫描仪测量原理及精度分析[J].测绘通报,2014(8):32-35.
[4] 徐进军,张毅,王海成.基于地面三维激光扫描技术的路面测量与数据处理[J].测绘通报,2011(11):34-36.
[5] 梅文胜,郑勇波,周命端.基于PDA的测量机器人自动化网观测软件研究[J].测绘信息与工程,2008,33(5):45-47.
[6] 虞积强.全站仪误差与检验研究[D].合肥:合肥工业大学,2008.
[7] 付子傲,宋以胜,包欢,等.全站仪测距常数检定新方法[J].测绘科学技术学报,2009,26(3):174-176.
[8] 张启福.地面三维激光扫描仪性能测试方法研究[D].郑州:信息工程大学,2012.
[9] ZHANG Q,SUN X,WANG L.Research of Methods to Test Accuracy of RIEGL VZ-400 Laser Scanner Based on Simple Six-range Analytical Method[J].Geotechnical Investigation&Surveying,2011,39(3):63-66.
[10] LIU JH.Test and Analysis of Measurement Accuracy of Terrestrial 3D Laser Scanner[J].Geomatics&Spatial Information Technology,2013(5):52-56.
猜你喜欢
小学生作文·小学低年级适用(2025年2期)2025-03-05 00:00:00
照明工程学报(2023年4期)2023-12-09 07:07:12
青海农技推广(2022年4期)2022-02-15 00:57:24
销售与市场(营销版)(2021年4期)2021-04-16 03:27:04
时代汽车(2019年4期)2019-06-11 03:41:29
军事体育学报(2017年2期)2017-12-31 13:45:24
现代营销·经营版(2015年3期)2015-04-20 06:46:58
电测与仪表(2014年14期)2014-04-04 11:53:20
现代营销·经营版(2013年5期)2013-05-14 14:55:04
警察技术(2013年1期)2013-03-20 14:11:22
