
虚拟地理环境中空天环境仿真技术研究
2015-03-28 06:11张宗佩
测绘工程 2015年2期
张宗佩,万 刚,刘 静
(信息工程大学,河南 郑州450052)
1957年第一颗人造卫星发射成功,标志着人类进入了空间时代。人类的活动范围已经由地球表面延伸到近地空间、外层空间、行星际空间等空间环境,空间已成为未来人类航天活动和科学探索的重要场所。尽管目前已有一些功能强大的航天仿真软件,尤其是被广泛应用于航天领域的卫星系统分析软件卫星工具包(Satellite Tool Kit,STK)。其能够为卫星设计、制造、发射、运行和应用提供强大的分析仿真能力,帮助使用者快速准确地了解飞行任务。但其价格十分昂贵,仿真空间多以人造卫星活动空间为主,缺乏对行星际空间的仿真,与虚拟地理环境结合不足。
目前,虚拟地理环境研究领域主要集中于地球表面以及地下地上数千米范围内,未考虑地球公转自转因素,对太阳系空间环境中包含的信息描述不足。因此,结合目前虚拟地理环境研究成果和空天环境仿真需求,提出一种充分利用虚拟地理环境仿真成果的空天环境仿真方案。将虚拟地理环境仿真中地球的仿真技术应用于太阳系中其他行星仿真;给出空天环境仿真的流程,研究空天环境仿真的建模基础和关键技术,实现对空天环境中主要要素及其变化运行规律仿真,提高观察者对空天环境的认知能力,为利用空天环境开展空间活动提供技术支持。
1 空天环境仿真流程和基础
1.1 空天环境仿真流程
空天环境仿真流程如图1所示,首先建立空天环境仿真的基础条件,包括空间基准和坐标变换、时间基准和时间变换,以及历表/解析法求解位置速度方法。在建立的空天环境仿真基础上,计算恒星、彗星和行星/卫星在太阳质心黄道坐标系中任意时刻具体位置、速度和姿态信息,结合虚拟地理环境仿真技术,拓展虚拟地理环境仿真空间范围,实现对空天环境的仿真。

图1 空天环境仿真流程
1.2 空天环境仿真时间基准
空天环境是时刻变化的环境,为了实现对空天环境仿真,必须选定时间基准。空天环境仿真中常用的时间系统有恒星时系统、太阳时系统和原子时系统。
1)恒星时系统。以春分点的周日视运动周期所确定的时间计量系统,称为恒星时系统[1]。恒星时常用S表示。春分点连续两次通过测站的子午圈所经历的时间段,称为一个恒星日。根据春分点的运动情况,可以把它分为平春分点和真春分点。真春分点是指随岁差和章动变化的春分点,相对于真春分点的恒星时称为真恒星时;平春分点只受岁差的影响,对应的恒星时称为平恒星时。
2)太阳时系统。太阳时系统是以太阳的周日视运动周期为基准的时间计量系统,包括真太阳时和平太阳时。格林尼治平太阳时称为世界时,用UT表示。
3)原子时系统。国际原子时(TAI)是由国际计量局(BIPM)根据国际单位制时间单位秒的定义,以各研究所运转的原子钟读数为根据,在海平面上建立时间参考坐标。
以J2000.0纪元为虚拟地理环境中空间环境仿真的时间起点,行星/卫星等天体和自然现象的变化仿真都以J2000.0纪元为基准。通常J2000.0纪元指的是TAI时2000年1月1日11:59:27.816或协调世界时2000年1月1日11:58:55.816。
1.3 空天环境仿真空间基准
为了仿真空天环境中各种要素,必须建立准确的空间基准,即天球坐标系。常用天球坐标系包括地平坐标系、赤道坐标系和黄道坐标系。
研究空天环境中各天体的运动情况时,需要使用日心黄道坐标系。日心黄道坐标系是描述太阳系各个行星、小行星的坐标系基础,其坐标原点位于太阳质心。
地球绕太阳公转的轨道平面称为黄道面,黄道面与天球相交的大圆称为黄道。黄道坐标系选取黄道为基本圈,Z轴指向北黄极,X轴指向春分点,为右手坐标系。黄道坐标系的纬角称为黄纬,常用β表示;经角为黄经,常用λ表示,如图2所示。过北黄极和春分点的大圆是黄道坐标系的零经圈。

图2 黄道坐标系[1]
1.4 星历表计算行星位置
JPL行星/月球星历是目前关于太阳系、行星和月球的通用星历,该历表以切比雪夫多项式的形式给出太阳、大行星和月球的位置速度,以及地球章动和月球天平动的数据。
在给定的时刻,每个天体的位置和速度都以切比雪夫多项式的系数序列给出。其通常都有相同的形式,以x坐标分量的插值位置矢量为例,在t时刻它的位置可由式(1)给出。

式中:Tk(t)是第一类切比雪夫多项式;ak是存在星历文件中的系数;方程中的时间t是一个标准化的时刻,即-1<t<1,其值可以通过式(2)根据儒略日计算得到

式中:T为当前的儒略日数;T0为存在系数节点开始处的儒略日数;ΔT为系数记录的时间跨度。
根据切比雪夫多项式可推导出

由上述递推式可以计算得到任意时刻t的x分量,同理对于其他分量也采用同样方法。
2 空间环境仿真的关键技术
2.1 星空背景仿真
在空天环境中建立准确的三维星空模型,是进行逼真空天环境仿真的基础。星空背景主要由远离太阳系的各类恒星、彗星等天体组成。因此,星空背景仿真主要是在太阳系天球背景上绘制恒星和彗星。
根据星的亮度等级,采用点状与Bill boar d组合方式仿真[4]。恒星亮度等级可以通过依巴谷星表快速获取,目前恒星亮度等级多分为6个等级,肉眼能够刚刚看到的恒星亮度为6等,最亮的一些恒星星等为1等,1等星亮度是6等星亮度的100倍。观测恒星亮度由于衍射现象,通常看到的恒星都是中间亮、周围略微暗淡的模糊点,因此文中采用以下纹理对应6个等级的恒星,如图3所示。为了管理依巴谷星表中恒星数据,建立恒星数据结构如下:
typedef str uct Star Str uct{
fl oat Star Level;//星等
vec3f Star Position;//位置
GLuint*Star Text ure;//纹理
GLfloat ambient[4];//环境光
GLfloat diff use[4];//散射光
GLfloat specular[4];//反射光
GLfloat shiness;//自发光强度
}

图3 6个星等对应的纹理
在恒星数据结构内完全记录恒星背景仿真需要的所有原始数据,通过读取依巴谷星表填充星等、位置信息,并根据星等不同选定纹理、确定光照参数。
1)亮度等级低于5等。由于低亮度等级恒星数量多,都采用面纹理绘制将消耗大量纹理资源,影响仿真系统运行效率,并且人眼观察低亮度等级恒星多为一个模糊点。因此,对于亮度等级低于5等(包含5等)的恒星采用绘制颜色略显暗淡点来表示,自发光强度设置为0.1即可。
2)亮度等级高于4等。对于亮度高于4等(包括4等)的恒星,采用衍射纹理映射结合Bill boar d表示。根据星表获取的星等决定使用那个亮度纹理,采用Bill boar d技术将纹理映射到恒星位置处一个正方形面板上,并添加自发光光照效果,增加真实性。
依据星等把恒星划分为点状和Bill boar d两类并分别使用不同的表示方法,合理并符合人眼观察星空的观察习惯,便于观察者形成空天环境背景的认知感,如图4(a)所示。
2.2 行星仿真
太阳系主要组成部分为8大行星,行星的仿真效果对于整个空天环境仿真效果起决定性作用。行星仿真主要包括行星表面仿真、行星自转公转仿真、行星其他特效仿真(如晨昏线、大气圈光晕、土星光环等)。
2.2.1 行星表面仿真
行星表面仿真采用混合式全球网格划分方法[2]对行星椭球体进行剖分,并对表面纹理、特征等数据按照此方法进行管理、显示。对不同行星进行混合式全球网格划分时,需要明确行星采用的坐标系统定义,才能实现混合式网格剖分,进而管理表面纹理数据、高程数据等信息。
混合式全球网格划分方法是在45°纬度以上区域采用基于极地等距离方位投影的极地正方形变换来进行网格划分,在45°纬度以下区域采用基于等距离正圆柱投影的网格划分方案。
2.2.2 行星自转公转仿真
行星自转公转仿真主要是对行星位置信息、姿态信息的表达,而行星位置和姿态信息通过建立的时空基准变换关系和JPL历表获取。采用更新回调机制,在每次重绘仿真场景之前,更新场景中行星位置和姿态信息,从而实现对行星自转公转仿真。以地球、月球仿真为例论述其流程。
1)确定地球、月球在仿真初始时刻J2000的姿态信息,包括自转轴朝向、本初子午线朝向等信息。
2)根据JPL历表计算当然时刻t地球、月球在日心黄道坐标系中坐标位置以及地球、月球的相对于初始姿态的变化信息,反映到数学层面就是一个平移向量和一个旋转矩阵M。
3)在以日心黄道系为基准的仿真框架内,实时更新地球、月球的位置信息以及姿态变化信息,实现地球、月球的公转位置变化和自转姿态变化。
同理,可以对太阳系内其他行星、卫星进行自转、公转运动仿真,仿真效果如图4(b)所示。
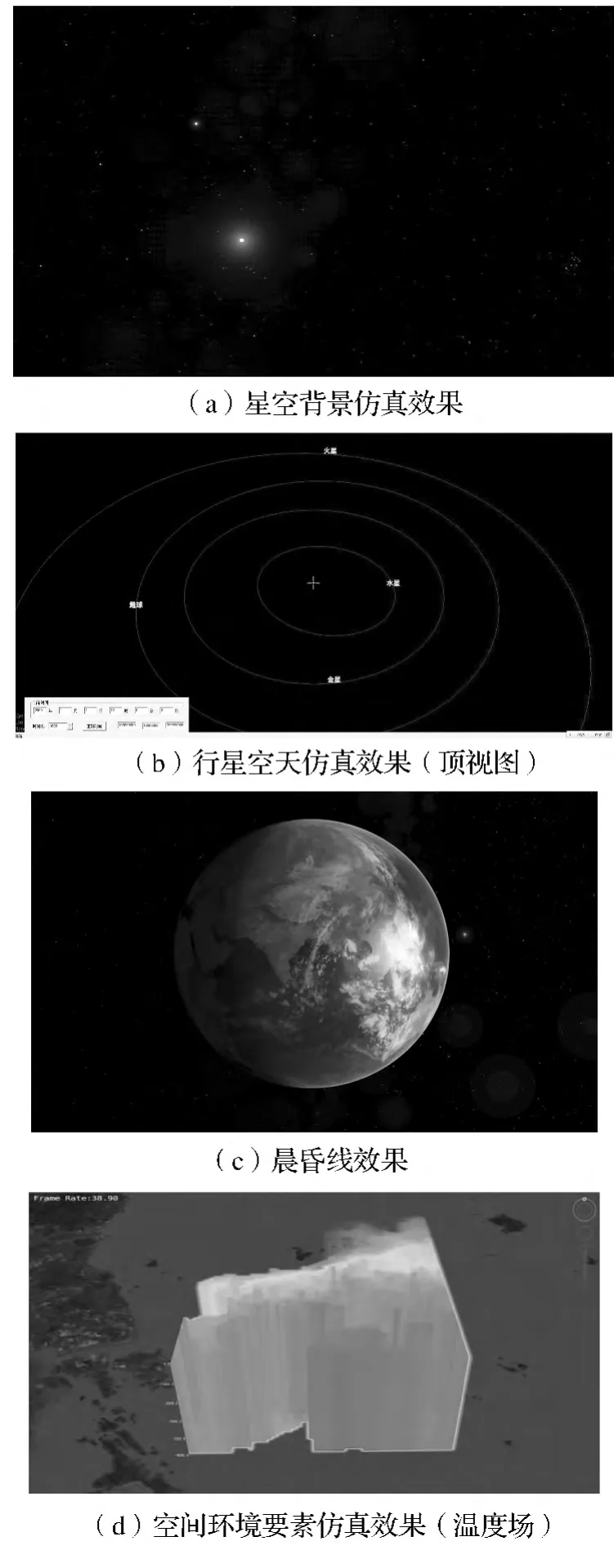
图4 空间环境仿真效果
2.2.3 行星其他特效仿真
行星其他特效仿真对于空天环境仿真效果非常重要。采用着色语言,操纵图形渲染过程,实现对行星某些特效仿真,文中主要论述晨昏线特效仿真。
太阳光照是太阳系内行星、卫星晨昏线形成的主要原因。因此,仿真中可以在日心黄道坐标系原点即太阳质心位置,设置一个虚拟全局光照LightS,行星卫星围绕LightS旋转,如图5所示,由于行星距离太阳远远大于行星自身直径,可将太阳光近似为平行光。通过Open GL提供的光源参数,设定全局光照LightS光源位置为原点,光源为方向行光源即平行光,并设置光照的环境光、散射光、反射光参数。此外,为每个行星、卫星维护一个材质参数结构体,包括环境光、散射光、反射光和自发光4个参数。自发光参数主要解决行星阴面过于漆黑难辨的问题。通过Open GL,采用Gouraud光照处理方法,实现晨昏线显示效果,如图4(c)所示。

图5 全局光照示意图
2.3 空间环境要素仿真
空间环境要素主要包括地表以上的各类现象(云雾气体、电离层)和场(地磁场)、太阳风暴、星际间磁场等。其主要是由计算、测量或实验而得到的近地空间环境要素的数据集构成3D及高维数据场。这些数据场中包含庞大复杂的信息,不易被理解与分析。本文采用光线投射体绘制技术[3,7],对近地温度场要素数据进行可视化仿真。其具体过程如下:
1)利用Open GL着色语言的顶点着色器计算顶点,即体素的位置、相机的位置和视线方向;片元着色器计算当前视线方向上最大穿越距离。
2)利用片元着色器计算采样纹理坐标,并对体纹理进行采样,即光线穿越体纹理的过程。采用最大密度投射(Maxi mu m Intensity Pr ojection)作为体绘制的光照吸收模型

式中:k为尺度因子;ρ(t)为体素中记录的温度场数据(经归一化处理的数据,取值范围为[0,1]),光线穿越整个体纹理的所有体素时,要遍历体素确定最大值。该过程结束的条件是是否超过最大距离或者透明度大于1。
3)在片元着色器中完成对体纹理采样后得到视线方向最大温度场数据,建立转换函数(Transfer Function),实现颜色与场数据的对应关系,根据转换函数获取最终的颜色输出。遍历所有光线方向后即可得到最终的近地温度场要素可视化效果,如图4(d)所示。
2.4 空天环境仿真效果
本文空天环境仿真效果如图4所示,其准确地对空间恒星背景、行星进行仿真,对于空间环境要素仿真进行探索。仿真帧率达到30帧以上,基本能够满足仿真系统实时、真实需求。
3 结束语
论述空天环境仿真基础,并对空天环境仿真的关键技术进行深入研究,基本实现空间环境仿真的主要内容,仿真效果十分逼真,且实时性强,提高观察者对空间环境的认知能力,为利用空间环境规律开展空间活动提供坚实基础。
[1] 马高峰.地月参考系及其转换研究[D].郑州:信息工程大学,2005.
[2] 韩阳,万刚,曹雪峰.混合式全球网格划分方法及编码研究[J].测绘科学,2009,34(2):136-139.
[3] 唐泽圣.三维数据场可视化[M].北京:清华大学出版社,1999.
[4] 刘世光.航天器飞行场景的真实感生成[J].计算机学报,2005,68(1):68-73.
[5] 王鹏.基于HLA的空间环境要素建模与仿真技术研究[D].郑州:信息工程大学,2006.
[6] 胡蜂,孙国基.航天仿真技术的现状及展望[J].系统仿真学报,1999,10(2):83-88.
[7] 杨帆,兰岚.基于X3D的虚拟场景设计方法[J].测绘工程,2013,22(4):5-9.
[8] NAGY Z,KLEIN R.High-quality silhouette illustration f or texture-based volu me rendering[J].Journal of WSCG,2004,12(2):301-308.
[9] 吴秀芸,王海江,徐狄军,等.基于多视角侧视仿真地图的研究与应用[J].测绘与空间地理信息,2014,37(3):213-214.
猜你喜欢
军民两用技术与产品(2022年7期)2022-08-06
军民两用技术与产品(2022年3期)2022-06-05
东坡赤壁诗词(2022年2期)2022-04-15
小哥白尼(神奇星球)(2021年11期)2021-03-08
小聪仔(科普版)(2020年12期)2021-01-18
东坡赤壁诗词(2019年3期)2019-07-05
百科探秘·航空航天(2018年12期)2018-12-29
奥秘(2018年10期)2018-10-25
小哥白尼(军事科学)(2018年5期)2018-06-15
百科探秘·航空航天(2016年9期)2016-12-01
