汉阳河钢管拱桥测量方法研究
2015-03-26 18:38陈俊明
中国高新技术企业 2015年5期
关键词:测量方法

摘要:湖北宜昌市五峰土家族自治县汉阳河特大桥是采用缆索吊机吊装钢管拱合拢成拱的方法进行施工的。为使钢管拱在吊装过程中和合拢后的各项技术指标的允许偏差控制在设计和规范规定的范围内,保证测量精度满足施工要求,制定了文章介绍的测量方法,以指导施工。文章主要介绍了吊装施工测量控制的方法和过程。
关键词:汉阳河特大桥;测量方法;缆索吊机;吊装钢管;吊装施工 文献标识码:A
中图分类号:U448 文章编号:1009-2374(2015)05-0096-03 DOI:10.13535/j.cnki.11-4406/n.2015.0380
1 工程概况
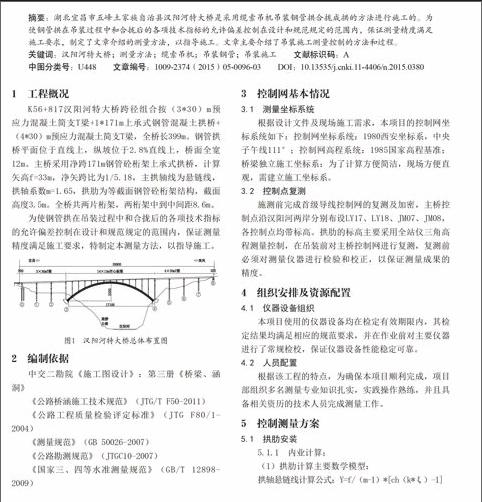
K56+817汉阳河特大桥跨径组合按(3*30)m预应力混凝土简支T梁+1*171m上承式钢管混凝土拱桥+(4*30)m预应力混凝土简支T梁,全桥长399m。钢管拱桥平面位于直线上,纵坡位于2.8%直线上,桥面全宽12m。主桥采用净跨171m钢管砼桁架上承式拱桥,计算矢高f=33m,净矢跨比为1/5.18,主拱轴线为悬链线,拱轴系数m=1.65,拱肋为等截面钢管砼桁架结构,截面高度3.5m。全桥共两片桁架,两桁架中到中间距8.6m。
为使钢管拱在吊装过程中和合拢后的各项技术指标的允许偏差控制在设计和规范规定的范围内,保证测量精度满足施工要求,特制定本测量方法,以指导施工。
图1 汉阳河特大桥总体布置图
2 编制依据
中交二勘院《施工图设计》:第三册《桥梁、涵洞》
《公路桥涵施工技术规范》(JTG/T F50-2011)
《公路工程质量检验评定标准》(JTG F80/1-2004)
《测量规范》(GB 50026-2007)
《公路勘测规范》(JTGC10-2007)
《国家三、四等水准测量规范》(GB/T 12898-2009)
3 控制网基本情况
3.1 测量坐标系统
根据设计文件及现场施工需求,本项目的控制网坐标系统如下:控制网坐标系统:1980西安坐标系,中央子午线111°;控制网高程系统:1985国家高程基准;桥梁独立施工坐标系:为了计算方便简洁,现场方便直观,需建立施工坐标系。
3.2 控制点复测
施测前完成首级导线控制网的复测及加密,主桥控制点沿汉阳河两岸分别布设LY17、LY18、JM07、JM08,各控制点均带标高。拱肋的标高主要采用全站仪三角高程测量控制,在吊装前对主桥控制网进行复测,复测前必须对测量仪器进行检验和校正,以保证测量成果的
精度。
4 组织安排及资源配置
4.1 仪器设备组织
本项目使用的仪器设备均在检定有效期限内,其检定结果均满足相应的规范要求,并在作业前对主要仪器进行了常规检校,保证仪器设备性能稳定可靠。
4.2 人员配置
根据该工程的特点,为确保本项目顺利完成,项目部组织多名测量专业知识扎实,实践操作熟练,并且具备相关资历的技术人员完成测量工作。
5 控制测量方案
5.1 拱肋安装
5.1.1 内业计算:
(1)拱肋计算主要数学模型:
拱轴悬链线计算公式:Y=f/(m-1)*[ch(k*ξ)-1]
拱轴预拱度计算公式:△F=-△f(1-4X2/L2)
拱轴任一点水平倾角:φ=argtg[2fKshKξ/L/(m-1)]
式中:
拱轴系数m=1.65
计算矢高f=33
预拱度△f=0.075
计算跨径L=171
系数k=ln(m+)
系数ξ=X/(L/2)
(2)编制Excel辅助计算程序表格(表格见后附
表1)。
表格中的相对坐标系是以没设预拱度的拱轴跨中为原点,水平指向拱脚的方向设为X正方向,竖直指向地面的方向设为Y的正方向。Excel辅助计算程序表(部分)如表1所示:
表1
x(m) ξ=X/(L/2) y=f/(m-1)*[ch(k*ξ)
-1)] Tanψ ψ(弧度) 拱腹 拱顶
0 0 0 0 0 3.500 0.000
3.25 0.038011696 0.043265042 0.026628422 0.026622131 3.543 0.043
6.5 0.076023392 0.173133909 0.05330223 0.053251836 3.673 0.171
9.75 0.114035088 0.389827947 0.080066884 0.079896444 3.890 0.383
13 0.152046784 0.693716484 0.106968003 0.1065628 4.194 0.679
16.25 0.19005848 1.085317462 0.134051436 0.133257025 4.585 1.061
19.5 0.228070175 1.565298319 0.161363344 0.159984292 5.065 1.528
22.75 0.266081871 2.134477124 0.188950276 0.186748603 5.634 2.082
26 0.304093567 2.793823975 0.216859252 0.213552584 6.294 2.723
29.25 0.342105263 3.544462649 0.245137838 0.240397301 7.044 3.453
32.5 0.380116959 4.387672521 0.273834232 0.267282083 7.888 4.272
35.75 0.418128655 5.32489074 0.302997344 0.294204378 8.825 5.182
39 0.456140351 6.357714684 0.332676879 0.321159629 9.858 6.185
42.25 0.494152047 7.487904677 0.362923422 0.348141181 10.988 7.282
45.5 0.532163743 8.717386993 0.393788524 0.375140214 12.217 8.474
48.75 0.570175439 10.04825714 0.425324792 0.402145717 13.548 9.765
52 0.608187135 11.48278342 0.457585975 0.429144488 14.983 11.155
55.25 0.64619883 13.02341082 0.490627058 0.456121179 16.523 12.648
58.5 0.684210526 14.67276515 0.524504357 0.483058373 18.173 14.245
61.75 0.722222222 16.43365753 0.559275611 0.509936698 19.934 15.949
65 0.760233918 18.30908921 0.595000083 0.53673498 21.809 17.763
68.25 0.798245614 20.30225663 0.631738662 0.563430425 23.802 19.690
71.5 0.83625731 22.4165569 0.669553963 0.589998838 25.917 21.734
74.75 0.874269006 24.65559359 0.70851044 0.616414862 28.156 23.897
78 0.912280702 27.02318288 0.748674488 0.642652241 30.523 26.183
80.4 0.940350877 28.8564294 0.779149252 0.661897135 32.356 27.952
82.8 0.968421053 30.76367857 0.810348144 0.681019012 34.264 29.793
85.2 0.996491228 32.74670297 0.842300159 0.70000689 36.247 31.705
85.5 1 32.99999997 0.846348586 0.702370407 36.500 31.950
5.1.2 安装限差
(1)合拢前:对称点高差:≤20mm
各测点标高:≤+20mm
位置偏差:≤±15mm
(2)合拢松扣后:对称点高差:≤57mm,极值为允许偏差的2倍,且相反
拱圈标高:≤±57mm
拱轴线位置偏差:≤28mm
(3)预埋件位置:≤5mm
(4)观测精度:轴线横向位置:≤4mm
拱圈高程:≤±8mm
5.2 拱座预埋
拱座内钢管拱预埋节段定位安装是钢管拱肋安装前的一项重要的工作,预埋质量将直接影响后续钢管拱整体安装线型。
5.2.1 根据设计图纸,精确放出定位槽钢的位置,铰座预埋钢板安装时用水准仪测量钢板四角高程,确保钢板水平并满足设计标高的要求。
5.2.2 安装临时铰座前,先用全站仪精确放出两侧钢管中心点位,吊装时用全站仪观测垂直度,保证临时铰座的垂直度及临时铰处于拱轴线上。
5.2.3 在安装和砼施工过程中随时检查拱轴位置,固定后再次检查轴线和标高,出现偏差需重新定位,施工中严格控制预埋段的精度。
5.3 拱肋吊装
5.3.1 拱肋节段吊装过程中的定位观测,是保证主拱肋正确就位的关键,定位观测利用全站仪的三维坐标控制功能直接测出观测点的三维坐标,时间选在清晨或黄昏日落之后,温度介于10℃~20℃之间,并且测量时间最好控制在两小时之内。施工放样时应加入预拱度,拱顶为18cm,起拱点为0cm,其他位置的预拱度值按二次抛物线进行内插。
5.3.2 预先在各节段离两侧拱肋前端50cm处,上下铉管水平中心位置的管外壁及上下铉管竖直中心位置的管外壁上作观测点,观测点采用30mm*30mm*3mm钢板制作,钢板与水平方向垂直,利用钢筋支撑焊接在拱
肋上。
5.3.3 拱肋吊装前先在拱座上放出两侧拱肋中心点,点位放出后对四个点位进行闭合复测,建立独立的施工测量坐标系,复测后的中心点数据作为控制点数据,用于控制整个拱肋的中心轴线。
5.3.4 拱肋分段安装时,在相对应的控制点上架设全站仪,观测拱肋分段侧面的四个观测点,这四个观测点的数据用于控制拱肋分段的高程及轴线的定位。
5.3.5 拱肋分段安装完成后,在拱座中心点位上架设全站仪,监测拱肋分段顶面及底面的四个观测点,确保整个拱肋的中心轴线在规范以内,如发现偏位立即调整。
5.3.6 拱肋合拢前,对两端缺口的标高、坐标和合拢段长度进行连续3d的精确观测,用50m的鉴定钢尺复核两端的间距,以确定不同温度时缺口尺寸变化与基准温度15℃时各尺寸的关系。合拢段安装应选择在一天中的最低气温时进行,但不宜低于5℃。合拢段吊装时根据实测合拢段长度,对合拢段余量进行切割。
5.4 状态监测
5.4.1 在两岸已有控制点设置观测站,利用拱肋吊装时的观测点作为监测点,监测需在拱肋合拢后、松锚过程中及松锚后三个阶段分别进行。
5.4.2 为全面掌握主拱结构的变位情况,较好地控制测量误差,采用高精度的全站仪对测点的三维坐标进行监测。
5.4.3 对主拱圈的拱脚进行变形监测,以监测拱座的变位状况。
5.4.4 采集时间选择在早晨7∶00~9∶00以前,在记录表上标明日期、时间及温度,并注明施工阶段。采集的数据要和前期采集的数据比较其变化,如有突变要分析原因、补测并通报负责人。原始数据记录要保存完好,数据文件要做好备份。
5.4.5 在沉降不明显时结束状态监测,根据测量数据变化、时间绘制曲线图,形成监测成果分析资料。
5.5 精度评定
5.5.1 测量点平面位置误差预估:
X坐标计算公式为:XP=X0+S×cosZcosA
XP为测点X坐标,X0为控制点坐标,Z为竖角,A为方位角。
根据误差传播定律,测点里程X中误差为:
在实际施工过程中控制点点位误差MX0=±1mm,仪器采用徕卡TCA2003,标称精度为0.5″,1+1ppm;方位角A最不利取±90或0度;S取最远施测距离170m,竖角Z对取最不利影响值0度。
角度观测误差来源主要有:仪器误差M仪=±0.5″;照准误差(全站仪自动搜索)M照=0″;读数误差(电子读数)M读=0″,后视建站方位角误差M站=2″,则:
=±2.06″
则在最不利情况下测点X坐标中误差为:MX=±1.5mm
Y坐标计算公式为:YP=Y0+S×cosZsinA
同上计算公式在最不利情况下测点Y坐标中误差为:MY=±1.5mm
且MX、MY极大值不可能同时出现。
5.5.2 高程控制精度预估:
测量点采用三角高程测量,三角高程计算公式:H=H0+SsinZ+i-r
其中H0为控制点高程S为斜距、Z为竖角、i为仪器高、r为棱镜高
根据误差传播定律计算测点三角高程中误差:
在实际施工过程中,其中MH0为控制点高程中误差根据控制网等级为4mm;S取最远施测距离170m;仪器采用徕卡TCA2003,标称精度为0.5″,1+1ppm,则MS=1mm,MZ=6″;Mi为量取仪器高误差取1mm;Mr为棱镜高误差取1mm;ρ=206265;当竖角Z取90度求得MH0极大值:MH=±4.4mm
5.5.3 根据计算预估本项目钢管拱桥施工测量精度:
平面精度MX=MY=±1.5mm
高程精度MH=±4.4mm
6 质量安全
(1)对既有测量控制网须加以保护,严防观测点和测量标志被人为移动或损毁;必要时,对控制网进行加密补充。当发现控制网观测点或测量标志有挪动或破坏时,应及时加以复测恢复和修正完善。(2)测量施工时注意保护仪器。仪器上高空时,应由测量人员背上高空,严禁用绳索或其他方法将仪器吊上高空。雨天或强太阳光下测量时,应打伞遮盖,并作气象改正。(3)测量人员应熟悉仪器特性,熟悉操作,动作规范;严禁观测读数时骑跨脚架。(4)钢管拱桁架吊装测量系采用三维空间坐标控制,其坐标系的建立与设计图提供的坐标系不尽一致;对此,测量人员应牢记,严防发生错误。资料出具时应注意转换成与设计图相统一的测量成果。
作者简介:陈俊明(1985-),男,中铁大桥局第七工程有限公司助工。
(责任编辑:陈 倩)
猜你喜欢
燃气涡轮试验与研究(2020年2期)2020-06-20
测控技术(2018年4期)2018-11-25
电子测试(2018年6期)2018-05-09
电测与仪表(2016年16期)2016-04-12
远程教育杂志(2016年5期)2016-02-28
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
印制电路信息(2015年6期)2015-12-30
电测与仪表(2015年23期)2015-04-15
电测与仪表(2014年1期)2014-04-04
航天器工程(2014年5期)2014-03-11