
基于磁传感器的弹丸炮口测速系统设计
2015-03-26 07:59杨国欢张晓明
传感器与微系统 2015年2期
杨国欢,张晓明,2
(1.中北大学 电子测试技术重点实验室,山西 太原030051;2.中北大学 仪器科学与动态测试教育部重点实验室,山西 太原030051)
0 引 言
炮口初速是测试火炮性能和弹外制导的重要参数之一,常规测量方法有内测法和外测法[1]。外测法将测试仪器或者发射平台安装于炮管外部,具有减轻弹体重量,可减少火药用量的优点,但这些装置在测量时,不能实时测量,对外部环境依赖较大。如激光式测速法受气体烟雾作用,会造成其它光学效应,影响测量精度。而内测法能实时测量数据并作为弹外制导的参数[2~4]。然而内测法也存在不足,例如:使用光电测速法的天幕靶只能在白天使用,而光幕靶受炮口火药气体、颗粒影响,影响测量精度[5~7]。
针对常规弹药的飞行环境,本文提出基于线圈靶和磁阻传感器相结合的方法测量弹丸炮口速度,以提高常规弹药制导化的自主性和快速反应能力,为后续弹道解算提供初值。该测量系统具有体积小、操作方便、实时性好等优点。
1 测速原理
测量系统组成结构如图1 所示,两个相同匝数和相同结构的线圈内嵌于炮管制退器中,保证两组线圈的中心轴线与炮管轴线中心线共线,两组线圈相距D。将三轴磁阻传感器组成测量系统尽量安装于弹丸质心,保证弹丸在飞行过程中三轴磁阻传感器不会有晃动。
图1 测量装置结构图Fig 1 Structure of measuring device
在两组线圈通电后,由电磁感应原理可知线圈产生磁场,磁场方向为平行于制退器中心轴。弹丸发射后经过第一组通电线圈时,磁阻传感器在感知到线圈产生磁场后产生一个脉冲信号,启动计时器,通过第二组线圈时,磁阻传感器再次感知线圈产生感应磁场后,产生第二个脉冲信号,停止计时器,根据这两个脉冲信号之间的时间间隔可得到弹丸经过两组线圈的所用的时间Δt;根据公式(1)可以求得弹丸经过两个线圈时平均速度v

式中 v 为弹丸飞行出炮口的速度;D 为两组通电线圈的距离;Δt 为定时器测得的通过两组线圈的时间。由于相对弹丸在高速飞行状态下,所用的时间短,距离D 也很短,可近似认为这段距离的平均速度为弹丸炮口初度。
2 总体方案设计
如图2 所示,两组线圈串联上电,弹丸飞行通过第一组通电线圈时,磁阻传感器感知到较大磁场,产生一个较大脉冲,将此信号进行信号调理(放大、滤波)后,经A/D 采集数据,进行上下限阈值比较,若大于阈值,响应中断请求,定时器开始计时;否则,继续采集。弹丸飞行通过第二组通电线圈时,同理,磁阻传感器感知到较大磁场,产生一个较大脉冲信号进行滤波、放大后,经过A/D 转换模块转换为数字量,进行上下限阈值比较,大于阈值时,响应中断请求,定时器停止计时,通过定时器计时可得弹丸飞行经过两组线圈的时间,实时解算出弹丸炮口速度。
图2 总体方案设计图Fig 2 Overall scheme design
3 硬件设计
如图3,硬件电路包括传感器电路、信号调理电路与A/D 转换采集单元及MCU 运算模块。

图3 硬件电路模块Fig 3 Hardware circuit module
本设计中选用Honeywell 公司研制生产的HMC1043三轴AMR 磁传感器,该传感器具有体积小的特点、其封装只有3 mm×3 mm×1.4 mm,带宽为5 MHz,可以测量500 kHz以下信号,符合在弹载测量环境中的体积小、动态性能高的测量要求。
磁阻传感器的放大和滤波电路如图4 所示,AD8426 是双通道、轨到轨型输出的仪表放大器,并且体积较小,仅为4 mm×4 mm×0.85 mm。其中一个通道提供信号调理模块的抬高电压,另一通道运用外接电阻器设置放大倍数。
图4 传感器信号调理电路Fig 4 Sensor signal conditioning circuit
为了使系统具有体积小、动态性能高的特点,炮口测速系统MCU 选择使用由ST 公司生产的Cortex—M4 内核的高性能微型控制器STM32F405,该芯片内部自带集成的三个12 位的A/D 转换外设,不用外接A/D 转换器,所以,可以达到减小系统体积的目的,此外,其转换速率和分辨率等也符合测量要求。
4 软件设计
软件流程如图5 所示,程序主要包括系统初始化模块、A/D 转换采集模块、定时器模块、中断模块和解算模块。模块间通过发送命令字和返回字来控制程序的执行过程,程序初始化后开始擦除FLASH,然后进行A/D 转换采集数据,判断是否大于阈值,如是打开定时器开始计时,等第二次再次达到阈值定时器停止计时,最后进行初始速度解算和存储。
图5 程序流程图Fig 5 Program flow chart
5 实验验证
整个测量系统由产生磁场的两组通电线圈和弹丸内部磁传感器的信号采集和调理电路组成。地面实验采用100 mm空气炮,空气炮激光测速仪如图6 所示。由于实验条件限制没有空气炮炮口制退器,选用110 mm 的PVC 管代替,其口径大小和制退器一致,PVC 管两端分别绕上两组线圈,每组线圈缠绕400 匝,两组线圈相距100 mm。整个实验装置如图7 所示。

图6 空气炮激光测速仪Fig 6 Air cannons laser velocimeter
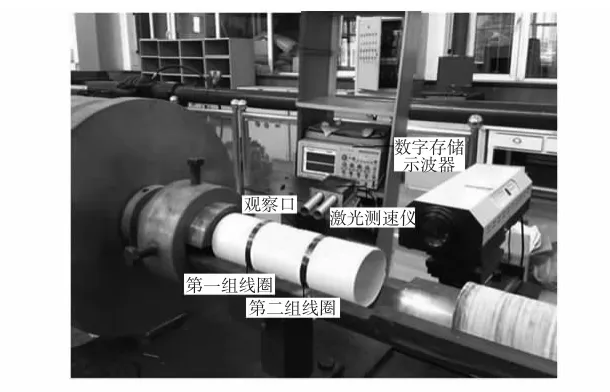
图7 实验装置Fig 7 Experimental apparatus
将线圈通电,炮弹上膛发射,采集三轴传感器输出数据和空气炮测速仪数据。图8(a)所示的激光测速仪测得的脉冲信号进行解算后得到的炮口速度为81.525 6 m/s。将图8(b)所示的数据事后进行解算为81.368 7 m/s,同时将本测量系统实时解算出的速度信息通过上位机读出为81.365 0 m/s,与事后解算值相差0.003 7 m/s,与激光测速仪测得的速度相比,相对误差相差0.197%。

图8 试验后测量系统输出Fig 8 Measurement system output after test
6 结 论
针对常规弹药的飞行环境,本文提出基于线圈靶和磁阻传感器相结合的方法测量弹丸炮口速度,通过根据炮口测速系统的测速原理,设计了炮口测速的整体方案,搭建了硬件电路和设计了相应的软件。实验表明:基于三轴磁阻传感器的炮口测速系统的误差在0.2%以内。该测量系统具有体积小、价格便宜、操作方便、实时性好等优点,对常规弹制导化改造中具有较好的应用前景。
[1] 陈 新,曹从咏,刘英舜.弹丸初速膛口激光实时测量系统研究[J].弹道学报,2002,14(1):84-86.
[2] Gautam R C Kalonia,Amod Mitra.Laser-based projectile speed measurement system[J].Optical Engineering,2007,46(4):044303.
[3] 王 斌.迫击炮弹在膛内运动姿态、速度测试方法初探[J].兵工标准化,1999(4):18-20.
[4] 杨 昭.弹载测速技术研究[D].太原:中北大学,2007.
[5] 马 玲,蔡征宇,程风雷,等.毫米波测速雷达的测速原理[J].弹道学报,2003,15(4):87-91.
[6] 马百双,刘昌锦.几种典型炮口初速测试方法比较[J].四川兵工学报,2011,32(11):53-55.
[7] Buckner,Benjamin D,LEsperance,et al.Digital synchroballistic schlieren camera for high-speed photography of bullets and rocket sleds[J].Optical Engineering,2013,52(8):83-105.
猜你喜欢
大电机技术(2022年5期)2022-11-17
广东石油化工学院学报(2022年4期)2022-09-13
指挥控制与仿真(2021年6期)2021-12-17
小学生必读(中年级版)(2021年12期)2021-12-02
防爆电机(2021年4期)2021-07-28
火炮发射与控制学报(2021年1期)2021-05-13
兵器装备工程学报(2020年3期)2020-04-22
电子制作(2018年19期)2018-11-14
兵工学报(2017年5期)2017-06-08
电测与仪表(2016年1期)2016-04-12
