
助推滑翔导弹突防对区域反导雷达威胁分析
2015-03-25 02:35罗冰
舰船电子对抗 2015年4期
罗 冰
(中国电子科技集团公司第38研究所,合肥 230031)
助推滑翔导弹突防对区域反导雷达威胁分析
罗 冰
(中国电子科技集团公司第38研究所,合肥 230031)
在考察助推滑翔导弹运动特点和突防区域的基础上,总结分析了其临近空间高速运动形成的等离子隐身问题,指出消除隐身威胁可采取的方法途径。并进一步探讨了助推滑翔导弹兼具弹道导弹和巡航导弹高速高机动的特点,以及在临近空间突防路径条件下的反搜索和跟踪的比较优势,并举例说明多功能反导雷达在面临其威胁时需要面临的问题和对策。
助推滑翔导弹;反导;隐身;跟踪;搜索
0 引 言
随着具有高速突防能力的战略弹道导弹体系及技术的普遍战术化、高机动化,出现大量强突防的中长程导弹,在此形势下,也加速了雷达对反导能力的需求。比如:基于相控阵多功能技术,将防空与反导功能一体化、具备高机动前沿部署、战略与战术能力兼具的雷达也就越来越受到亲睐。多数反导多功能雷达是陆海部署,视野有限,资源入不敷出,在反导功能上都存在相同或相似的弱点,特别是对于高速、低空和机动弹道的导弹往往会出现预警探测距离不够、捕获概率不足的问题。
目前多数文献主要针对具有准抛物线的弹道导弹和低空巡航导弹拦截问题进行分析。弹道导弹突防速度高但轨道可预测性较好,往往采用预警引导和高精度跟踪的多级防御方式[1];巡航导弹一般采用低空突防方式但速度多为音速以下,相当于低空突防的小飞机,一般强调升空预警和雷达下视杂波探测能力[2]。
一直以来国内外在加速研究和部署兼具弹道导弹高速性能和飞航导弹机动性能的“助推滑翔”导弹和飞行器。助推滑翔导弹或飞行器兼具弹道导弹高速突防能力和飞航导弹机动变轨能力的特点,并且其突防方式往往会给许多雷达的反导能力制造了较大威胁,有必要对这种导弹的拦截和预警过程中可能出现的问题进行分析,探讨其威胁所在。
1 助推滑翔导弹(飞行器)简介
1933年,德国科学家Eugene Sanger首先提出了助推-滑翔式弹道的概念,20世纪40年代末,钱学森教授也提出了一种助推-滑翔式弹道,后来被人们称为“钱学森弹道”,其前段采用弹道式弹道,后段为滑翔弹道。助推-滑翔式弹道确实沉寂过一段时间,但近些年成为研究热点,得到国内外广泛关注。国外的相关研究已经进入飞行试验和部署阶段,二战后,美国就开始了助推-滑翔飞行器的研究,比较富有代表性的计划包括BOMI、Dyna-Soar、AlphaDraco、BGRV、HGV、CAV等,其中比较著名的是CAV,可以攻击15 000 km以外的目标,比如X-43A已经达到10 Ma的速度,2010年5月26日,X-51A首次进行了高超声速动力飞行试验,试验时间接近3.5 min,最高速度达5 Ma;俄罗斯的“白杨”高机动导弹也可以在外大气层变轨,也可在大气层内多次机动变轨,突破防御系统;国内也有很多专家在开展相关研究,且有了很多论证方案,并在核心技术方面有不断的突破。助推-滑翔导弹由助推器和滑翔飞行器组成,一般采用运载火箭或运输机等作为运载和助推器,滑翔飞行器采用高升阻比气动外形,所谓助推-滑翔式弹道,其核心特点,就是在助推段利用运载火箭加速爬升,在滑翔段,利用导弹的气动外形,可以依靠气动升力实现远距离的滑翔式飞行。运载火箭助推-滑翔式导弹,将身兼弹道导弹和飞航导弹的特点,导弹射程远,飞行速度大,在增大射程与提高生存能力方面跟常规弹道相比具有独特的优势。在超声速或高超声速飞行条件下,可实现远距离快速打击,且滑翔段弹道可为跳跃式或S形,有高机动性的特点,能有效突破导弹防御系统的拦截,军事用途十分突出[3-5]。其参考弹道示意图如图1所示。

图1 地基助推滑翔导弹(飞行器)飞行轨迹示意图
助推滑翔导弹的发射角、关机点、主动段行程的参数确定需要根据射程决定,并根据机动能力要求进行优化[6]。无论是助推滑翔导弹或是所谓超高音速飞行器,其基本飞行特点归结如下:
(1) 采用火箭或其他运载工具助推,短时间内将导弹或飞行器加速到超高声速以上,比如大于18 Ma或更高(计入再入速度),整个飞行阶段可以维持在不低于3~5 Ma以上的速度。属于高音速或超高音速目标。
(2) 临近空间是其主要突防飞行区间(20~100 km),即在飞行中段(包括:自由飞行阶段,再入滑翔或补充动力飞行阶段);再入滑翔阶段也可能因跳跃弹道而短时间超出临近空间高度。
(3) 飞行轨迹的基本特点是:助推段和自由飞行段主要在外空间以弹道导弹的准抛物线轨迹飞行,再入滑翔段则类似飞航导弹基本水平或跳跃滑翔,特别在再入飞行段,利用气动特性可以在一定范围内变动轨迹,弹道具有不可预测性。
以上几个基本特点,将为雷达反导功能带来一系列威胁:
首先,高速弹头或飞行器在临近空间将产生等离子鞘套和拖尾,从而影响照射目标雷达截面(RCS),严重情况会形成隐身,导致雷达失去目标。
其次,飞行器往往以高超声速机动飞行在近空间,突防区域基本在雷达的远距离低仰角区,将影响雷达搜索跟踪效率,需要分析其影响。
2 等离子鞘套对雷达目标RCS影响分析及对策
高速近空间飞行器以大约≥5~25 Ma的速度在近空间飞行时,与周围的空气剧烈摩擦并对空气产生压缩,使飞行器周围的空气温度急剧上升(一般情况下:速度为6 Ma时,飞行器的表面温度会超过1 500℃;速度为8 Ma时,飞行器的表面温度会超过3 000℃),致使空气和被烧蚀的材料均发生电离,从而在飞行器四周形成高温等离子体,称之为“等离子鞘(套)”。等离子体和电磁波发生相互作用,会引起电磁波传输衰减、天线的阻抗失配、方向图畸变、辐射效率下降甚至被击穿,从而影响飞行器无线通信严重失效,甚至完全中断,这就是所谓 “黑障”现象;当然,同样也会影响其RCS,可能导致RCS大幅度下降以至丢失目标,这也可称为等离子“隐身”。
临近空间飞行器产生等离子鞘及尾流是一个复杂的物理、化学、热力学、气动力学过程,非线性特征十分突出,分析方法和手段目前并不完善,往往通过试验结合算法分析验证数据。但基本作用机理是清晰的:电磁波进入等离子体时,带正电荷的离子和带负电荷的自由电子,在电磁场的作用下运动,电磁波把能量传递给带电粒子。运动过程中,带电粒子不断与中性离子发生碰撞,碰撞过程中把能量传递给中性粒子,结果电磁波的功率受到衰减,这种衰减称为吸收衰减。吸收衰减随等离子体厚度增加而变大。因为各种因素,等离子体不可能是均匀的,电磁波在等离子体的分界面处会发生反射,形成反射衰减。等离子体中电磁波的衰减主要是这2种,其中,吸收衰减是“黑障”或“隐身”形成的主要原因。
电磁分析上一般把等离子体看作一种系数动态变化的介质。不妨以非磁化均匀等离子体衰减特性为例做一个简单的定性分析。
等离子体中电磁波数:
(1)
式中:k0=ω/c为真空波数;c=3×108m/s,为真空光速;β和α分别为等离子体中电磁波的相位常数和衰减常数;εr为非磁化等离子体相对介电常数:
(2)
式中:ω为电磁波角频率;ven为等离子体碰撞频率(一般是电子密度和温度的函数);ωp为等离子频率,并有:
式中:ne和ni分别为等离子体电子密度和离子密度,且ne=ni;ε0=8.85×10-12F/m,为真空介电常数;me=9.11×10-31kg,为电子质量;mi=1.67×10-27kg,为离子质量;e=1.6×10-19C,为电子电量。
最后可以算得(以α为例,β代入影响参数相同):
电磁波在上述的等离子(均匀非磁化)内传播单位距离时,衰减率理论值为(单程):
A=abs(10lge-2αd)≈8.68α(dB/m)
可以从衰减常数α对飞行器周围等离子体鞘套中的电磁波衰减量进行简单的估算,从而评估等离子体对电波的电磁屏蔽或目标反射吸收的效果。从公式不难发现,影响等离子体对电波衰减的内在因素是:电子密度、碰撞频率、电磁波频率。电子密度、碰撞频率与空气(严格说包括烧气混合物)密度和温度相关联。至于产生等离子体的外在因素则是:产生电离的温度和压力。
试验观察和理论分析证明临近空间飞行器等离子鞘有如下规律[7-8]:
(1) 等离体黑障或隐身往往只能发生在100~20km的临近空间高度。更高空间空气稀薄,ne和ven都很小,故ω≫ωp,ω≫ven,则有α→0;更低空间空气密度大,ven很大,一般有ven≫ωp,ven≫ω,则α→0。
(2) 等离体对电磁波呈现高通趋势频率特性,同等条件下频率越高衰减越小,临界频率是碰撞频率ven。在实际应用中,等离子体应当处于高碰撞频率的状态,这在大气压非平衡等离子体中一般能满足要求。临近空间飞行体一般再入速度≥5 Ma,典型截止频率大约在1~9 GHz左右,会因运动状态和空间位置情况的不同而有变化。
(3) 相同角度入射的电磁波在碰撞频率高的等离子体中入射深度大,吸收衰减大。相对于低碰撞频率,高碰撞频率等离子体对低频率的电磁波的衰减能力较低,对高频率的电磁波衰减能力较高。即所谓的“谐振吸收”优先原则。
(4) 同等条件下,厚度越厚,对电波的衰减越大。现有飞行器典型再入速度条件下,等离子体鞘厚度大约10~20 cm左右。
(5) 弹头再入速度越高,弹头温度压力越高,等离子对电磁波的影响程度越严重,时间越长。
综合来说,飞行器出现无线中断或隐身的高度一般在100~20 km之间。飞行器无线中断或隐身的高度、时间与飞行器外形、攻角、表面材料、再入速度、飞行高度、工作频率、发射机功率、接收机灵敏度等因素有关。
雷达隐身的试验数据和理论分析则指出等离子鞘对RCS影响解释如下[9-10]:
(1) 飞行器等离子体尾流的强体散射和弱面散射的方式转换(同样与速度、温度和气流状态关联)。
(2) 飞行器包覆等离子体折射和吸收隐身。
(3) 对于L、S、C等频段,飞行器本体RCS降低,尾迹也偏小。
(4) 在频率比较低的频段,尾迹RCS有可能大于飞行器本体RCS,因而可以考虑利用低频段雷达,例如P波段或频率更低的超视距雷达,对其进行探测。
鉴于以上分析,针对助推滑翔导弹在临近空间RCS不确定性的探测可采用如下应对措施:
(1) 选用高频雷达做探测跟踪,比如X波段或更高;
(2) 针对等离子体尾流,选用较低频率的进行探测跟踪,比如P波段或更低;
(3) 避开容易黑障的频率,比如:L、S、C波段;
(4) 部署多频段雷达组网或双多基地雷达;
(5) 提高雷达功率孔径能力;
3 助推滑翔导弹临近空间突防对区域反导雷达搜索和跟踪能力的影响
为便于分析,假设导弹隐身的威胁不存在,助推滑翔导弹仍然具有高速和机动变轨的威胁能力。并结合具体对比例子,分析高速机动助推滑翔导弹对雷达截获、机动跟踪能力的影响。
根据导弹防御的基本策略和区域防空多功能雷达在防御体系中的角色,区域防空多功能雷达作用距离一般在1 000 km的量级,这从SPY-1和TPY-2两型典型雷达的公开指标可以看出。对导弹等高速小RCS目标的关键作用距离应当在500~200 km,因为反导指控系统需要足够的反应时间,根据爱国者、S-400等反导导弹的发射准备时间判断,实际需求应当在60~90 s以上的发现和准备时间,极限条件下不能少于10 s。
3.1 对反导搜索截获的影响分析
当雷达工作于自主搜索的反导模式时,为在最大距离上发现导弹这类小目标,多功能雷达多数发射针状波束以获取最大增益,这往往需要设置反导截获屏[11],针对巡航导弹超低空突防和高速弹道导弹助推段速度相对慢且可获得更多预警时间的特点和目的出发,反导截获屏往往设置在低仰角区域。特别对于自主搜索来说,数据率与目标速度对性能结果影响比较大。助推滑翔导弹兼具高速和高机动的优点,因而先就速度与巡航导弹作对比分析。
反导搜索截获时间原理计算公式如下:
(5)
式中:T为波束驻留时间;φ为SPY雷达方位覆盖范围;Δφ为波束宽度;η为波束扫描间隔,为简化分析这里取1。
以SPY-1为例,波束宽度为0.87°×0.87°,假设方位面覆盖90°,远程工作模式重频选100Hz,雷达在方位上设置一道截获屏,在忽略波位切换时间影响的条件下可以计算出雷达刷屏一次消耗时间资源为1 030ms。
继续假设助推滑翔导弹速度为3.4km/s(全程平均速度10Ma),突防高度20km;巡航导弹飞行在亚音速并假设为0.3km/s(全程平均速度0.9Ma),突防高度100m;SPY-1架高100m;则理论上的发现距离(仅仅考虑地球曲率的影响,不计距离和功率关联因素)约为:助推滑翔导弹为620km,预警时间为182s;巡航导弹为82km,预警时间273s。相对于巡航导弹,助推滑翔导弹将可能缩短雷达的预警时间约30%。

图2 导弹穿越截屏示意图
导弹穿屏时间原理计算公式(单波束):
(6)
式中: Δφ为仰角空间截获屏的覆盖区域;R为导弹与雷达的相对距离;α为导弹穿屏夹角。
从目标探测信噪比积累来说,穿屏时间长短将影响检测概率。继续引用前述条件,假设都是垂直穿屏(穿屏角取90°,距离最短),则助推滑翔导弹的穿屏时间为2.7s(单屏),脉冲累积次数为2.6;巡航导弹的穿屏时间为4s(单屏),脉冲累积次数为3.9次。对相参雷达,助推滑翔导弹理论上可以使得雷达的检测信噪比增益降低约1.5dB,也就是降低了雷达截获概率或者截获距离。
对于高速目标,为提高截获概率,往往会设置数道截获屏,以保证穿屏速度或小目标的可靠截获。当然,这是以牺牲雷达资源为代价的。
3.2 对跟踪搜索能力的影响
一般防空雷达跟踪数据率在6s/次量级,这是因为目标速度很少超过3Ma,多数情况下基本不会超过1个波位覆盖区域。对于弹道导弹等高速目标,则可以轻易跳出几个波位空间范围,因而反导雷达的跟踪数据率要求高,一般水平大约1~10采样/s,需要具备三维相扫或空域宽覆盖能力,多功能相控阵雷达是主流配置[1]。
对于数据率的要求,可以从上节有关穿屏时间上得出结论:继续以SPY-1为例,假如滑翔导弹和巡航导弹距离雷达位置相同,都是100km处,考虑单波束跟踪的理想情况,则滑翔导弹穿过单个波束逃逸时间为0.45s,那么,要保证连续跟踪不丢目标需要的数据率是0.45s/次;巡航导弹的逃逸时间为5.1s,两者数据率相差很大。
高数据率带来的代价是:雷达处理目标的批次数目将会大大降低。同等条件下,假如都采用一个重频(10ms)完成目标检测,则雷达能跟踪的高速导弹数目是4批,对低速目标则是51批。
雷达进入跟踪状态后,往往根据测量精度设置跟踪波门,并根据目标运动模型,在获取目标参数后进行目标状态更新和预测。模型准确、测量精度高,则波门设置紧凑,跟踪运算就能及时实施,多目标条件下运算压力就小。
弹道导弹在助推后进入外大气空间,并关闭动力,基本只在星空条件下飞行,再入大气后也基本是在一种自由飞行状态下高速向目标运动,其轨道曲线基本呈准抛物线状态,轨道是基本可以预估的[11]。但助推滑翔导弹因突防区域在近空间,在关闭动力条件下仍然具有较强的机动变轨能力且能在较长时间内保持初速度基本不变,这种能力将会使反导雷达跟踪目标丢失。雷达必须重新搜索截获,或者将跟踪波门增大并执行跟踪状态下的搜索。显然跟踪状态下的搜索对目标探测来说不会造成增批,更为合理,资源消耗更少。
可对此情况做一简要分析,这个问题其实仍然是一个搜索问题,不过范围有所区别。可在两种情况下启用这种搜索方式:外部信息引导产生范围误差过大或是目标高速运动产生的穿越效应,都有可能造成重新搜索或在跟踪条件下的二次搜索并确定搜索区域和动态变化情况。
机动目标变轨是在三维空间内变化,搜索则在立体空间内进行。具体到雷达波束,则可以认为是波束横切面的平面覆盖问题,图3为一种比较简单直接的重新搜索区域示意图(拓扑形式之一),中心波束为当前目标存在区域(假设为单个波束跟踪),周围波束覆盖区域为目标可能逃逸的位置或二次搜索区域。
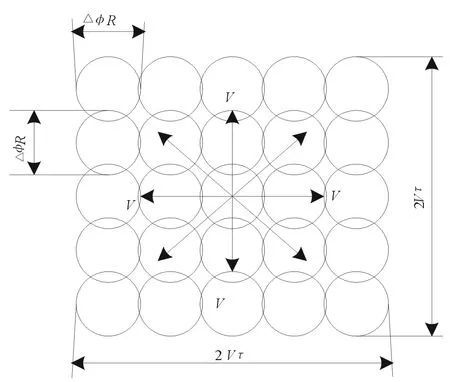
图3 二次跟踪搜索原理示意图
二次搜索可能需要的搜索次数可用以下公式界定:

(7)
式中:n为搜索总次数;τ为采样间隔时间。
不妨继续以前述SPY-1为例,假设雷达因故执行的采样率是1s/次。助推滑翔导弹在突防区飞行到离雷达100km处,突然以3.4km/s速度向下俯冲并造成目标逃逸,则雷达二次搜索需要进行24次才可能再次捕获跟踪目标,并挤占跟踪资源,但这相比重新进入搜索状态来说消耗的资源要小。当二次搜索范围出现多目标,则需要进行较为复杂的关联问题处理,或者引起目标增批。
另外,助推滑翔导弹的中段在近空间区域,相对弹道导弹来说与雷达距离近数倍,同等速度下的高仰角跟踪需要更高的数据率才能保证可靠跟踪。
4 结束语
通过以上对助推滑翔导弹的运动特点、突防区间等简要定性和举例分析,不难看出这类导弹或飞行器兼具弹道导弹超高速和巡航导弹高机动的双重特点,当从临近空间进行突防将对多功能雷达反导能力发出严峻的挑战。首先,在临近空间的高速运动条件下将会产生热隐身现象,对雷达的工作频率、体制、功率孔径积都造成威胁;其次,临近空间高速运动的助推滑翔导弹相对于低空飞行的巡航导弹可能对雷达截获距离、截获概率有进一步压缩,可靠截获需要消耗更多的雷达资源;第三,助推滑翔导弹高速高机动运动能力,相对于弹道导弹跟踪更容易逃逸,需要进行跟踪条件下的二次搜索,相当于间接扩展了雷达跟踪波门,直接造成雷达资源消耗过大;另外,由于其特殊的突防区间,在高仰角跟踪条件下与雷达距离远小于弹道导弹,穿屏时间更短,更容易丢失目标。
有关助推滑翔导弹和飞行器临近空间突防对反导雷达的威胁和应对手段涉及雷达系统和技术的方方面面[12-13]。随着多功能雷达在区域反导中的地位不断提高,助推滑翔导弹及全球打击飞行器的不断普及,探讨多功能雷达反导性能在针对助推滑翔导弹的探测跟踪所需要注意的关键问题显得尤其有必要,这对目前讨论较多的弹道导弹和巡航导弹的探测、截获、跟踪问题同样是有益的。
[1] 张光义,王德纯.弹道导弹防御系统中的预警探测雷达[J].系统工程与电子技术,1996(5):39-47.
[2] 李瑜,于荣.巡航导弹的预警探测与反突防总体设计[J].指挥信息系统与技术,2014,5(3):28-88.
[3] 关世义.基于钱学森弹道的新概念飞航导弹[J].飞航导弹,2003(1):1-4.
[4] 李瑜,崔乃刚,郭继锋.助推-滑翔导弹发展概况及关键技术分析[J].战术导弹技术,2008(5):13-19.
[5] 叶洁.美国高超声速飞行器技术发展初步研究[J].飞航导弹,2014(8):15-20.
[6] 刘欣,杨涛,张青斌.助推-滑翔导弹弹道优化与总体参数分析[J].弹道学报,2012,24(3):43-48.
[7] 赵向阳.黑障对无线电信号的影响分析与研究[D].兰州:兰州大学,2012.
[8] 郑灵.飞行器等离子体鞘套对电磁波传输特性的影响研究[D].成都:电子科技大学,2013.
[9] 朱方.返回舱再入段雷达散射特性研究[D].兰州:兰州大学,2007.
[10]于哲峰,刘佳琪,刘连元.临近空间高超声速飞行器RCS特性研究[J].宇航学报,2014,35(6):713-719.
[11]张海成,杨江平,王晗中.舰载SPY雷达对弹道导弹探测效能分析[J].现代雷达,2012,34(1):1-24.
[12]余继周,黄鹂,曹哲.临近空间高超声速飞行器探测雷达技术[J].控制与制导,2014(9):74-76.
[13]关欣,赵静,何友.临近空间高超声速飞行器跟踪技术[J].四川兵工学报,2011,32(8):4-6.
Threat Analysis Booster Glide Missile Penetration to Area Antimissile Radar
LUO Bing
(No.38 Research Institute of CETC,Hefei 230031,China)
Based on inspecting the motion characteristics of booster glide missile and penetration area,this paper sums up and analyzes the plasma stealth formed by high-speed movement in near space,points out the approach to eliminate the stealth threat,and further discusses that the booster glide missile has characteristics of high-speed and high-mobility like ballistic missile and cruise missile concurrently,and the comparative advantage of anti-searching and anti-tracking under the condition of near space penetration path,and illustrates the problem and countermeasure that multi-function anti-missile radars need confront when they face threats.
booster glide missile;anti-missile;stealth;tracking;searching
2015-03-16
TN959
A
CN32-1413(2015)04-0044-06
10.16426/j.cnki.jcdzdk.2015.04.012
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
上海人大月刊(2022年5期)2022-05-19
军民两用技术与产品(2021年7期)2021-10-13
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
空间科学学报(2021年6期)2021-03-09
北京航空航天大学学报(2020年3期)2021-01-14
人大建设(2018年6期)2018-08-16
当代陕西(2018年6期)2018-05-22
百科探秘·航空航天(2015年10期)2015-11-07
