
高斯混合分布激光中心线提取方法
2015-03-23 06:07:34王灵丽樊超楠贾振元
激光与红外 2015年11期
刘 巍,张 驰,刘 阳,王灵丽,樊超楠,贾振元
(大连理工大学机械工程学院,辽宁大连116024)
1 引言
基于辅助激光的立体视觉几何量测量方法因其非接触性、高精度、高效率广泛应用于复杂环境下大尺寸零件的几何量测量当中[1]。特别是对高端核心装备关键零部件锻造过程中的在线尺寸测量尤为重要,该类大型(5 m×10 m范围)轴类、方形柱类零部件热态几何参数测量现场环境恶劣,因此采用半导体线激光投射到锻件表面,由光条几何形状间接表征待测锻件几何参数[2]。然而,该类激光器光条截面分布特性各异,导致中心提取精度与稳定性较差,目前仍没有很好地解决办法。
国内外学者针对激光条的快速提取做了很多研究。张旭萍等[3]提出一种基于极线匹配的新的相位一致性的光条中心提取方法,适合处理具有对称结构的图像特征;厦门大学于永涛等[4]针对激光扫描过程中镜面反射造成的激光条干扰,对异常值进行去除;张瑞瑛等[5]提出一种基于感兴趣区域的光条中心提取方法,能够快速提取过曝的红外(808nm)激光条中心;孙军华等[6]提出一种基于卡尔曼滤波的光条区域预测和灰度最大值、Hessian矩阵相结合的中心提取方法,与经典的Steger方法对照误差为0.02 pixel。但是以上方法并没有很好的解决针对半导体激光器发光原理导致的激光条能量非高斯非对称分布的提取问题。所以本文提出了一种基于高斯混合模型的图像多激光条的搜索以及提取方法。
本文首先研究激光散斑对光条成像质量的影响机理以确定图像滤波方法,并以此为基础采用OTSU方法[7]对光条位置进行粗定位,为光条中心点精提取奠定基础。通过对光条横截面分布的分析,提出了可准确描述这种非高斯非对称分布特性的高斯混合模型,确定亚像素中心极值点坐标作为光条每行横截面的特征点坐标。具体提取流程为高斯混合模型拟合确定光条分布类型,再以邻近行中心极值点邻域进行二项式拟合求该行中心极值位置,实验结果证明了提取方法的精度与稳定性。
2 光条横截面光强灰度分布模型
2.1 图像的噪声去除
图像采集后得到的数字图像包含成像过程中的CCD成像器件噪声、图像采集卡噪声,而且作为图像采集对象的激光条有散斑现象,严重影响激光成像质量。散斑是一种颗粒噪声,普遍存在于光学成像的过程中,由于激光的高度相干性,激光散斑现象更加明显[8],因此去除激光的散斑噪声是图像预处理的主要目的,典型的散斑颗粒图像如图1所示。
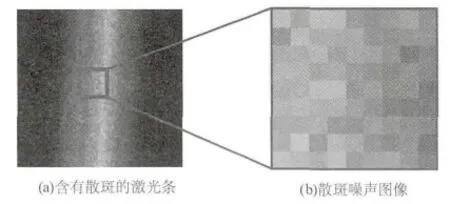
图1 含有散斑颗粒噪声的光条图像Fig.1 Image of laser stripe with speckle-noised
散斑对激光强度的影响用散斑的对比度表示。如果散射体表面足够粗糙,对比度为1。散斑属于乘性噪声,即散斑噪声在图像中伴随着激光存在,对激光条上像素的灰度值产生很大影响;因此,建立图像中像素点(u,v)坐标处含有散斑噪声与图像采集系统噪声的激光灰度值Iim(u,v)公式:
式中,Ila(u,v)为无散斑影响的激光灰度值,θsp(u,v)表示像素点(u,v)为中心m×n大小的δ邻域内样本的散斑对比度;In(u,v)表示图像采集中成像与采集器件的噪声,相较于散斑噪声其值较小,可以忽略不计[9]。
频域滤波适合去除全图中分布的噪声信息,而散斑噪声只存在激光里,因此不适合在频域处理。空域滤波是根据邻域灰度分布情况直接改变像素点灰度值的特性,而空域滤波方法中均值滤波方法的原理为用m×n邻域内的像素灰度均值代替原像素灰度值,适用于去除颗粒状分布的噪声,平滑原始图像的灰度分布。因此,选用均值滤波方法去除散斑噪声这种颗粒噪声对激光灰度的影响。
2.2 光条横截面光强灰度典型分布
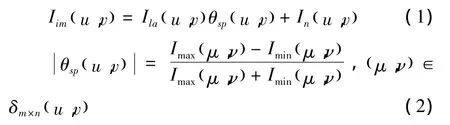
线性激光器投射在物体表面形成具有一定宽度的激光条,需要细化为无宽度的坐标才可以完成立体视觉匹配。而不同的半导体激光器产生的激光条截面分布特性不同,给提取带来困难。我们对10台功率范围在300~1100 mW可调的450 nm激光器进行研究,将其投射在漫反射平面上,分析发现:激光器输出参数的微小变化对分布有很大影响;不同激光器在不同功率下的光条截面分布特性各异,如图2所示,且主要呈现以下3种波形分布:单峰光条(图2(b))、双峰光条(图2(c))、三峰光条(图2(d))。
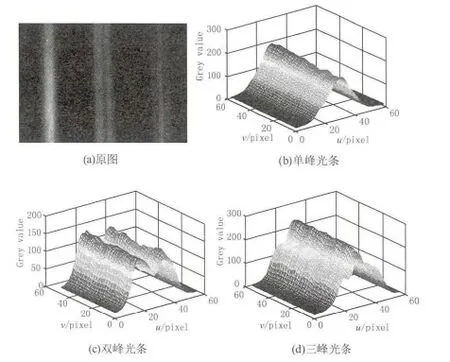
图2 激光条灰度分布三维图Fig.2 Gray distribution of laser strips
2.3 光条横截面光强灰度分布模型
由激光条截面灰度分布可以看出,所有光条横截面光强均呈单峰或多峰模式的分布特性,且分布特性受拍摄角度影响,并非中心对称分布。半导体激光器采用激光二极管作为发光单元,这种激光二极管由多个相互耦合的条形有源区构成,光条截面分布特征十分复杂。目前国内外学者常用的光束模型近似表达式有厄米高斯模型、贝塞尔高斯模型及高斯-谢尔模型、拉盖尔高斯模型、厄米正弦高斯模型和厄米双曲正弦高斯模型[10]等。这些模型虽然能够描述单峰或双峰模式的光条分布,但不能真实反映实际观测到的三峰模式光条。根据激光条的实际分布状态,建立符合半导体激光器横截面光强分布的高斯混合模型,如公式(3)所示:

用高斯混合分布模型拟合三种典型波形效果如图3所示。
我们称光强分布的中心波峰/中心波谷为中心极值点,由图3可以看出拟合曲线与原始数据贴合,中心极值点位置拟合精度很高。以拟合优度(公式(4))作为高斯混合模型与实际光条横截面光强分布符合程度的评价公式,检验模型拟合程度。
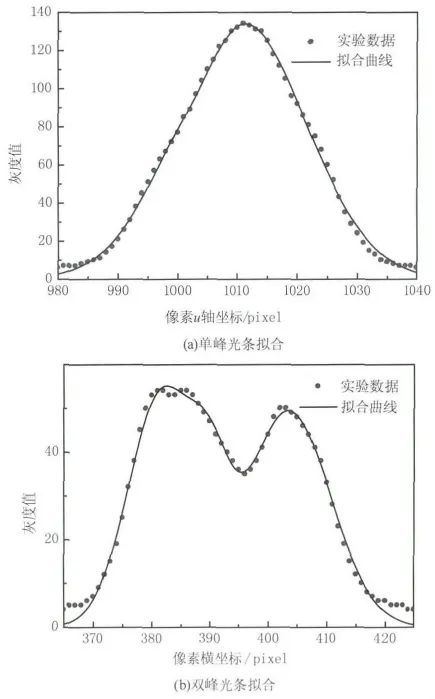
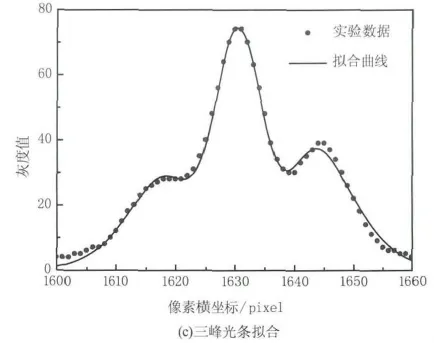
图3 激光条横截面灰度分布高斯混合模型拟合结果Fig.3 Curve fitting for the cross section gray distribution of laser strips based on Gaussian mixture model

计算不同激光器不同功率下的拟合优度,图4显示了1号~5号激光器的300~1100 mW的拟合度。模型的拟合优度均高于0.94,因此模型可以真实准确地描述半导体线激光的横截面光强分布。
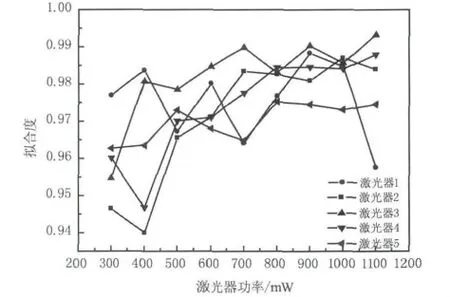
图4 不同激光器拟合度图Fig.4 Comparison of fitting degree between different lasers
3 光条中心线提取方法流程
3.1 图像中光条区域粗定位
在对激光条中心线进行精提取之前,需要对激光条进行粗定位,确定初始位置。本文采用OTSU法[7]对图像二值化,OTSU是一种基于最大类间方差的确定灰度阈值的图像前景与背景分割方法,可以准确高效地对图像激光条的位置进行粗定位,将光条与背景分离,确定光条的中心精提取的处理范围,为精提取提供基础。
3.2 光条有效对应特征中心的确定
物体表面某一点邻域内在两个相机中所成的像的灰度模式是相似的。相机从不同角度接收光条发光,其横截面分布会被压缩或拉伸[11]。但其中心极值点的相对位置不变,特性稳定,选取光条横截面的中心极值点作为左右图像的匹配点特征。光条提取的目的即为提取光条横截面中心极值坐标点连线——中心极值线,作为左右相机的匹配特征线。
3.3 光条中心线提取方法
对于高斯混合分布模型,以MATLAB拟合9个参数的3阶高斯混合模型为例,单次拟合时间约为0.25 s,速度较慢,考虑采用其他方法进行拟合。
考虑物体表面的小区域,可以假设它是光滑连续的[11],因此在光条纵向上认为其中心极值点的位置在连续两行像素上相差较小。将第i行光条横截面采用高斯混合模型拟合,求出中心点,在第(i+1)行采用二项式I=au2+bu+c拟合,拟合范围是以第i行中心极值点ui为中心的σ像素邻域,那么第(i+1)行中心极值点ui+1的位置为拟合曲线的极值位置,依此类推。光条中心点搜索的示意图如图5所示。二项式拟合较高斯混合模型拟合参数少、运算速度快,处理效率大大提高。每隔n行采用高斯混合模型拟合进行中心极值点校准,保证中心点提取的稳定性。
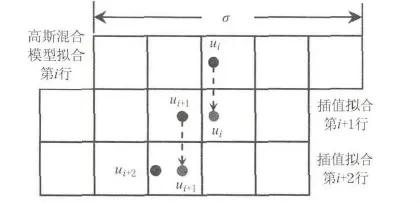
图5 中心点逐行搜索示意图Fig.5 Scheme of searching in line-by-line format
光条中心线精提取的流程如下:
1)每隔n行对截面进行高斯混合模型拟合,用最小二乘法进行多阶高斯混合模型参数估计;设光条长度为m,共有m/n行采用高斯混合模型拟合;
2)以第i行为起始搜索行向下进行搜索,在第i+1行选择第i行中心极值点位置为中心的σ像素邻域内以二项式拟合,将其极值位置作为第i+1行中心极值点位置。光条中心线提取的总体流程图如图6所示。
4 实验与分析
通过实验提取漫反射表面的三种类型光条中心,验证其提取效果与精度。图7为实验系统图,实验采用波长450 nm的激光器在均匀漫反射表面投射多激光条,采用分辨率为4008 pixel×2672 pixel的相机加装(450±20)nm的滤光片采集特征图像,焦距35 mm,光圈数F8,两相机间距2 m,相机距投射表面4 m,激光器距投射表面5 m。
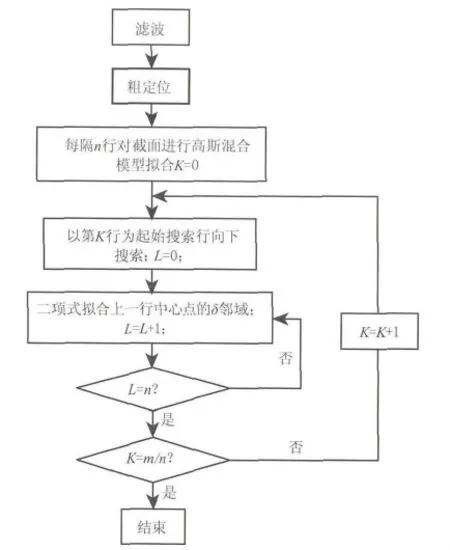
图6 光条中心线提取方法流程图Fig.6 Flow chart of centerline extraction for laser stripes
首先用大小5×5的均值模板对原图滤波去噪,滤波前后的光条灰度分布效果对比如图8所示,均值滤波后消除了散斑对激光光强分布造成的颗粒噪声,保留了激光的波形信息。通过OTSU法粗定位,如图9(a)所示,由于激光器波长在滤光片通带范围以及相机的感光波段内且能量集中,因此光条亮度较高,阈值法处理效果较好,再用图像处理形态学方法中的小面积连通模板去除非光条的小连通区域,如图9(b)所示,即可标记出图像中所有的光条区域。然后提取上文中提及的三种典型的光条的中心线点,如图10所示,本文方法可以完整地提取光条中心线。单峰结构光条分布特性简单,现有的方法与本文方法均可准确的提取中心点。然而双峰结构与三峰结构的光条分布特性较复杂,现有方法不能准确描述光条分布特性,提取结果不理想,不同方法中心提取结果对比如图11所示。图中可以看出本文提取方法最接近中心极值,能够真实反映中心极值点位置,性质稳定,能够得到左右图像的光条有效对应特征,保证立体视觉测量的匹配精度。图12为采用灰度重心方法与本文方法提取中心线的结果,可以看出本文提取方法比灰度重心法更符合光条中心极值线。由于激光投射的漫反射表面平面度误差小于<0.3 mm,小于相机单像素分辨率,对光条的所有数据点进行直线拟合,理想情况下,提取的所有中心点应在同一条直线上,用提取结果拟合直线后,计算数据点到直线的距离,用均方差表示中心线提取的稳定性,如表1所示,三根光条均方差均小于0.22 pixel,表明提出的中心提取方法稳定性较好,满足测量要求。
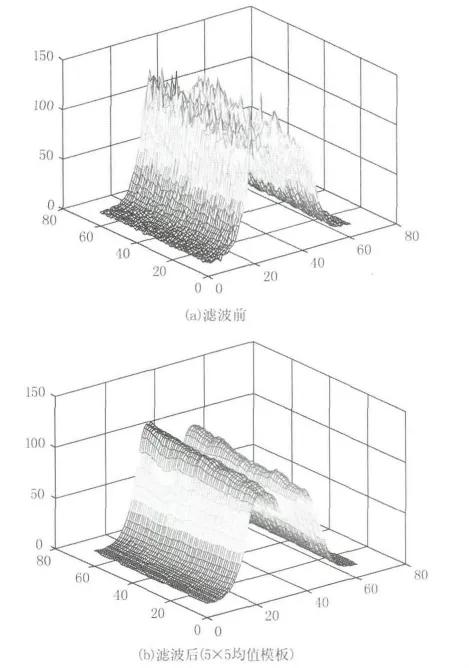
图8 激光条灰度分布图Fig.8 Gray distribution of the laser stripe
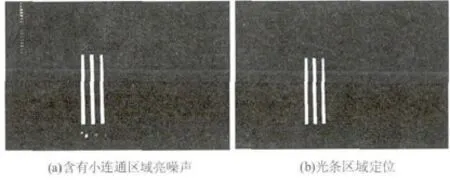
图9 激光条粗定位Fig.9 Rough region positioning for laser stripes

图10 光条中心线提取方法结果Fig.10 Centerline extraction results of laser stripes
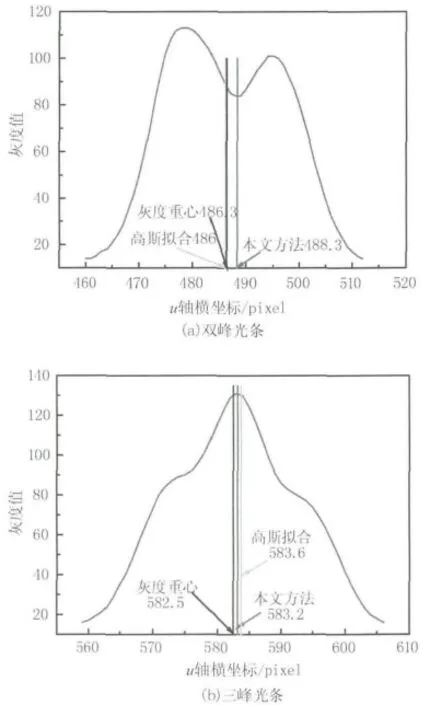
图11 不同方法提取结果对比Fig.11 Result comparison of different extraction methods
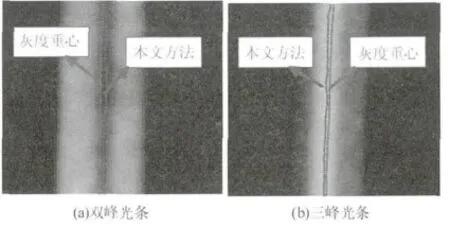
图12 本文方法与灰度重心法对比Fig.12 Result comparison between the proposed extraction method and gray weighted centroid extraction method
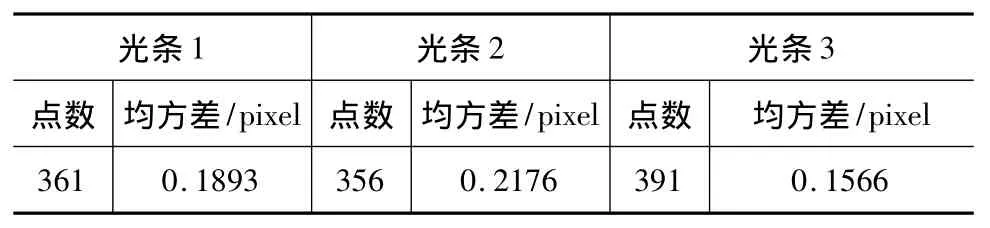
表1 光条中心线提取误差Tab.1 Centerline extraction error of laser stripes
5 结束语
本文提出了一种基于高斯混合模型的激光条中心线提取方法,能够根据建立的光条法向横截面的光强分布模型,确定这种非高斯非对称分布的光条在左右图像对应的特征中心极值线,较传统中心提取方法精度高,提取精度达到亚像素级,稳定性较好,满足测量要求。
[1] NIE Shaomin,LI Shukui.Review of on-line dimension measurement for hot large forging[J].Metal Working,2008,(11):22-25.(in Chinese)聂绍珉,李树奎.大锻件热态在线尺寸测量研究综述[J].金属加工:热加工,2008,(11):22-25.
[2] LIU Wei,LIU Shuangjun,JIA Zhenyuan,et al.Study on on-line measurement system of dimension for hot heavy forging[J].Piezoelectrics&Acoustooptics,2011,33(5):831-836.(in Chinese)刘巍,刘双军,贾振元,等.大型锻件尺寸在线测量系统研究[J].压电与声光,2011,33(5):831-836.
[3] ZHANG Xuping,WANG Jiaqi,ZHANG Yixin,et al.Large-scale three-dimensional stereo vision geometric measurement system[J].Acta Optica Sinica,2012,32(3):140-147.(in Chinese)张旭苹,汪家其,张益昕,等.大尺度三维几何尺寸立体视觉测量系统实现[J].光学学报,2012,32(3):140-147.
[4] Yu Y,Li J,Jia F,et al.Three-dimensional object matching in mobile laser scanning point clouds[J].IEEE Geoscience and Remote Sensing Letters,2014,12(3):492-496.
[5] ZHANG Ruiying,ZHOU Ping,FENG Xu,et al.Rapid extraction of line-structured light stripe in large field of view[J].Journal of Applied Optics,2010,31(3):432-436.(in Chinese)张瑞瑛,周萍,冯煦,等.大视场下线结构光光条中心的快速提取[J].应用光学,2010,31(3):432-436.
[6] SUN Junhua,WANG Heng,LIU Zhen,et al.Rapid extraction algorithm of laser stripe center in rail wear dynamic measurement[J].Optics and Precision Engineering,2011,19(3):690.(in Chinese)孙军华,王恒,刘震,等.钢轨磨耗动态测量中激光光条中心的快速提取[J].光学 精密工程,2011,19(3):690.
[7] Otsu N.Discriminant and least square threshold selection[C].Proc 4IJCPR,1978:592-596.
[8] WEN Donghai,JIANG Yuesong,ZHANG Xuguo,et al.Speckle characteristics of laser radar polarization imaging and despecking algorithm[J].Acta Optica Sinica,2013(3):122-129.(in Chinese)闻东海,江月松,张绪国,等.激光偏振成像散斑统计特性和抑制方法研究[J].光学学报,2013(3):122-129.
[9] XU Xiuzhen,LI Zitian,XUE Lijun.Analysis and processing of CCD noise[J].Infrared and Laser Engineering,2004,33(4):343-346.(in Chinese)许秀贞,李自田,薛利军.CCD噪声分析及处理技术[J].红外与激光工程,2004,33(4):343-346.
[10] LIANG Yiping,HE Huawei,XIONG Lingling,et al.A partial-coherence model describing the far-field distribution of laser diode[J].Acta Optica Sinica,2010(8):2180-2184.(in Chinese)梁一平,何华伟,熊玲玲,等.激光二极管远场分布的部分相干模型[J].光学学报,2010(8):2180-2184.
[11] Berthold K P Horn.Robot Vision[M].Beijing:China Youth Publishing,2014.(in Chinese)Berthold K P Horn.机器视觉[M].王亮,蒋欣兰,译.北京:中国青年出版社,2014.
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
现代制造技术与装备(2022年9期)2022-11-02 05:40:16
新世纪智能(数学备考)(2021年10期)2021-12-21 06:20:38
东华大学学报(自然科学版)(2021年4期)2021-09-15 02:54:12
激光与红外(2021年6期)2021-07-23 09:27:32
河北理科教学研究(2020年3期)2021-01-04 01:49:40
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
中学数学杂志(2019年1期)2019-04-03 00:35:46
天津师范大学学报(自然科学版)(2015年2期)2015-03-11 18:46:52
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36
