双圈同轴光纤传感器在润滑油介质中的输出特性
2015-03-21 02:09张小栋董晓妮
中国光学 2015年3期
张 平,张小栋,董晓妮
(1.西安建筑科技大学 机电工程学院,陕西 西安710055
2.西安交通大学 机械工程学院,陕西 西安 710049)
双圈同轴光纤传感器在润滑油介质中的输出特性
张平1*,张小栋2,董晓妮2
(1.西安建筑科技大学 机电工程学院,陕西 西安710055
2.西安交通大学 机械工程学院,陕西 西安 710049)
摘要:针对双圈同轴式光纤(TCCOF)位移传感器用于滑动轴承油膜厚度检测时,由于传播介质为润滑油,传感器输出特性会受到影响,本文根据折射定律分析了传播介质对光纤最大入射角的影响,考虑传播过程中的光损并利用光场的准高斯分布规律建立了润滑油环境下的传感器数学模型,同时通过仿真计算得到了传播介质不同时的传感器输出特性。在此基础上,搭建了相应的传感器标定实验平台进行验证。结果表明:空气中TCCOF传感器的灵敏度为0.691/mm,润滑油中TCCOF传感器的灵敏度为0.464/mm;TCCOF传感器在润滑油测量环境中可减小光功率不同对传感器特性的影响;TCCOF传感器灵敏度随着反射面曲率半径的增大而增大;由于具有对称结构,当反射面为圆柱面时,TCCOF传感器可减小探头周向安装角度对其输出特性的影响。因此,在利用TCCOF传感器进行油膜厚度检测时,必须在相应润滑油环境下及相应的反射面情况下进行传感器标定。
关键词:光纤传感器;同轴;润滑油;输出特性
Output characteristics of sensor with two-circle
coaxial optical fiber in lubricating oil medium
1引言
强度调制式光纤传感器由于具有体积小、结构简单、非接触测量、抗电磁干扰能力强等优点,在工业应用领域得到广泛应用,如薄膜残余应力测量[1]、振动测量[2]、微位移检测[3]、角位移检测[4]、含水量检测[5]等。
反射强度调制式光纤位移传感器最早由W.E.Frank[6]和C.D.Kissinger[7]提出。之后,R.O.Cook和C.W.Hamm提出一种由7根光纤组成的反射式位移传感器,研究了该传感器参数对其输出特性影响,并将该传感器用于冲击量的检测[8]。针对单接收光纤接收光功率容易受到光源功率变化以及反射面反射率的影响,H.Allen[9]、L.Yuan[10]、Y.Chen[11]等人提出具有补偿功能的光纤位移传感器结构并对其特性进行了详细研究;在此基础上,肖韶荣[12]、Y.Guo[13]等人利用基于神经网络的数据融合方法,提高光纤位移传感器的测量范围,减小其测量不确定性。
由于双圈同轴式光纤(TCCOF)传感器的良好补偿特性[14],可将其用于圆轴承润滑膜厚度测量。然而上述研究都未涉及反射式光纤位移传感器应用于非空气环境中的位移测量,未研究传播介质对传感器输出特性的影响。事实上,传播介质折射率会影响发射光纤至反射体的入射光范围;同时,由于传播介质的影响,会有一部分光在光纤探头与传播介质的交界面反射,影响入射功率和耦合功率,并最终影响油膜厚度测量结果。本文在分析TCCOF传感器工作原理的基础上,建立润滑油介质环境下TCCOF传感器模型,分析传播介质对传感器输出特性的影响,搭建相应的标定实验台并进行相应的实验予以验证;同时实验研究反射面形状、光源光功率的波动、传感器探头沿周向安装方向对传感器输出特性的影响。
2润滑油环境下TCCOF传感器模型
2.1 光纤排列结构
TCCOF传感器的光纤排列方式[14]如图1所示,它由19根光纤组成。发射光纤(TF)根数为1根,置于光纤束的中心;内圈接收光纤束(IFG)由6根光纤组成,称为第一组接收光纤(RF1);外圈接收光纤束(OFG)的12根光纤根据距发射光纤中心距的不同分为两组,分别称为第二组接收光纤(RF2)和第三组接收光纤(RF3)。对称紧密布置的光纤布置方式可减小光纤探头外径尺寸和测量死区。
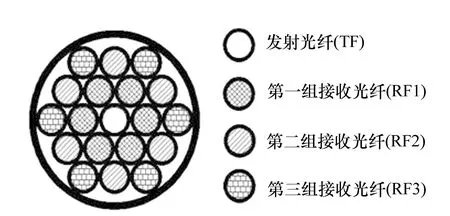
图1 双圈同轴式光纤排列结构 Fig.1 TCCOF arrangement
2.2 润滑油折射率对光路传播的影响
当从发射光纤发出的光线在折射率为n1的介质中传播时,发射光纤发出光的出射角会发生变化,同时耦合到接收光纤的光线入射角也会发生变化。根据折射定律,有如下等式:
(1)
式中:NA为光纤数值孔径;n0为空气折射率(n0=1);θc0为空气传播介质时的光纤最大入射角;θc1为润滑油传播介质时的光纤最大入射角。
因为n1>1,则可知θc1<θc0。因此,光纤的最大入射角受到传播介质折射率的影响,关系如图2所示。通过式(1)可知,提高光纤的数值孔径可提高润滑油介质中光纤的最大入射角。

图2 光纤最大入射角随传播介质折射率变化关系 Fig.2 Relation between the maximum incidence angle of fiber and refractivity of propagating medium
2.3 TCCOF传感器模型
TF出射光场的光强分布有以下几种假设:均匀分布、圆台型分布、钟形分布、高斯分布及准高斯分布,其中准高斯分布被认为与实际情况比较符合的一种光场分布规律[10]。当光线在润滑油中传播时,考虑润滑油折射率、传播介质对光的吸收以及在光线传播交界面部分的光损,根据准高斯分布规律,图3中A点处的光强为[10]:
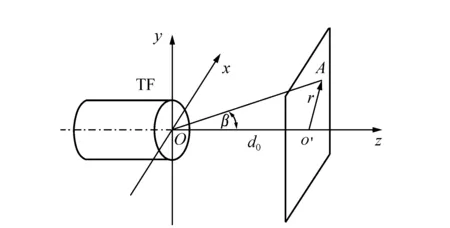
图3 发射光纤出射光示意图 Fig.3 Emergent light sketch of transmitting fiber
(2)
式中:φ(r,d0)为纤端光场中位置(r,d0)处的光通量密度;I0为光源耦合到发射光纤中的光强;σ表征光纤折射率分布的相关参数(对于阶跃折射率光纤,σ=1);r0为光纤纤芯半径;ξ为调和参数;θc1为润滑油介质中光纤最大入射角;ζ为传播介质造成的光强损失率。
对于芯径比较大的多模光纤且接收光纤和发送光纤为同一种光纤时,在光纤探头端面处,可用接收光纤中心点处的光强作为整个接收光纤端面处的平均光强,所以在纤端光场中位置(r,d0)接收到的光功率为:
(3)
将两组接收光纤接收到的光强进行比值处理,可以得到TCCOF传感器的输出特性调制函数的计算公式,即:
(4)
式中:M(z)为两组接收光纤束光强的比值;Ir1为IFG接收的光功率;Ir2为OFG接收的光功率;I2i为RF2的第i根光纤接收光功率;I3i为RF3的第i根光纤接收光功率;I1i为RF1的第i根光纤接收的光功率。
将式(3)代入式(4)中可得:
(5)
式中:r1为RF1中心距TF中心的距离;r2为RF2中心距TF中心的距离;r3为RF3中心距TF中心的距离。
通过式(5)可知,在润滑油介质中,当传感器的光纤结构参数即发射光纤和接收光纤的轴间距r、纤芯半径r0、光纤的最大入射角θc1一定时,光纤输出特性仅与传感器探头端面到反射面之间的距离z有关,而与激光光源强度、反射面的反射率、光纤的本征损耗和由弯曲所带来的附加损耗等因素无关。因此,采用双圈同轴式的光纤布置方式,通过对内外两圈接收光纤接收光功率的比值处理可实现接收光纤的光强补偿。
3输出特性仿真
当光纤传感器探头在润滑油中,光纤的数值孔径为0.22,光纤的纤芯半径为96 μm,光纤的包层厚度为4 μm,接收光纤与发射光纤紧密排列(如图1)。取空气的折射率为1、润滑油的折射率为1.48。根据式(1)和式(5),通过Matlab编程仿真计算可得传感器在空气中和润滑油中时的输出特性曲线,见图4。
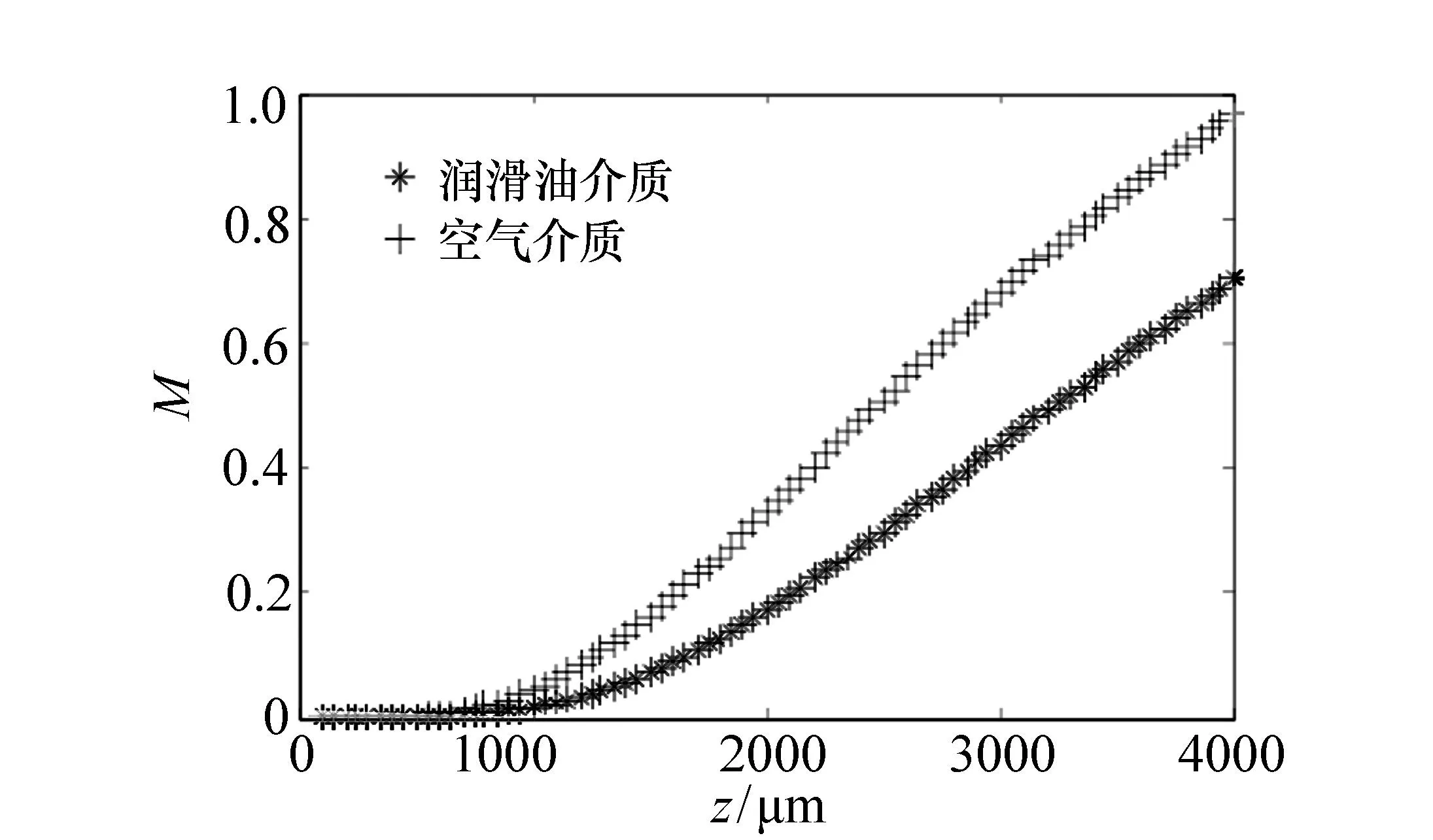
图4 在不同介质中时TCCOF传感器输出特性 Fig.4 Output characteristic of the TCCOF sensor in different medium
从图4可知,在忽略不同介质交界面反射率以及反射面反射率的基础上,与光纤传感器在空气介质中输出特性相比较,光线在折射率大于1的润滑油介质中传播时,受到传播介质折射率的影响,双圈同轴式光纤传感器灵敏度减小,同时测量死区在增大。因此根据式(1),在折射率大于1的传播介质环境下,设计光纤传感器时选择数值孔径较大的光纤可提高光纤最大入射角、传感器测量的灵敏度,减小测量死区。
4TCCOF传感器测量系统设计
如图5所示,TCCOF传感器测量系统包括激光光源、光纤传感器、信号调理部分、数据采集部分以及上位机。调理部分主要包括:电源模块、光电转换模块、放大模块以及滤波模块。
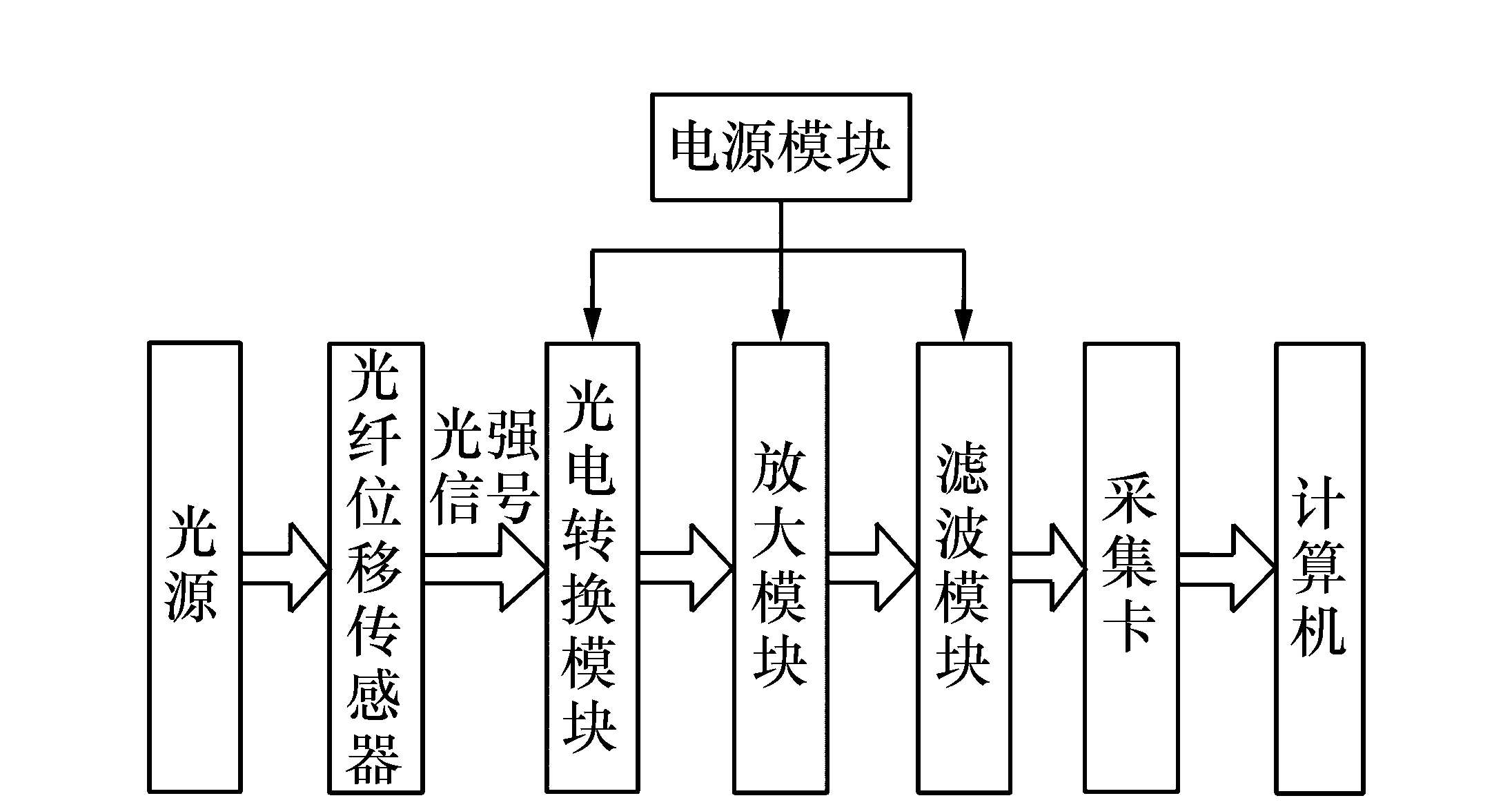
图5 TCCOF传感器检测系统模块 Fig.5 Measuring system model of TCCOF sensor
TCCOF传感器的探头前端接收从反射面反射的光信号,然后通过接收光纤将光信号送至采用OPT101芯片的光电转换模块进行光电转换,得到与光功率成一定关系的电压信号。由于该电压信号为毫伏级信号,再通过放大电路将该电压信号进行放大处理以满足采集卡的量程范围。为了避免外界噪声等干扰,使用低通滤波器进行滤波处理,之后将滤波处理后的信号传送到数据采集器上进行数据采集。同时,将采集到的接收光纤的外圈和内圈电压信号进行比值处理,得到TCCOF传感器的比值输出。实验选择波长650 nm的半导体激光源,采用CBOOK2000高精度数据采集器。
5TCCOF传感器特性实验
5.1 实验平台搭建
实验采用TCCOF传感器的光纤排列方式,如图2所示,光纤为多模石英光纤,纤芯半径为96 μm,数值孔径为0.22,包层厚度为4 μm。
整个实验在图6所示的实验装置上完成。实验装置包括电动位移平台、TCCOF传感器、调理电路、数据采集器、上位机、反射体、油槽。位移平台可垂直上下移动,最小分辨率为1 μm,由专门的运动控制器控制。
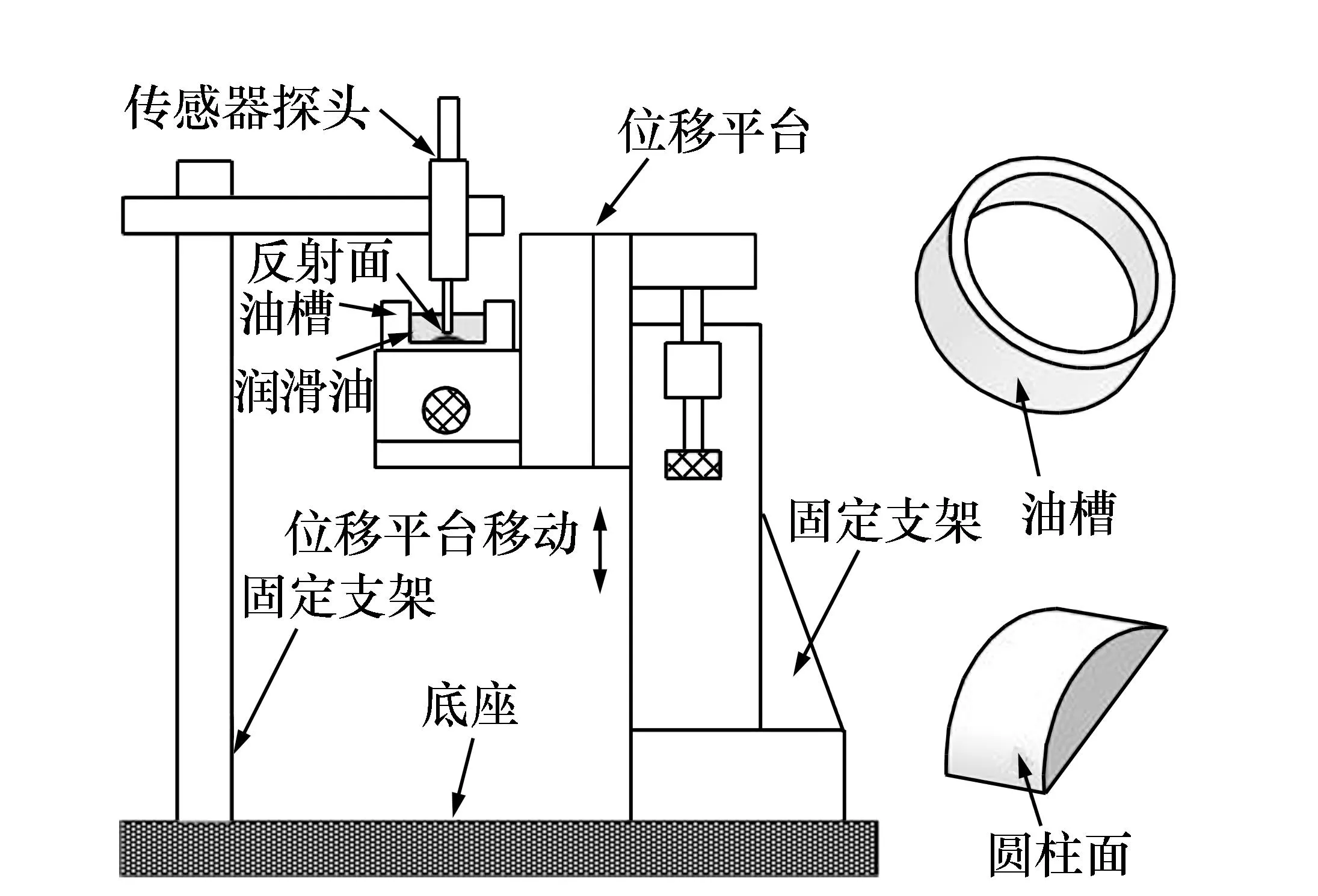
图6 TCCOF传感器特性实验台 Fig.6 Characteristic experiment rig of TCCOF sensor
反射面有两种:平面(油槽底部内表面)和半径15 mm圆柱面,粗糙度均为Ra1.6。实验时,在油槽中加注润滑油,模拟润滑油环境;圆柱面可放入油槽中,模拟轴颈表面,其中润滑油的折射率为1.48。位移平台每移动50 μm,记录一组数据,即IFG和OFG接收光分别经调理转换后的电压,并在上位机中根据式(4)完成相应的比值处理。
5.2 实验结果
图7(a)、(b)、(c)分别为光线在空气中及润滑油中传播、反射面为平面、平面粗糙度为Ra1.6时,发射光纤光功率为20 mW的情况下,TOOCF传感器的内圈光纤输出特性曲线、外圈光纤输出特性曲线和比值输出的特性曲线。
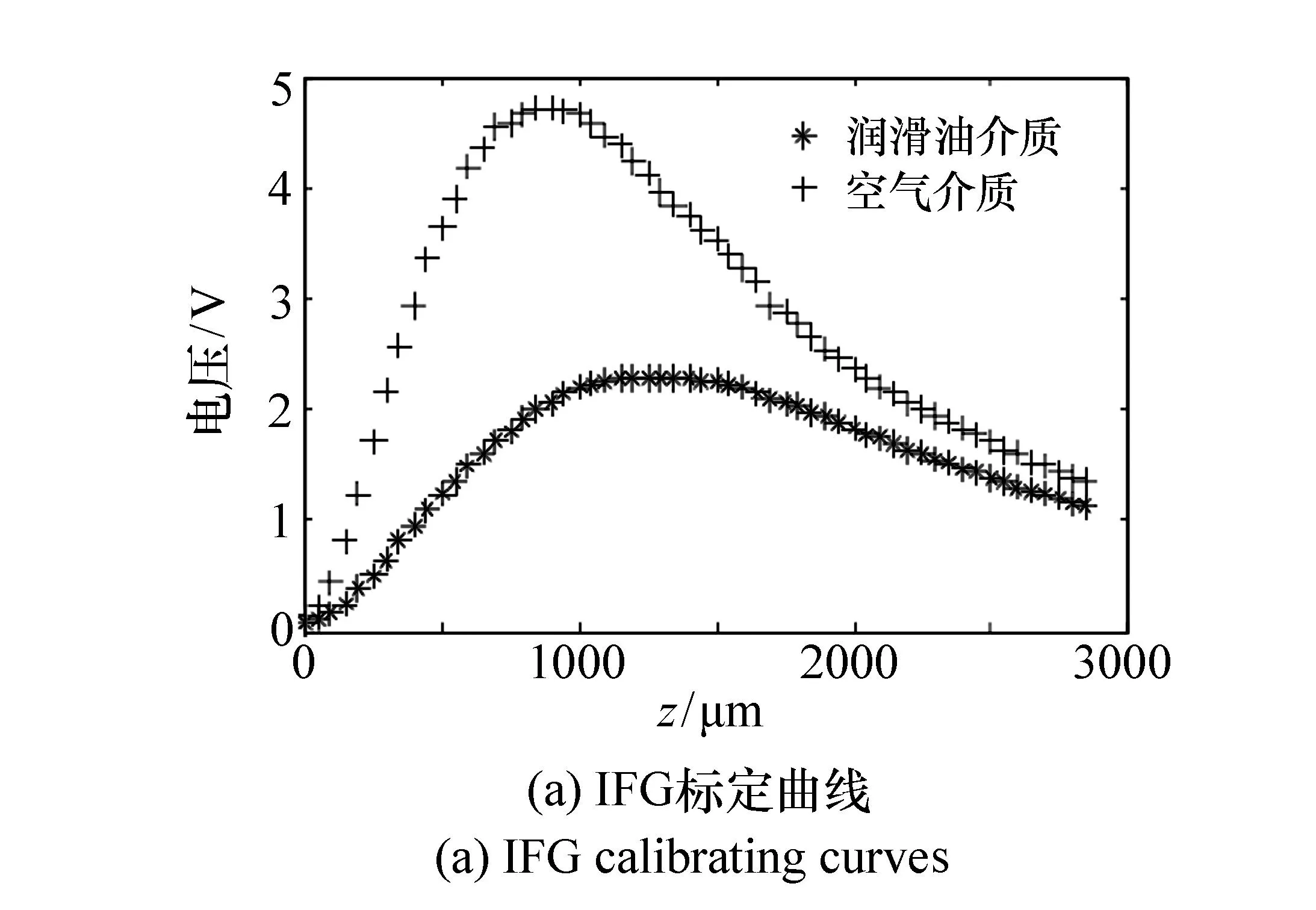
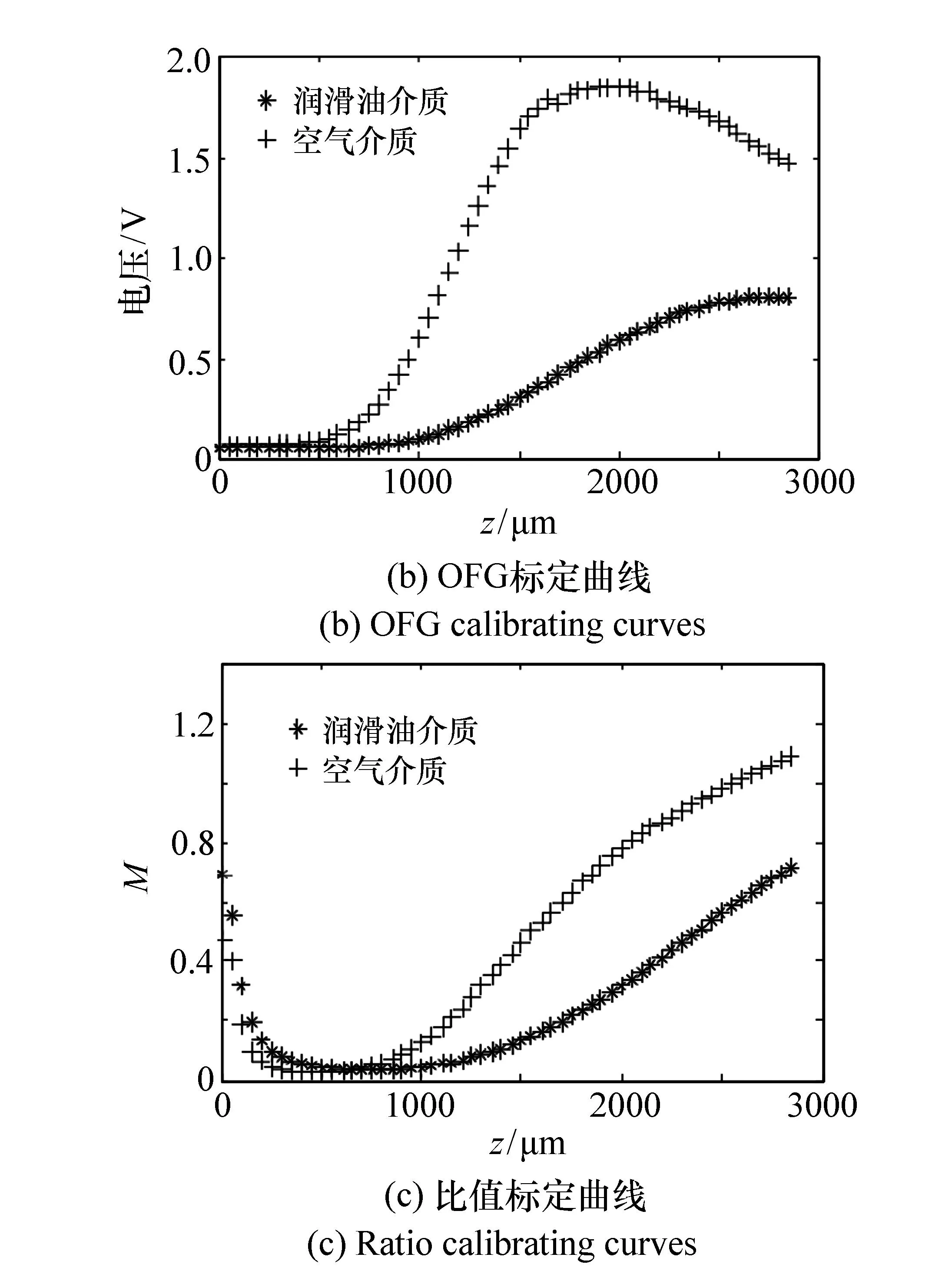
图7 反射面为平面、不同传播介质时的传感器输出特性 Fig.7 Output characteristics of sensor in different medium when surface is plane
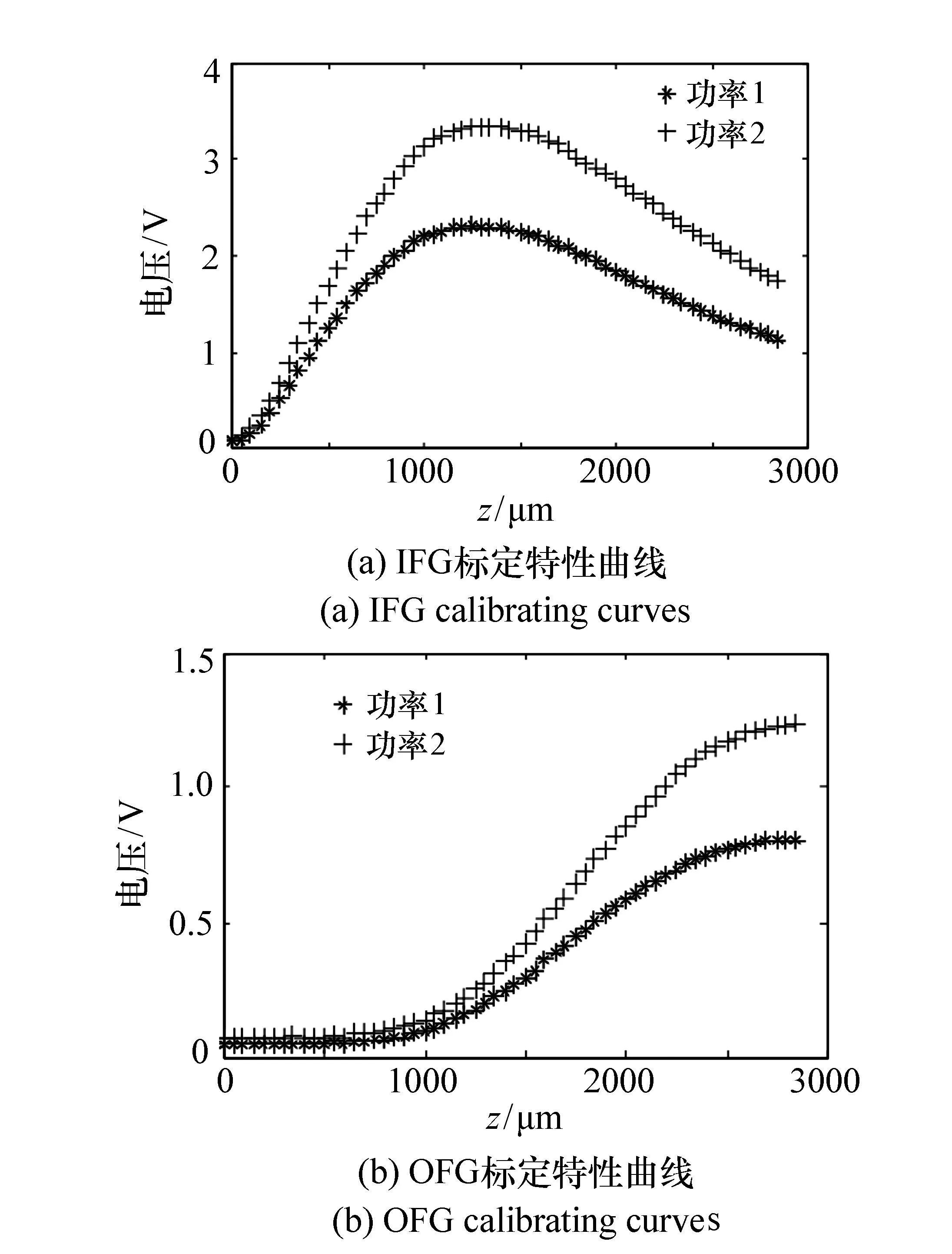
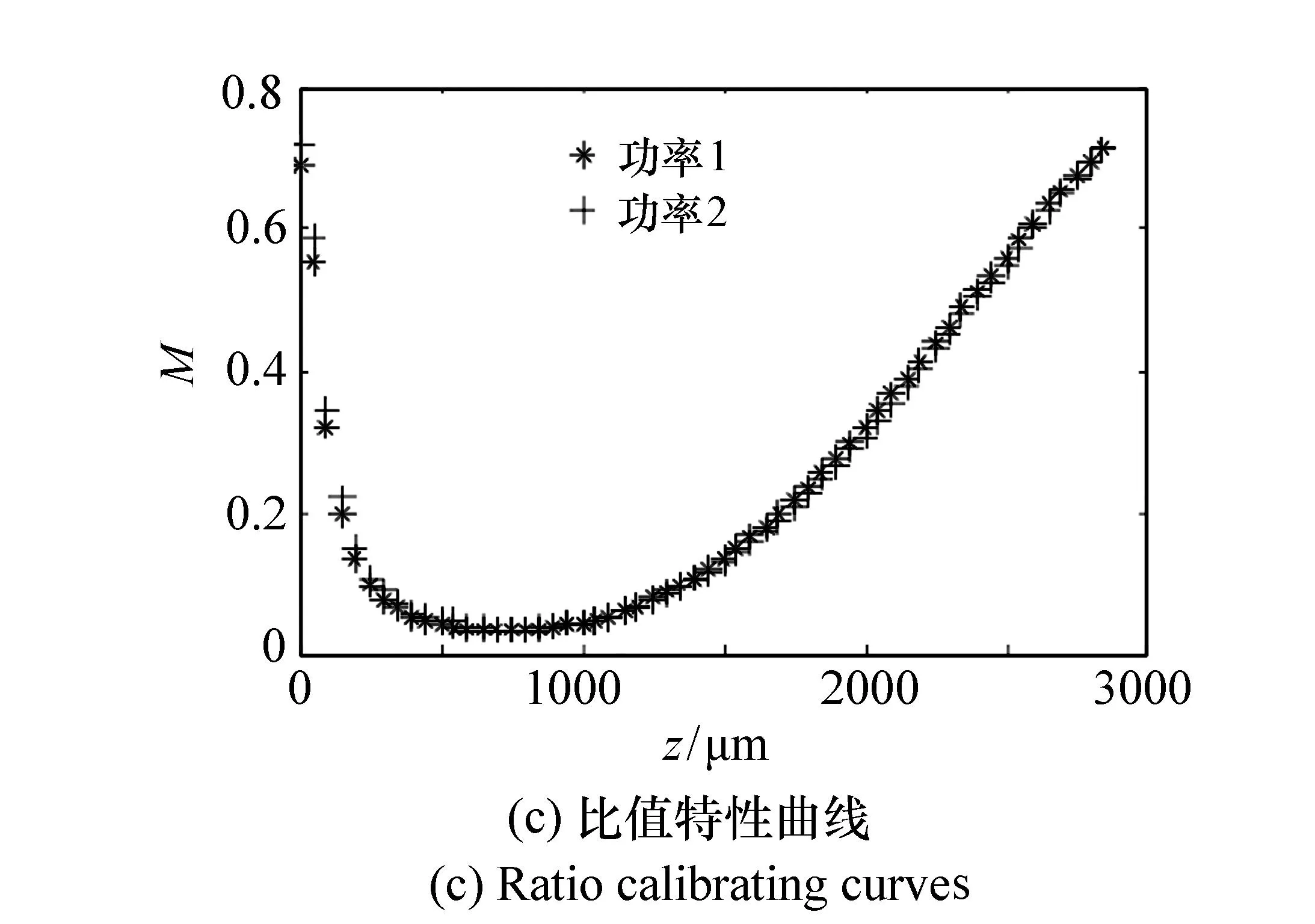
图8 反射面为平面、光功率不同时的传感器输出特性 Fig.8 Output characteristics of sensor for different light source power and plane surface
图8(a)、(b)、(c)分别为光线在润滑油中传播、反射面为平面、发射光纤光功率分别为20 mW(功率1)和30 mW(功率2)时TOOCF传感器的内圈光纤输出特性曲线、外圈光纤输出特性曲线和比值输出的特性曲线。
图9为光线在润滑油中传播,反射面分别为平面、半径为15 mm的圆柱面时,TCCOF传感器的比值输出特性曲线。
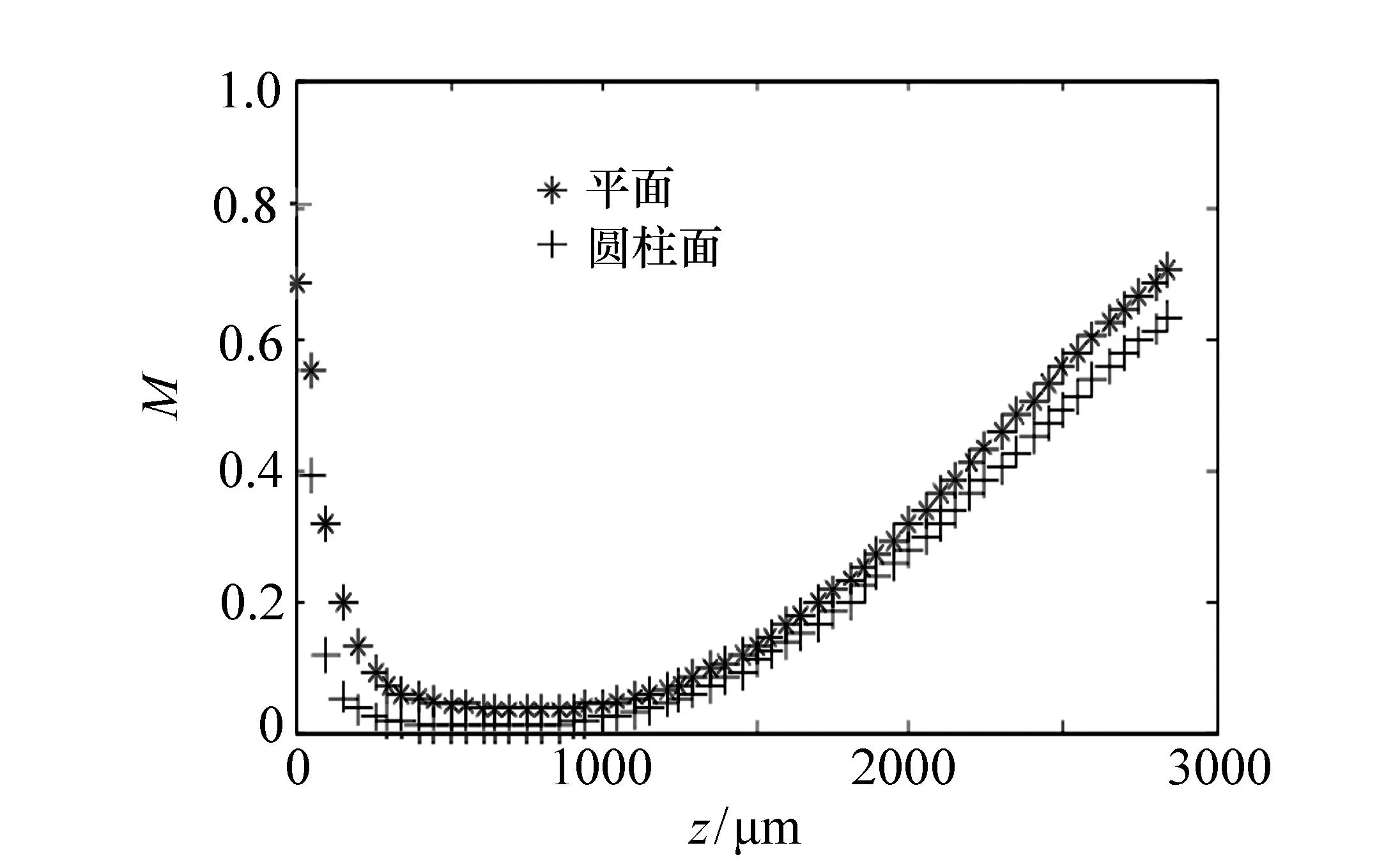
图9 反射面形状不同时的传感器输出特性 Fig.9 Output characteristics of sensor when the shape of reflector is different
图10为光线在润滑油中传播、反射面为半径15 mm的圆柱面时,传感器探头安装方向旋转90°前后TCCOF传感器的比值输出特性曲线。
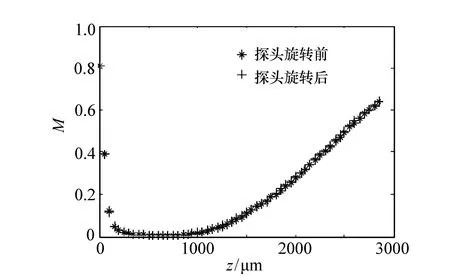
图10 探头周向安装位置不同时的传感器输出特性 Fig.10 Output characteristics of sensor when fixing angle around the probe axis is different
5.3 讨 论
从图7(a)和(b)可以看出,反射面为平面、传播介质为润滑油时,由于交接界面的反射及传播介质的吸收,在相同距离的情况下,内圈和外圈的接收光经光电转换后的电压值小于光线在空气中传播时的电压值。如果取传感器的输出特性曲线的线性范围为1 800~2 800 μm,则在润滑油中其灵敏度为0.464/mm。传播介质为空气时,如果取传感器的输出特性曲线的线性范围为1 100~1 900 μm,则其灵敏度为0.691/mm。从而可知,传播介质为润滑油时,比值特性曲线的灵敏度相对于在空气中传播时的特性曲线会降低,与图4仿真曲线相符。
从图8(a)和(b)可以看出,反射面为平面、传播介质为润滑油,发射光纤光功率为20 mW时,在1 250 μm处内圈接收光纤束接收光转换成电压为2.30 V,在2 850 μm处外圈接收光纤束接收光转换成电压为0.81 V;当发射光纤光功率为30 mW时,在1 250 μm处内圈接收光纤束接收光转换成电压为3.30 V,在2 850 μm处外圈接收光纤束接收光转换成电压为1.23 V。由此可知,同位移下,入射光功率较大时,其接收光纤接收到的光功率也较大。从图8(c)可知,由于TCCOF传感器的补偿特性,虽然入射光功率不同,但其比值特性曲线的重合度较好。
从图9可以看出,传播介质为润滑油,反射面为平面时传感器灵敏度为0.464/mm,反射面为半径15 mm圆柱面时传感器灵敏度为0.426/mm。因此,反射面形状发生变化,需对传感器进行重新标定。
从图10可以看出,如果取传感器的输出特性曲线的线性范围为1 800~2 800 μm,则传感器探头旋转前后传感器的灵敏度分别为0.426/mm和0.423/mm,可见探头周向安装方向对传感器输出特性影响很小,这主要是由于双圈同轴式光纤布置具有对称结构。
6结论
(1)利用准高斯分布的光场分布规律建立了具有补偿特性的TOOCF传感器在润滑油介质中的调制函数数学模型,并分析了传播介质对传感器特性的影响,结果表明,传播介质不同,传感器的输出特性不同;
(2)传播介质为润滑油,取TOOCF传感器输出特性曲线的线性范围为1 800~2 800 μm,则传感器灵敏度为0.464/mm;传播介质为空气,取传感器的输出特性曲线的线性范围为1 100~1 900 μm,则其灵敏度为0.691/mm;随着介质折射率的增大,传感器灵敏度减小,结果与理论仿真计算相符;
(3)理论和实验结果都表明该传感器可消除光功率波动对传感器输出特性的影响;
(4)当反射面形状不同时,传感器的输出特性会发生变化,当反射面有曲率半径时,传感器的灵敏度会下降;
(5)由于具有对称结构,当反射面为圆柱面时,TCCOF传感器可减小探头周向安装角度对其输出特性的影响;
(6)TCCOF传感器用于油膜厚度检测时,需在相应的环境下对传感器进行标定。
参考文献:
[1]CHOWDHURY S,LAUGIER M. Thin film stress measurement by instrumented optical fibre displacement sensor[J].AppliedSurfaceScience,2007,253(9):4289-4294.
[2]金远强,刘丽华,马惠萍,等.用于高速转轴径向振动检测的光纤传感技术[J].光学 精密工程,2007,15 (1):95-99.
JIN Y Q,LIU L H,MA H P,etal.. Fiber sensor used in detecting radial vibration of high rotating speed shaft[J].Opt.PrecisionEng.,2007,15 (1):95-99.(in Chinese)
[4]SHAN M,MIN R,ZHONG Z,etal.. Differential reflective fiber-optic angular displacement sensor[J].Optics&LaserTechnology,2015,68:124-128.
[5]易亨瑜,齐予,尚永福,等.原油含水率测量的光学计量仪[J].光学与光电技术,2013,11(2):67-70.
YI H Y,QI Y,SHANG Y F,etal.. Measurement system for water holdup in crude oil using optical sensors[J].Optics&OptoelectronicTechnology,2013,11(2):67-70.(in Chinese)
[6]FEANK W. Detection and measurement device having a small flexible fiber transmission line:U.S.,US3273447[P],1966.
[7]KISSINGER C. Fiber optic proximity probe:U.S.,US 3327584[P],1967.
[8]COOK R,HAMM C,AKAY A. Shock measurement with non-contacting fiber optic levers[J].J.SoundandVibration,1981,76(3):443-456.
[9]HULL A G. Reflectivity compensation and linearization of fiber optic proximity probe response[J].SPIE,1984,518:81-90.
[10]YUAN L B,PAN J,YANG T,etal.. Analysis of the compensation mechanism of a fiber-optic displacement sensor[J].SensorsandActuatorsA:Physical,1993,36(3):177-182.
[11]YANG C,OYADIJI S O. Theoretical and experimental study of self-reference intensity-modulated plastic fibre optic linear array displacement sensor[J].SensorsandActuatorsA:Physical,2015,222:67-79.
[12]肖韶荣,张周财,黄新.基于数据融合的多通道光纤位移传感器[J].光学 精密工程,2013,21(11):2764-2770.
XIAO SH R,ZHANG ZH C,HUANG X. Multi-channel fiber-optic displacement sensor based on data fusion[J].Opt.PrecisionEng.,2013,21(11):2764-2770.(in Chinese)
[13]GUO Y,WANG Y,JIN M. Improvement of measurement range of optical fiber displacement sensor based on neutral network[J].InternationalJ.LightandElectronOptics,2014,125(1):126-129.
[14]刘丽华,车仁生,李建新,等.三层反射式同轴光纤束位移传感器设计[J].光学 精密工程,2005,13(z1):25-29.
LIU L H,CHE R SH,LI J X,etal.. Design of reflective fiber displacement sensor with three-layer coaxial fiber bundle[J].Opt.PrecisionEng.,2005,13(z1):25-29.(in Chinese)
张 平(1980—),男,山西河津人,博士,讲师,2013年于西安交通大学获得博士学位,主要从事光纤检测技术、机械故障诊断方面的研究。E-mail:zp_80@163.com

张小栋(1967—),男,陕西周至人,博士,教授,博士生导师,主要从事光纤精密检测技术、机械状态监测与故障诊断技术、智能机器人技术方面的研究。E-mail:xdzhang@mail.xjtu.edu.cn

董晓妮(1976—),女,山西芮城人,博士研究生,主要从事机械状态监测与故障诊断技术方面的研究。E-mail:birdy_dong@163.com
ZHANG Ping1*, ZHANG Xiao-dong2, DONG xiao-ni2
(1.SchoolofMechanicalandElectricalEngineering,Xi′anUniversityof
ArchitectureandTechnology,Xi'an710055,China
2.SchoolofMechanicalEngineering,Xi'anJiaotongUniversity,Xi′an710049,China)
Abstract:The output characteristics of sensor with two-circle coaxial optical fiber(TCCOF) are affected by the lubricating oil when the optical fiber sensor is adopted to measure the thickness of lubricating film. The effect of propagating medium on the maximum incidence angle of fiber is analyzed basing on the refraction law. The mathematical model of sensor in the lubricating oil environment is built taking into account the light loss and adopting the light intensity quasi-Gaussian distributing law. Meanwhile the output characteristics of sensor in the different propagating medium are gained by the simulating calculation of the model. Based on that the calibration experiment rig is built to verify the simulating output characteristics of sensor. The results indicate that the sensibility of TCCOF sensor are 0.691/mm in the air and 0.464/mm in the lubricating oil, respectively; the TCCOF sensor can eliminate the effect of changing optical power; the sensibility of TCCOF sensor increases with the increase of reflector curvature radius; the symmetrical structure of TCCOF sensor can decrease the effect of the different peripheral installing direction on the output of optical fiber sensor. Therefore, the TCCOF sensor must be calibrated in the corresponding lubricating oil and reflector environment.
Key words:optical fiber sensor;coaxial;lubricating oil;output characteristic
作者简介:
*Corresponding author, E-mail:zp_80@163.com
中图分类号:TN253
文献标识码:A
doi:10.3788/CO.20150803.0439
文章编号2095-1531(2015)03-0439-08
基金项目:国家自然科学基金资助项目(No.51405366)
收稿日期:2014-11-16;
修订日期:2015-02-13
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
内燃机工程(2021年6期)2021-12-10
家庭影院技术(2021年3期)2021-05-21
石油商技(2021年1期)2021-03-29
家庭影院技术(2020年1期)2020-06-24
数字技术与应用(2017年6期)2017-09-08
科技创新与应用(2017年1期)2017-05-11
风能(2016年12期)2016-02-25
现代电子技术(2014年10期)2014-07-19
汽车维修与保养(2014年12期)2014-04-18