
后向散射式小型激光雷达能见度仪探测研究
2015-03-18 03:07:52庄子波蒋立辉
激光技术 2015年1期
庄子波,黄 炜,符 超,蒋立辉
(1.中国民航大学民航气象研究所,天津300300;2.中国民航大学飞行技术学院,天津300300;3.中国民航大学天津市智能信号与图像处理重点实验室,天津300300)
引 言
随着我国经济的快速增长,各地机场建设如雨后春笋般迅猛发展,在航空领域,能见度对于空中交通安全有着重大的影响,越发受到人们的重视。2010-08-24,一架客机在黑龙江伊春机场降落时失事,客机上96人中42人遇难、54人受伤,事后调查原因系能见度太低,飞行员无反应时间导致惨剧的发生。在不良能见度天气条件下,采取相应的管制措施能够有效地减少恶性事故的发生,保证空中交通的安全。
能见度设备方面,美国、德国和芬兰在这一领域一直处于领先地位,国内仅有少数科研机构完成了样机的研制,且目前的能见度仪多采用透射式和前向散射式,其体积较大、安装过程复杂,只能获取水平方向能见度。在出现不均匀的雾、局部的雨或雪暴的情况下,仪器的读数极易出现误差。同时由于其测量采样空间小,测量结果只能反映小区域能见度信息,对雾团等严重影响交通安全的天气现象无法做出准确、及时的反映。可以看出,进行能见度测量设备的研制具有重大的现实意义,且能够大力推进民航设备的国产化进程,实现我国从民航大国到民航强国的转变。
本文中基于嵌入式计算机设计了一台激光雷达能见度仪探测大气,首先选用PCM-3370E作为系统集成解决方案,实现了系统轻小化设计和数据处理。其次利用激光探测的优点,可有效获得整个探测路径的能见度信息,填补了传统能见度仪点监视的盲区。本系统不仅能测量水平能见度,还能测量斜程能见度,同时通过后期改变探测方向和算法,还可获得云层高度信息。且激光雷达具有高时空分辨率和大测量范围等特点,能够准确预报雾团等严重威胁交通安全的环境特征,可广泛应用于机场气象监测、空中交通安全预警及大气科学研究领域。
1 系统测量原理
激光雷达探测的基本原理为:首先探测激光由激光器发出,在探测路径上与大气分子和气溶胶粒子等介质相互作用,被大气中的粒子散射,后向散射的激光在返回的路程中再次被大气消光衰减,然后回波信号由接收机接收,最后通过数据处理计算相应的消光系数并得到此时的能见度。根据Koschmieder定律,能见度方程为:

式中,V为能见度,σ为白光大气消光系数,ε为视觉感应阈值,即人眼能够将目标从背景中分辨出来的最小亮度对比,航空领域国际民航组织(International Civil Aviation Organization,ICAO)推荐取 ε=0.05。
由于本设备采用532nm波长探测激光,考虑到白光与探测激光传输上的差别,对(1)式进行修正,得到小于6km能见度时的能见度方程[1]为:

式中,σλ为使用532nm激光探测大气时的消光系数。
2 系统概述及控制实现
2.1 系统概述
系统采用收发分置离轴结构,如图1所示,主要由三部分组成:激光发射单元、接收光学单元、信号采集和控制单元。系统采用模块化和轻小全固化结构,体积小巧、结构紧凑、轻便稳定,系统整体封装于210mm×170mm×140mm的铝结构框架中。

Fig.1 Structure of the system

Fig.2 Circuit of the system
系统电路结构如图2所示,在光学设计方面,激光器采用二极管抽运固体激光器(diode pumped solid-state laser,DPSSL),该激光器具有低脉冲能量和高脉冲重复频率的特点,既满足了人眼安全的标准,又能保证单位时间脉冲积累的数目,提供了足够的平均发射功率[2]。光束耦合器将激光器发射的激光束转换为光纤中的光波,用来聚焦和准直激光的发射光束,降低激光发射过程中的能量损耗。本设计中采用了一对口径均为50mm的发射/接收望远镜,望远镜由锥形镜筒及后续的平面镜、组合透镜组成,最后通过光纤和光束耦合器与雪崩光电二极管(avalanche photo diode,APD)探测器相连,用于发射和接收激光信号。同时,通过约束发射/接收视场角,以提高探测激光的能量利用率,并且保证发射视场角略小于接收视场角。系统工作状态下发射望远镜将激光汇聚成平行光束,发射至探测空间。接收望远镜由一组组合透镜构成,接收与大气相互作用后散射回的激光雷达回波信号。窄带滤光片位于透镜组的最前端,以滤除工作波长带外的背景光和杂散光。回波信号最终被汇聚到接收光纤,输送到光电探测器。
在电学设计方面,采用了模块化的设计思想。针对激光雷达回波信号相对微弱[3]的特点,此处选用低噪声、高量子效率,可实现单光子探测的雪崩光电二极管探测器SPCM-AQRH-10实现光信号至电信号的转换,然后由同轴电缆接口(bayonet nut connector,BNC)将电信号发送至光子计数卡。光子计数卡完成数据的采集,此处选用具有多通道和高采集速率的MCS-pci,保证了对光电探测器输出的有效采集[4]。系统主要技术参量如表1所示。
经过随访以及引产结果,证实了90名孕妇中,存在34例出现中枢神经系统畸形胎儿,其中有4例无脑儿,5例脑膨出,2例露脑畸形,4例全前脑,1例颈部水囊瘤,10例脑积水,8例脑室扩张;对照组孕妇中,其中有27例检查结果一致,检查的确诊率为79.41%;观察组孕妇中,其中有33例检查结果一致,检查确诊率为97.06%;对比两组孕妇的确诊率,观察组孕妇的检查正确率高于对照组孕妇,数据差异具有可比性(P<0.05)。
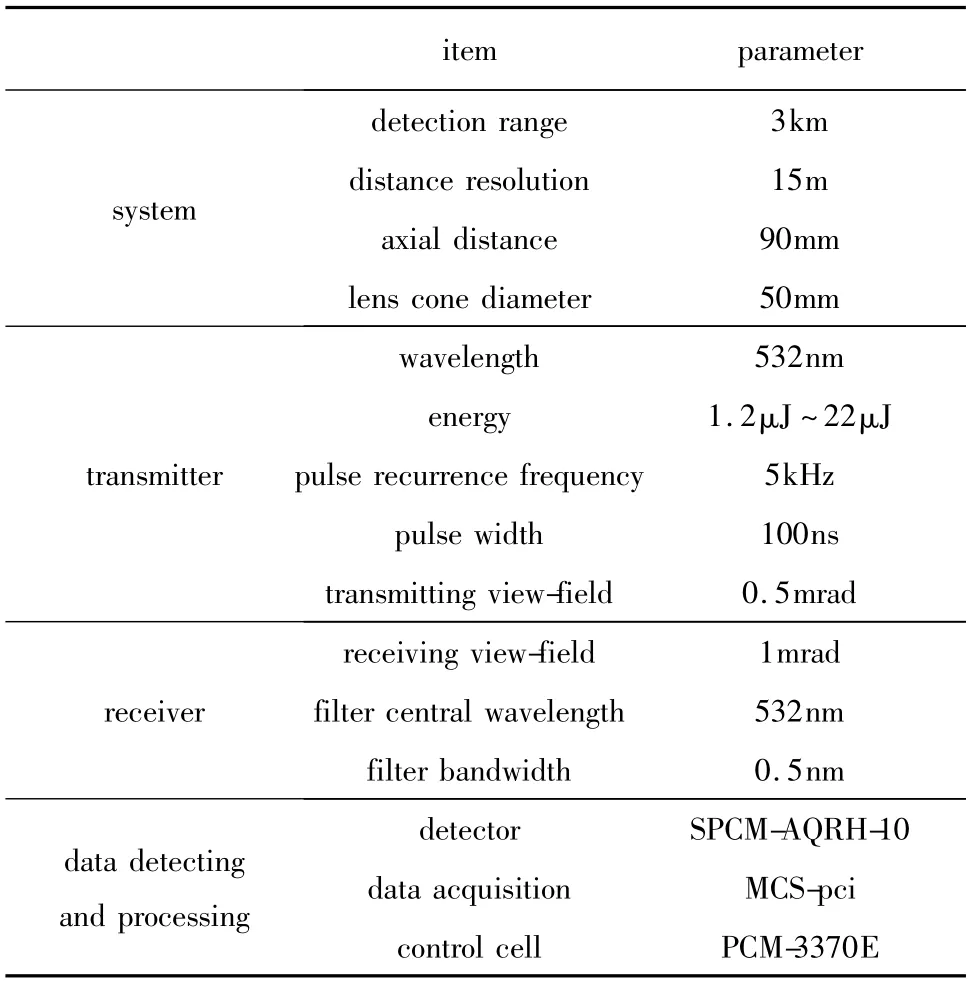
Table 1 Parameters of the lidar visibility system
值得一提的是,本系统的数据存储、处理和控制由嵌入式计算机完成[5-6]。考虑到整个激光雷达能见度测量系统的便携性和数据处理性能要求,选用基于PC/104总线的研华PCM-3370E作为系统集成解决方案。在尺寸上,该板卡规格为96mm×115mm,满足系统结构轻小化要求。在性能上,该嵌入式计算机采用Intel Celeron 400MHz处理器,512M内存,板卡支持RS-232和RS-485接口、通用串行总线(universal serial bus,USB)控制芯片及接口和10M/100M以太网接口,配有4G的小型快闪(compact flash,CF)卡,数据处理能力完全满足系统的实际应用要求。光子计数卡可以通过转接模块与该板卡的120针基于外设互联设备(peripheral computer interconnect,PCI)总线的堆栈式插座相连接。除此之外,该板卡集成的有线网口还可以实现仪器的远程控制,实现多种测量设备的组网和统一控制。图3为PCM-3370E的内部结构框图。
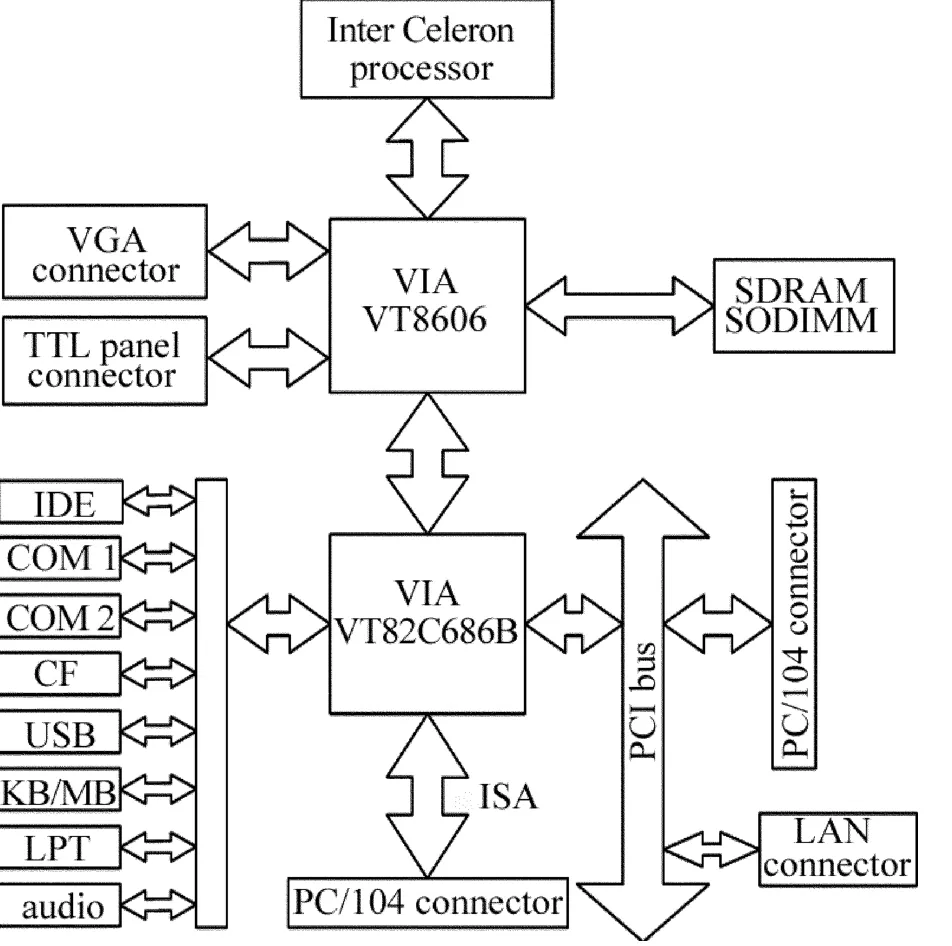
Fig.3 Internal structure of PCM-3370E
在数据处理方面,本系统采用了一种基于Fernald后向积分法的大气消光系数迭代算法来测量斜程及水平方向的大气平均能见度值[7]。该算法克服了以往算法中由于消光系数初值的不确定,从而导致结果不稳定的现象,通过控制迭代精度,经过有限次迭代可以得到稳定的输出结果,为激光雷达能见度系统测量结果的可靠性提供了算法的保障。
2.2 系统控制实现
整个激光雷达能见度测量系统的工作时序由嵌入式计算机控制,控制对象包括激光器、光子计数卡、光电探测器和门控电路。其中激光器通过激光器电源间接控制,光子计数卡和光电探测器通过门控电路进行直接控制。
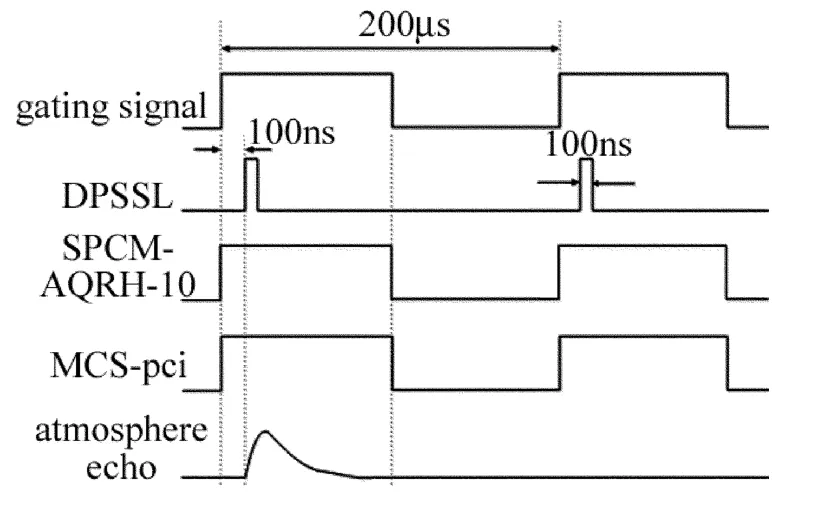
Fig.4 Working sequence of the system
如图4所示,系统开始工作时,PCM-3370E从串行通信接口(RS232)发送触发信号至激光器电源,激光器开始工作。同时激光器电源触发门控电路发送延时触发信号至MCS-pci和SPCM-AQRH-10。此处MCS-pci设置的单通道采集时间为100ns,由于激光器的启动存在响应时间,激光束的发射大约滞后触发信号100ns,而MCS-pci和SPCM-AQRH-10的响应时间很短,可以认为接收到触发信号后立即工作,为实现系统的收发同步,故去掉接收到的第1个采样值,从第2个采样值开始数据的采集。
系统处于工作状态时,首先由SPCM-AQRH-10完成信号的探测,将窄带滤光片滤光处理后的激光雷达回波信号进行光电转换,然后由MCS-pci完成信号的采集,并将采集的结果传至嵌入式计算机,最后由PCM-3370E完成数据的处理。
3 外场测试结果及分析
为了测试系统的性能,首先系统进行了特征天气的水平能见度测量实验[8],然后与美国Belford前向散射式能见度仪进行了水平能见度的对比实验,最后采用飞机实测法进行了斜程能见度的对比实验。
图6所示为激光雷达能见度仪在2013-08-13连续24h的水平能见度测量结果[9],并将测试结果与美国Belford前向散射式能见度仪进行对比实验。图中曲线design表示激光雷达能见度系统的测量结果,横坐标表示探测的具体时刻,纵坐标表示该时刻的能见度。

Fig.5 Horizontal return signals under different weather conditions
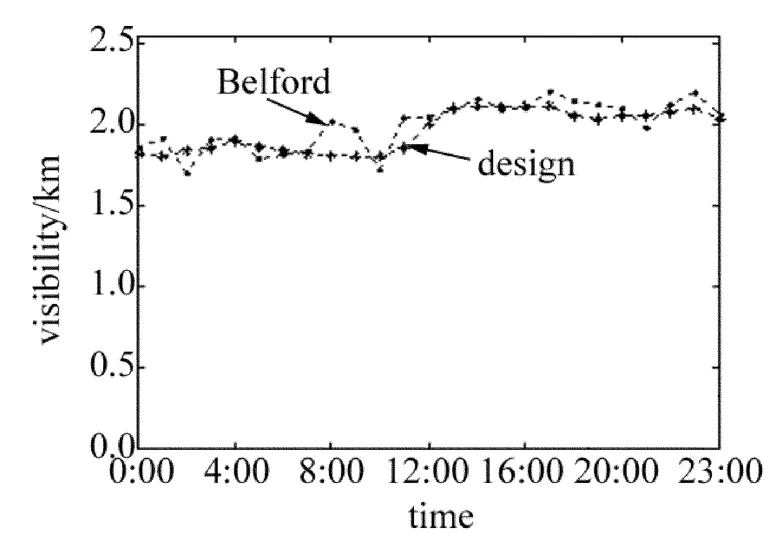
Fig.6 Daylong visibility measurement of the system
从图6中可以看出,当日上午10点左右能见度为1.7km,能见度情况不佳,有轻雾;10点之后雾气消散,能见度情况略微好转,能见度在2.2km左右波动。将本次外场测量结果与美国Belford前向散射式能见度仪进行对比实验,得到两者测量误差在10%以内。经过后续大量的对比实验,如表2所示,统计得到本系统测量总体误差在15%以内,完全符合ICAO对于机场气象测量设备的要求[10]。

Table 2 Horizontal visibility measurement of comparative field tests
虽然两种测量仪器的测量原理不同,但是在测量结果上保持了较高的一致性,这表明本激光雷达能见度仪具有较高的准确性,并且具有良好的全天候工作能力。
另外经过大量的实验发现,本系统在低能见度条件下测量结果要优于高能见度情况,这是因为阴天、雨雾等低能见度天气,大气气溶胶密度较大,使得激光后向散射能量明显增强,信噪比明显提高。由于本系统特别是针对低能见度情况设计的,低能见度天气条件下的测量结果更具有实际意义,适用于机场跑道能见度测量的实际情况。
表3中给出了系统与飞机实测斜程能见度的对比实验结果。对比实验结果表明,本系统在进行斜程能见度测量时具有较高的探测精度,尤其在能见度小于1000m时,测量误差在10%以内,也满足了ICAO对于机场气象测量设备的要求。

Table 3 Slant visibility measurement of comparative field tests
4 结束语
基于后向散射原理,以嵌入式计算机为系统控制和数据处理核心,设计了一台小型激光雷达能见度仪,该系统采用模块化和轻小全固化结构,具有紧凑小巧、稳定轻便等优点。该系统不仅能够测量水平能见度,还可测量斜程能见度,充分满足了机场的应用需求。经过外场测量实验和对比实验,该系统拥有良好的全天候工作能力,且测量误差小于15%,具有较高的测量精度,满足ICAO对于机场气象设备的要求,对于推动国内机场气象设备国产化进程有举足轻重的意义,具有很高的应用前景。
[1] XIONG X L,JIANG L H,FENG Sh.Return signals processing method of Mie scattering lidar[J].Infrared and Laser Engineering,2012,44(1):89-95(in Chinese).
[2] YANG Y K,MARSHAK A,PALM S P,et al.Cloud impact on surface altimetry from a spaceborne 532nm micropulse photoncounting lidar:system modeling for cloudy and clear atmospheres[J].IEEE Transaction on Geoscience and Remote Sensing,2011,49(12):4910-4919.
[3] SHAO Y J,ZHU L Q,GUO Y K,et al.Single photon counting system and its noise analysis[J].Modern Electronics Technique,2013,36(6):167-170.
[4] JIA H,LOU J M,DING Zh Q,et al.Study on the detecting system if single photon counting spectrometer[J].Acta Photonica Sinica,2013,42(1):1-5(in Chinese).
[5] MEI Y H.Design of embedded computer platform in integrity module avionics[J].Computer and Modernization,2013,12(1):188-191(in Chinese).
[6] MEI Y H.Engineering design of embedded computer based on MPC8265[J].Telecommunication Engineering,2012,52(3):375-378(in Chinese).
[7] TIAN F,LUO J,HU D P,et al.Inversion algorithm for slant visibility based on lidar technique[J].Laser & Infrared,2012,42(11):1239-1243(in Chinese).
[8] LI H,SUN X J,SHAN Ch H,et al.Basis theory and observation of meteorological visibility[J].Journal of PLA University of Science and Technology(Natural Science Edition),2013,14(3):297-302(in Chinese).
[9] WANG Y,GENG F H,CHEN Y H,et al.Study of haze with different intensity categories at Pudong District in Shanghai based on micro-pulse lidar[J].China Environmental Science,2013,33(1):21-29(in Chinese).
[10] NAVIGATION SERVICES LIGHTING SYSTEMS OFFICE RVR PRODUCT TEAM.Performance specification PC based runway visual range(RVR)system[S/OL].(2006-08-22)[2014-01-19].http://www.faa.gov/about/office_org/headquarters/ato/service_units/techops/navservices/lsg/rvr/media/FAA-E-2772B.pdf.
猜你喜欢
军事文摘(2024年4期)2024-03-19 09:40:02
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
科学(2020年6期)2020-02-06 09:00:06
Advances in Meteorological Science and Technology(2019年6期)2019-12-30 11:45:42
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
光学精密工程(2016年5期)2016-11-07 09:06:14
中国交通信息化(2016年6期)2016-06-06 07:11:30
工业设计(2016年4期)2016-05-04 04:00:27
