基于VC++的脉冲多普勒雷达解距离模糊模块仿真*
2015-03-15 03:04卢道伟李兴民
舰船电子工程 2015年12期
卢道伟 李兴民
(92941部队93分队 葫芦岛 125000)
基于VC++的脉冲多普勒雷达解距离模糊模块仿真*
卢道伟 李兴民
(92941部队93分队 葫芦岛 125000)
文章阐述了脉冲多普勒雷达解距离模糊的作用和基本原理,说明了解距离模糊的一般流程,在建立脉冲多普勒雷达(PD雷达)仿真系统的实际需求背景下,利用Microsoft Visual C++开发平台,采用余数查找表法对多种PRF解距离模糊模块进行了仿真实现,并对仿真模块进行了验证。
VC++; 脉冲多普勒雷达; PRF; 解距离模糊; 仿真
Class Number TP391.9
1 引言
众所周知,雷达的最大单值测距范围由其脉冲重复周期Tr决定。为保证单值测距,通常应选取

(1)
式中Rmax为被测目标的最大作用距离。
但有时雷达脉冲重复频率(Pulse Repetition Frequency,PRF)的选择不能满足单值测距的要求,例如脉冲多普勒雷达(以下简称PD雷达),这时目标回波对应的距离R为
(2)
式中m为正整数,tR为测得的回波信号与发射脉冲间的时延。这时将产生测距模糊,为了得到目标的真实距离R,必须判明式中的模糊值m[1~3]。
本文在建立PD雷达仿真系统的实际需求背景下,利用Microsoft Visual C++开发平台,采用余数查找表法对多种PRF解距离模糊模块进行仿真实现,并对仿真模块进行验证。
2 多种PRF解距离模糊原理
先讨论用双重高PRF判测距模糊的原理。
设重复频率分别为fr1和fr2,它们都不能满足不模糊测距的要求,但具有公约频率fr[4~5]:
(3)
式中,N和a为正整数,常选a=1,使N和N+a为互质数。fr的选择应保证不模糊测距。
雷达以fr1和fr2的PRF交替发射脉冲信号。通过记忆重合装置,将不同的fr发射信号进行重合,重合后的输出是重复频率fr的脉冲串。同样也可得到重合的接收脉冲串,二者之间的时延代表目标的真实距离如图1所示。

图1 双重高重复频率测距
以二重PRF为例:
(4)
式中,n1和n2分别为用fr1和fr2测距时的模糊数。当a=1时,n1和n2的关系可能有两种,即n1=n2或n1=n2+1,此时可算得
(5)
或
(6)
如果按式(5)算出tR为负值,则应采用式(6)。
如果采用多个高PRF测距,就能给出更大的不模糊距离,同时也可兼顾跳开发射脉冲遮蚀的灵活性。
3 解距离模糊仿真模块的实现
该仿真模块在深入理解多脉冲重频解距离模糊原理的基础上,采用余数查找表法,在多重PRF中选择三重PRF的模糊距离之差来解距离模糊[6~7]。
由前面论述可知,距离模糊是由目标距离大于在某PRF上的不模糊距离引起的。解模糊问题实质上属于数论中的一次同余方程组的求解问题,基于适应性和计算量上的考虑,本仿真模块采用余数查找表法来实现。
余数查找表法是用在各脉冲重复周期PRI(PRF的倒数)上测量得到的目标模糊距离,即目标真实距离用各PRI对应的距离求模后得到的余数,用此余数之差(可为负值)进行解模糊[8~10]。此方法是选择一种PRI的余数作为基准,将其它各PRI上的余数与基准余数之差做成查找表。其原理如图2所示。

图2 余数查找表法原理图
图2所示的是选择四重PRI的情况:以PRIi表示脉冲重复周期,当目标处于某距离单元T时,它在各个PRI上的余数ri可由式(7)计算:
ri=T-Ni·PRIi=Tmod(PRIi)
(7)
式中,i=1,2,3,4,Ni为模糊数,mod(·)表示求模运算。若以第四种重周期作为基准周期,则查找表内存储的表值为
li,k=ri-r4,i=1,2,3
(8)

(9)
(10)
RT=(NkTk+r4)·ΔR
(11)
ΔR为距离分辨率。在采用多重PRF解距离模糊时,系统的最大不模糊距离的确定公式如下:
(12)
式中TG为距离门宽度,C为光速,LCM(m1,m2,…,mi)为m1,m2,…,mi的最小公倍数,m1,m2,…,mi为在各重PRF上的距离门个数,i为解距离模糊采用的PRF重数。
根据PD雷达仿真系统课题的需求,在MPRF模式下,雷达的最大作用距离为120km,距离门宽度为1μs,八重PRF(各种PRF的距离门个数参见本章搜索时序模块)中三重PRF上的距离门个数的最小公倍数为LCM(m1,m2,…,mi)=85470,其中m1=74,m2=70,m3=66,由此根据式(10)可得采用三重PRF解模糊时的最大不模糊距离为1282km。

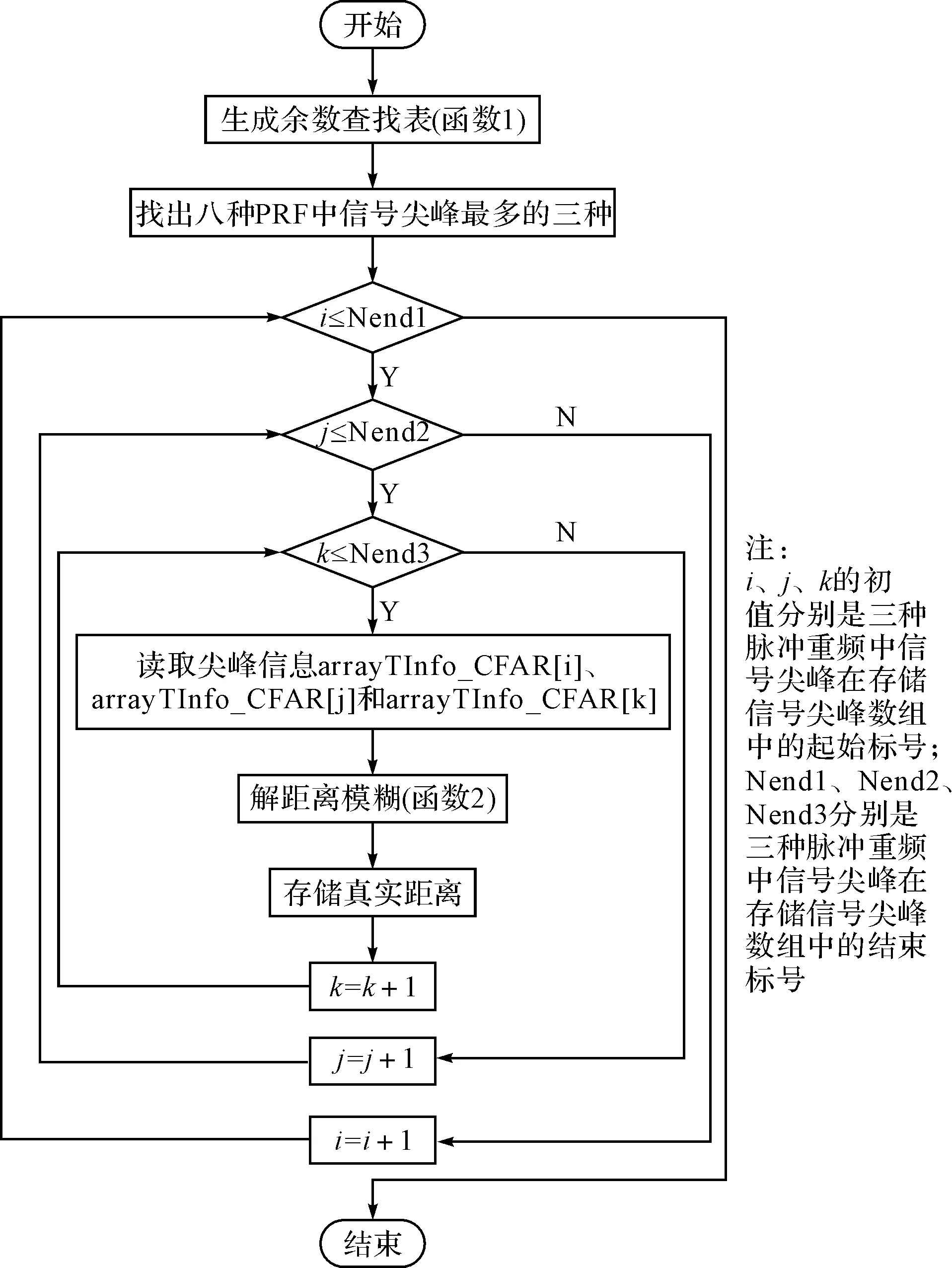
图3 解距离模糊模块运行流程图
图3中的函数1生成余数查找表的流程图如图4所示。
图3中函数2解距离模糊的流程图如图5所示。
4 对解距离模糊仿真模块的测试
通用化仿真设计实现后,得到解距离模糊仿真模块的输入/输出如表1和表2所示。

表1 解距离模糊仿真模块输入表
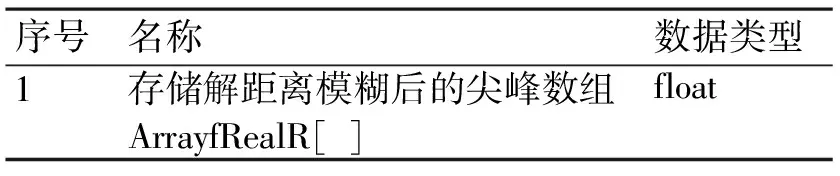
表2 解距离模糊仿真模块输出表
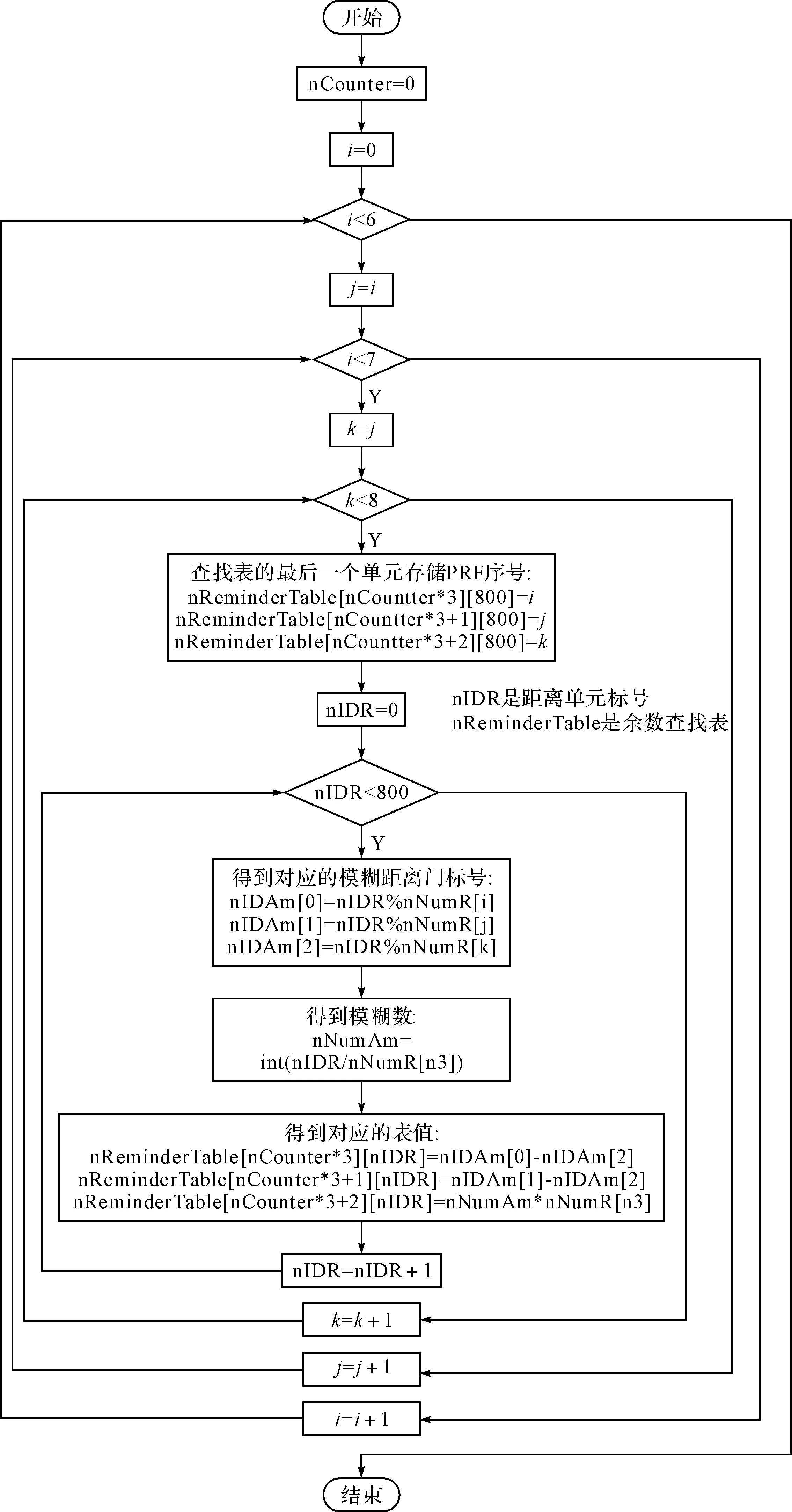
图4 生成余数查找表流程图
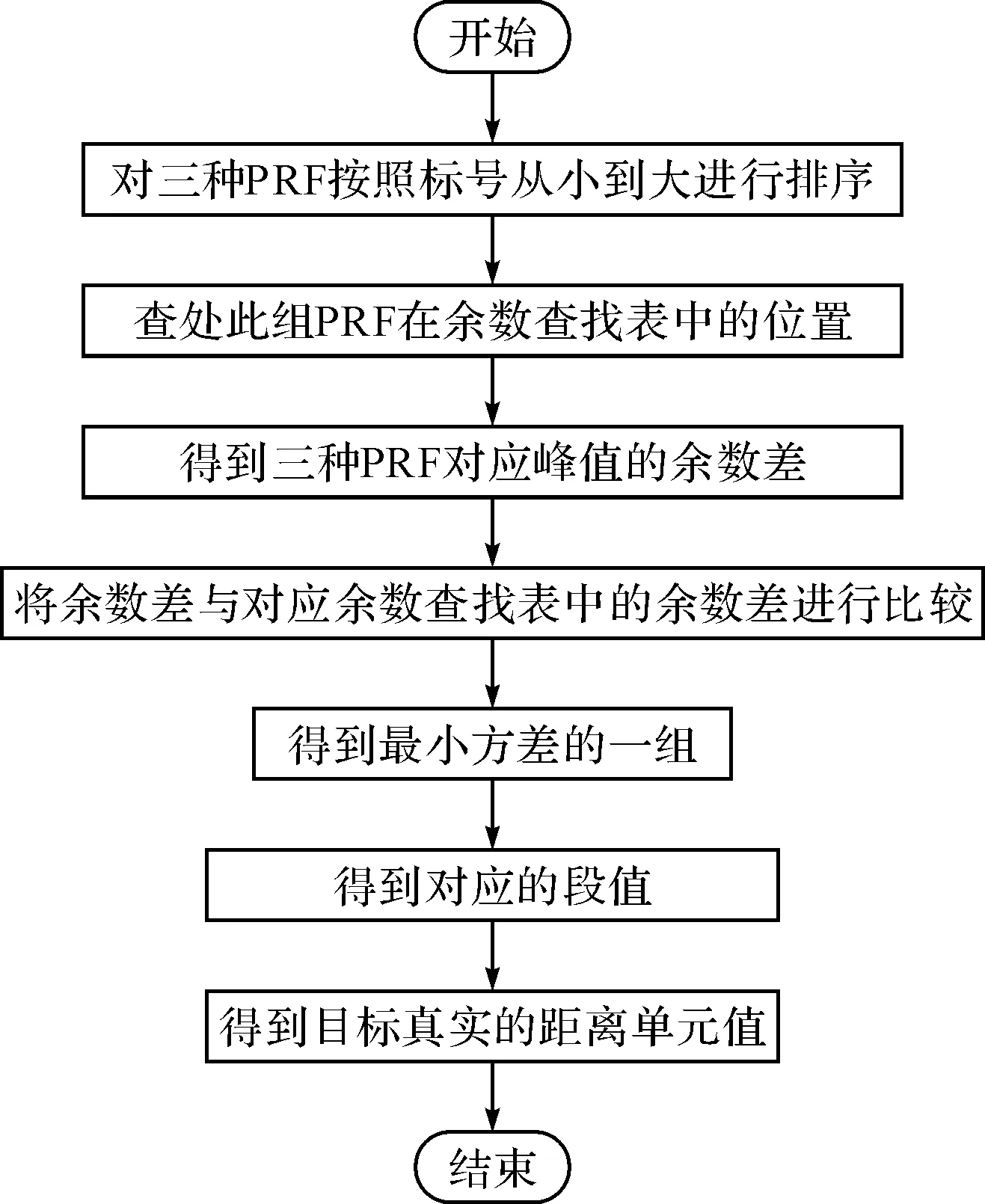
图5 解距离模糊流程图
将该仿真模块在Microsoft Visual C++开发平台下以动态链接库的形式加载到PD雷达仿真系统中,设置了三个目标进行测试,雷达运动平台参数和目标参数如表3和表4所示。
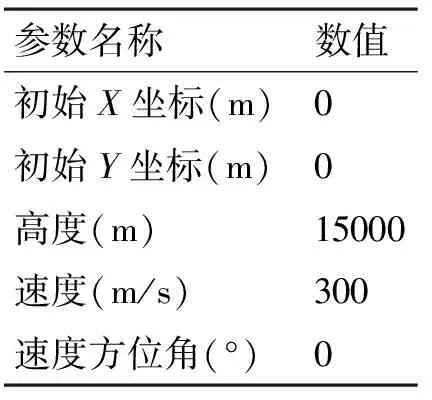
表3 雷达运动平台参数
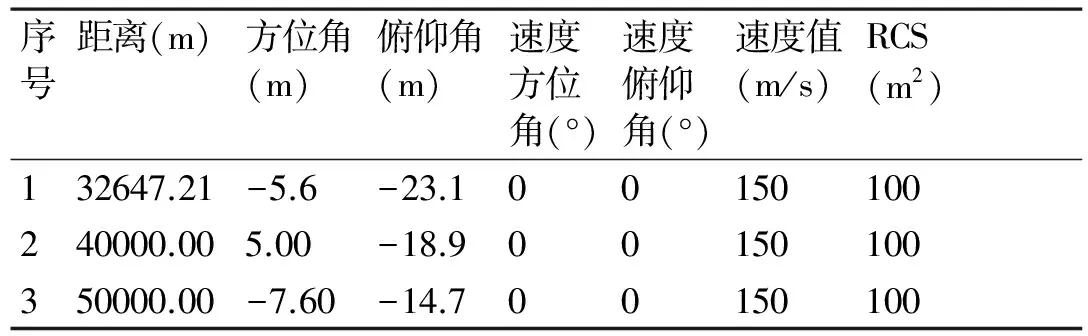
表4 目标参数(相对坐标系)
运行PD雷达仿真系统,记录下经解距离模糊模块处理后的相关数据,得到结果如下:
1) 目标1:
从录取的数据结果来看,目标1于第26个TOT(对应仿真时间1.394s)被录取,经过距离解模糊之后得到目标1的真实距离单元是217,一个距离单元是150m,所以目标1解模糊之后的距离是217×150=32550m,而由表3和表4中载机和目标的相关参数可以算出目标1此时的理论距离是32460m,两者的误差是32550-32460=90m,误差小于150m。
2) 目标2:
从录取的数据结果来看,目标2于第39个TOT(对应仿真时间2.0904s)被录取,经过距离解模糊之后得到目标2的真实距离单元是265,一个距离单元是150m,所以目标1解模糊之后的距离是265×150=39750m,而由表3和表4中载机和目标的相关参数可以算出目标1此时的理论距离是39700m,两者的误差是39750-39700=50m,误差小于150m。
3) 目标3:
从录取的数据结果来看,目标3于第49个TOT(对应仿真时间2.626s)被录取,经过距离解模糊之后得到目标3的真实距离单元是331,一个距离单元是150m,所以目标1解模糊之后的距离是331×150=49650m,而由表3和表4中载机和目标的相关参数可以算出目标1此时的理论距离是49620m,两者的误差是49650-49620=30m,误差小于150。
由上述结果可知,解距离模糊仿真模块是正确的。
5 结语
PD雷达工作在中脉冲重频(MPRF)或者高脉冲重频(HPRF)模式下时,很容易出现测距模糊现象。本文在深刻理解解距离模糊工作原理的基础上,利用Microsoft Visual C++开发平台,采用余数查找表的方法实现了解距离模糊仿真模块,并用动态链接库的形式对仿真模块进行封装。最后,在PD雷达仿真系统中对解距离模糊仿真模块进行了验证,证实了该模块算法正确,具有执行效率高、接口正确、通用化性能好的优点。
[1] 丁鹭飞,等.雷达原理[M].北京:电子工业出版社,2002:170-199.
[2] 承德宝.雷达原理[M].北京:国防工业出版社,2008:226-231.
[3] [美]Merrill I, Skolnik.雷达手册[M].北京:电子工业出版社,2010:135-139.
[4] [美]G. V. 莫里斯,等.机载脉冲多普勒雷达[M].航空工业出版社,1990:97-103.
[5] [美]Bassem R. Mahafza,等.雷达系统设计MATLAB仿真[M].航空工业出版社,2009:214-217.
[6] 高烽.多普勒雷达导引头信号处理技术[M].北京:国防工业出版社,2001:115-118.
[7] 张贤达.现代雷达信号处理[M].北京:清华大学出版社,1995:86-89.
[8] 王秀春.论现代机载PD火控雷达技术[J].现代雷达,2001,4(23):2-3.
[9] 高爱丽.脉冲多普勒雷达的数据处理仿真[D].成都:电子科技大学,2006:52-58.
[10] 毛士艺,等.脉冲多普勒雷达[M].北京:国防工业出版社,1990:223-229.
Simulation of Solving the Range Ambiguty in Pulse Doppler Radar Based on VC++
LU Daowei LI Xingmin
(Unit 93, No. 92941 Troops of PLA, Huludao 125000)
This paper expatiates the principle of solving the range ambiguty and its function in pulse Doppler radar, gives the process of solving the range ambiguty, using the Microsoft Visual C++ developing platform and the method of remainder finding table to simulate the solving the range ambiguty under the requirement of building PD radar simulation system, and tests the Solving the Range Ambiguty Module.
VC++, pulse Doppler radar, PRF, solving the range ambiguty, simulation
2015年6月3日,
2015年7月24日
卢道伟,男,硕士,工程师,研究方向:导弹武器系统总体。李兴民,男,高级工程师,研究方向:目标探测与制导控制。
TP391.9
10.3969/j.issn.1672-9730.2015.12.023
猜你喜欢
导航定位学报(2022年4期)2022-08-15
中国临床医学影像杂志(2022年5期)2022-07-26
百科探秘·航空航天(2022年6期)2022-06-28
北京航空航天大学学报(2021年9期)2021-11-02
科学(2020年3期)2020-01-06
医学新知(2019年4期)2020-01-02
计算机与数字工程(2019年4期)2019-05-07
电子制作(2017年7期)2017-06-05
物理教学探讨(2014年5期)2014-09-18
太空探索(2014年1期)2014-07-10