基于合作信标的水声跟踪数字信号处理系统设计*
2015-03-15 02:42黄其培
舰船电子工程 2015年12期
黄其培
(昆明船舶设备研究中心 昆明 650051)
基于合作信标的水声跟踪数字信号处理系统设计*
黄其培
(昆明船舶设备研究中心 昆明 650051)
高速数字信号处理系统作为水声跟踪测量系统的核心设计部分,在合作信标水声跟踪应用中,基于实时性的考虑,系统采用了FPGA和DSP结合设计。论文给出了系统硬件设计框图,并详细介绍了该软件设计流程及接口设计。通过湖上水声跟踪试验,验证了系统设计的实用性、可靠性,且该系统现已投入工程应用,取得了明显的经济效益。
水声跟踪; 合作信标; DSP; 数字信号处理; 软件设计
Class Number TP302
1 引言
为了提高科研试验的精确性及可靠性,为工程应用提供有力保障,系统设计了基于合作信标的水声跟踪测量系统,满足了多目标、高精度、实时性的跟踪测量。跟踪系统主要包括水下坐底式接收基阵(短基线阵和长基线阵)、岸上数字信号处理系统及上位机数据解算软件。高速数字信号处理系统主要完成水下基阵的三路水声信号(x,y,z)的采样,信号鉴幅、鉴宽处理,信号时差测量及深度解算和数据传输功能。采用谱估计和线性相关处理算法,判断出采集脉冲的特征(即属于哪个目标,何种脉冲性质),计算此原始信号的包络,并求出原始信号平均幅度,根据脉冲性质进行目标识别,把以上数据以约定的数据格式发送到上位机。
高速数字信号处理系统是水声跟踪测量系统的关键核心部分,本设计采用FPGA和DSP结合设计,实时性高,数据处理能力强[1]。长期的系统运行及湖上试验验证,证明了系统的稳定、可靠,目前已投入工程应用,取得了明显的经济效益。
2 系统原理
根据水下目标跟踪系统信号处理任务及实时性要求,本设计选用ADI公司TigerSHARC®系列的ADSP-TS201作为主处理器。以同步脉冲到达为起点,由AD7665芯片对原始信号以500kHz的采样率实现对来自水声的多路模拟信号的连续同步采集,同时对采集的信号进行分析处理,经过对脉冲信号的时延估计、宽度鉴别,检测识别出有效信号,并精确估计信号时延和目标深度,将这些信息通过RS422口发给上位机,最终通过上位机软件解算,实现跟踪轨迹实时、动态显示。高速数字信号处理系统能够与上位机进行实时通讯,同时通过发送相应的控制信息,以实现上位机对数字系统的控制。
3 硬件环境
数字信号处理设备硬件电路主要由ADSP-TS201、A/D、D/A、总线扩展口、高速RAM、FPGA、FLASH等组成,数字信号处理系统硬件结构图如图1所示。
DSP处理器采用ADI公司最新推出的TigerSHARC®系列浮点DSP,其内核时钟频率高达600MHz,片内具有24Mbit的动态存储器。TS201内部具有四条独立的128bit的数据总线,内部数据带宽高达33.6G byte/s。和FPGA相比,TS201的高性能、编程的灵活性、多处理器协同工作能力、高IO吞吐率等特点,使它更适用于大规模的信号处理任务[2]。芯片内部集成JTAG在线可编程仿真口,通过外接仿真电缆由PC机实现程序下载和在线仿真。
FLASH存储芯片采用Fujitsu公司的MBM29LV400BC,可用作512M×8bit和256K×16bit两种方式。
A/D转换器选用ADI公司的AD7665,它的最大采样频率为570kSPS,采样精度16位,输入动态范围可达±10V,可以满足水下目标信号动态范围的要求[3]。
D/A转换器选用ADI公司的AD5663,分辨率16位,双路电流型输出,经两级运放后输出电压范围为(-5V,+5V)。
FPGA选用Altera公司Cyclone Ⅱ系列的EP2C35芯片,用于实现板上的接口与时序逻辑。系统将双端口RAM、RS422通信协议、DAC接口、复位与“看门狗”等统一集成在FPGA中,简化了硬件平台的设计。FPGA的配置芯片采用的是EPCS16[4]。
4 软件详细设计
4.1 接口设计
数字信号处理组件通过RS422串口通信服务器,按照约定的通信协议,接收试验参数,将目标信息传送给上位PC机,PC机根据这些信息进行弹道跟踪测量[5]。接口关系如图2所示。

图2 数字信号处理组件与PC机接口
4.2 信标体制
根据工程项目的实际要求,系统设计能够满足工程应用的多种信标解算,出于相关规定要求,这里只对某一种信标体制作简要介绍,如图3所示。该信标体制的同步周期(t1),测量周期(t2),深度值的时延值调制时间为t3。一个同步周期包括四组脉冲信号,每组信号分别由CW单频脉冲和LFM调频脉冲构成[6]。

图3 信标体制
系统进行信号检测时,分别对脉冲信号进行特征甄别和时延估计,并把相应的结果经时差去模糊修正和抗干扰处理后传送至上位机。
4.3 工作程序
工作程序的软件处理主要包括:初始化程序;启动A/D采集原始信号;实时对信号进行功率谱分析[7];将满足功率谱的原始信号进行包络检波并进行信号特征识别,求出原始信号对应的包络前沿和平均幅度;信号归一化处理;频率估计和样本重构;信号特征鉴别;把相关数据以约定的数据格式发送到上位机。
程序部分主要包括:
1) 程序初始化模块;
2) 主程序模块;
3) 同步中断服务程序模块;
4) RS422串口中断服务模块;
5) 双口RAM半满中断处理模块;
6) DMA中断处理模块;
7) 信号功率谱分析模块;
8) 信号频率估计和样本重构模块;
9) 相关处理模块;
10) 包络检波模块;
11) 数据传送模块;
12) 多普勒修正模块。
目标信号经过前置放大、滤波后,将原始信号送给处理板的A/D采集部分,两路A/D以500kHz的采样速率进行同步采集[8],DSP分析采集到的数据,进行包络检波、宽度判别、记录有效信号时延值,如果满足设定门限值,进行实时的功率谱分析、信号特征判断,而对于未满足包络检波门限的脉冲,则直接进行检测±LFM信号的特征分析[9]。根据脉冲性质进行信号特征识别,将分析结果通过RS422口传送到上位机。数字信号处理系统信号流程如图4所示。

图4 数字信号处理组件与PC机接口
4.3.1 主程序处理模块
主程序部分主要完成对采集到的信号进行包络、谱分析有效后,计算出原始信号的包络平均和幅度,频率、时延估计及信号特征判别(对于调频信号,还要进行与样本信号的相关处理)[10],同时对检测结果进行时差去模糊修正和抗干扰处理[11]。通过统计DMA所传输的数据块进行计时,每间隔0.5s将目标号(以便多目标之间区别)、脉冲周期号、信号到达的绝对时间、转化后的信号时差数据、信号特征、采样信号平均幅度、信号多普勒频偏等信息送往上位机处理。软件程序处理流程如图5所示。
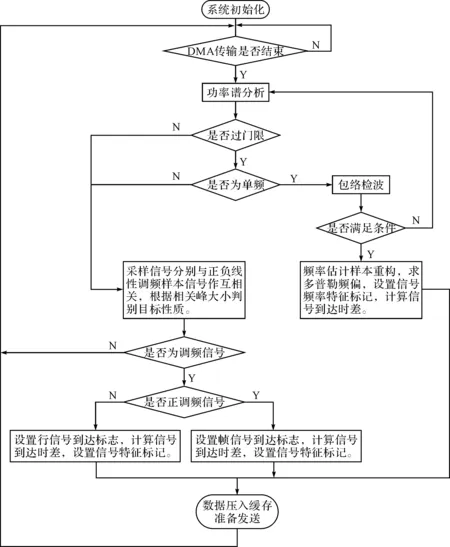
图5 软件程序处理流程
4.3.2 RS422串口中断服务模块
DSP与上位机的通信采用RS422串口标准,系统中的RS422通信协议在FPGA中实现。同时,FPGA为DSP通过串口发送/接收数据提供寄存器接口。这样就大大减轻了DSP的工作量,具体串口工作由FPGA来实现。当上位机向DSP的发送多个字节数据,DSP将在串口中断中完成整包数据接收,并进行处理及控制命令选择判断,DSP根据不同的判断结果,执行不同的命令(如:模式设置、增益控制、系统复位等),同样,DSP也可以通过串口向上位机反馈数据信息。串口中断处理流程如图6所示。

图6 RS422串口中断流程图
5 跑船试验验证
为了验证系统设计,进行了湖上跑船试验,在跑船过程中,舰船携带信标声源和GPS设备在已布放了长、短基线的水域按指定路线航行,船航行的过程中信标声源一直是发射状态,GPS也实时地把位置信息传送至跟踪系统,同时在岸端通过跟踪系统进行实时的水声跟踪,实验结果表明能够很好地跟踪出目标轨迹,且目标跟踪轨迹与GPS轨迹有较好的重合性,该试验过程中采用差分GPS设备,精度达厘米级,图7为两个不同短基线阵区的跑船试验结果,图8为长基线阵区跑船试验结果,图中实线轨迹为水声跟踪轨迹,虚线轨迹为GPS轨迹。该工程投入使用已经为多个条次产品做了有效考核,达到了令人满意的结果。该高精度水声跟踪测量系统将为我国海军试验靶场建设提供有力保障,也将成为产品鉴定的有效依据,由此验证了系统定位精确性、实用性、可靠性及稳定性。

图7 短基线跑船试验结果

图8 长基线跑船试验结果
6 结语
数字系统设计上采用真正模块化、结构化、功能化的设计,提高系统的可靠性。在信号处理方面主要考虑了同步测距的距离模糊、多途效应、防漏点及时延测量等关键技术,并采取了相应的解决措施。最后,通过湖上长、短基线阵跑船试验验证,有很好的跟踪效果,证明了软件设计的实用性,可靠性,稳定性,并现已投入工程应用,为科研试验,海洋开发等工程项目提供有力保障,产生了显著的经济效益。
[1] 何苏勤,王忠勇.TMS320C2000系列DSP原理及应用技术[M].北京:电子工业出版社,2002.
[2] 苏涛,蔡建隆,何学辉.DSP接口电路设计与编程[M].西安:西安电子科技大学出版社,2003.
[3] ADSP-TS201. TigerSHARC Processor Hardware Reference, Rev 1.1,December,2004.
[4] ADSP-TS201. TigerSHARC Processor Programming Reference, Rev 1.0,August,2004.
[5] 彭启琮,武乐琴,张舰,等.编译.TMS320VC55X系列DSP的CPU与外设[M].北京:清华大学出版社,2005,12.
[6] 何成兵,黄建国,阎振华,等.M元扩频OFDM水声通信新方法[J].西北工业大学学报,2007,25(2):190-194.
[7] 胡广书.数字信号处理-理论、算法与实现[M].北京:清华大学出版社,2003.
[8] 高西全,丁玉美.数字信号处理[M].西安:西安电子科技大学出版社,2008.
[9] 赵延安,张效民,姚运启,等.舰船辐射噪声功率谱特征提取及系统实现[J].计算机测量与控制,2010(8):1821-1824.
[10] 宋振宇,丁勇鹏,赵秀丽,等.基于LOFAR谱图的水下目标识别方法[J].海军航空工程学院学报,2011,26(3):283-286.
[11] 李秀坤,杨士莪.水下目标特征提取方法研究[J].哈尔滨工程大学学报,2001,22(1):25-29.
Digital Signal Processing System Design of Underwater Acoustic Tracking Base on Cooperative Beacon Signal
HUANG Qipei
(Kunming Shipborne Equipment Research and Test Center, Kunming 650051)
High speed digital signal processing system is the core part of the underwater acoustic tracking and measuring system. According to the cooperative beacon underwater acoustic tracking application, based on the consideration of real-time, the system uses FPGA and DSP combination design. This paper gives structure diagram of the hardware system, and introduces the software design process and interface design. By underwater acoustic tracking test on lake, the practicability, reliability of system design are verified, and the system has been put into engineering application, which achieved significant economic benefit.
underwater acoustic tracking, cooperative beacon signal, DSP, digital signal processing, software design
2015年6月3日,
2015年7月27日
黄其培,男,硕士,工程师,研究方向:水下航行体轨迹跟踪测量技术。
TP302
10.3969/j.issn.1672-9730.2015.12.014
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
——信号处理
无线电工程(2022年10期)2022-10-24
广东通信技术(2022年3期)2022-04-25
电子制作(2019年14期)2019-08-20
电子制作(2018年17期)2018-09-28
制导与引信(2017年3期)2017-11-02
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
发明与创新(2016年17期)2016-12-22