基于网络的智能化剑杆织机设计
2015-03-14 06:48俞宝福何勤奋
机电信息 2015年15期
俞宝福 俞 凌 何勤奋 周 泓
(1.绍兴纺织机械集团有限公司,浙江 绍兴312065;2.绍兴市职教中心,浙江 绍兴312000;3.绍兴县永乐纺织机械有限公司,浙江 绍兴312065;4.浙江大学仪器科学与工程学系,浙江 杭州310027)
1 剑杆织机的研发现状
剑杆织机作为无梭织机中的一种,具有性价比高、适应性广等特点,在生产高档服装面料等纺织品领域有独特的优势。在现代纺织工业中,剑杆织机已成为无梭织机中适用性最强、成本较低的一种织机,得到了广泛的应用。
近几年,国内织机生产厂家经过不断努力,对剑杆织机的生产原理与工艺进行了提升,在消化吸收国外先进织机技术的基础上改造和优化了自己的剑杆织机机构,使其性能趋于稳定可靠。虽然目前国产剑杆织机的自动化控制水平有了很大提高,但与国外先进织机相比,在网络化、智能化方面还存在一定差距。因此,加强新技术应用,提高国产剑杆织机的智能化、高速化、自动化水平,对于剑杆织机研制和生产赶上世界先进水平具有十分重要的意义。
2 智能化高速剑杆织机的设计方案
2.1 电气控制系统实施方案
剑杆织机是一种周期性循环工作的织造机械,每次工作循环中,开口、引纬、打纬、送经和卷取五大运动所对应的各个机构按规律循环动作一次。根据剑杆织机的控制要求,整个织机电气控制系统按功能采用模块化设计,将控制系统划分为多个子系统,各子系统既需完成各自独立的功能,又要相互配合与补充,以保证织机整体按要求运作,完成整个织造过程。本设计中将剑杆织机控制系统划分为核心控制模块、信号检测模块、电机及驱动电路模块、人机交互模块、网络通信模块和电源模块等部分。
电气控制系统结构框图如图1所示。
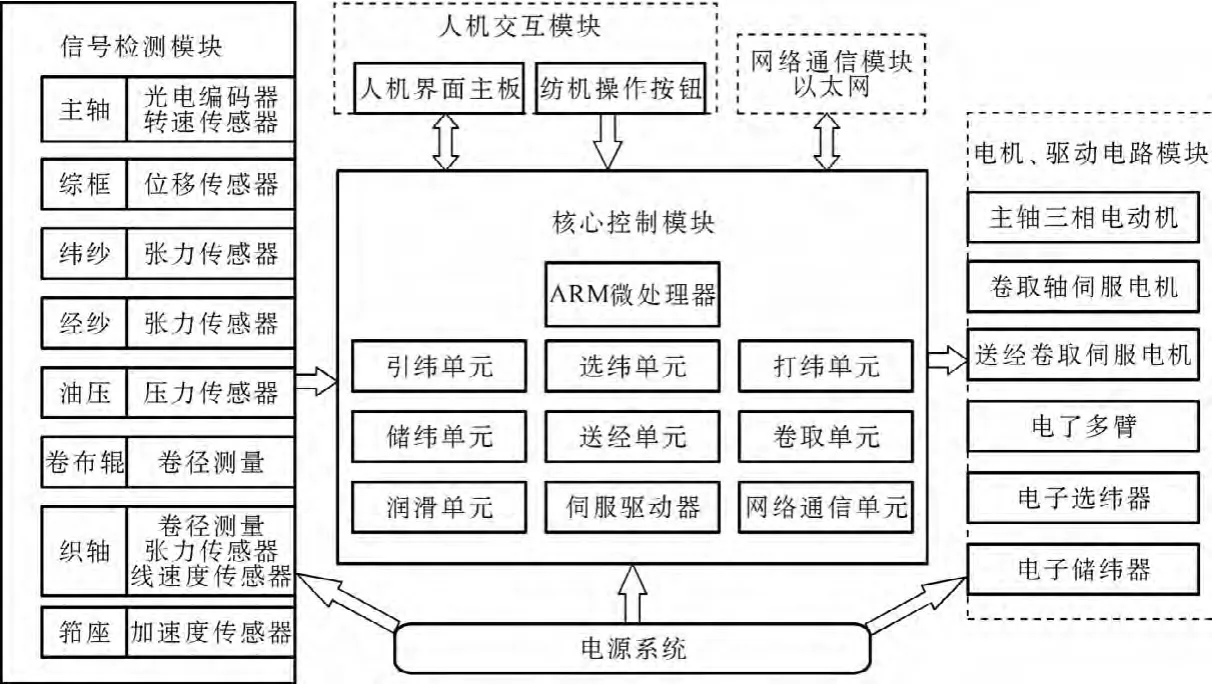
图1 电气控制系统结构框图
本方案采用基于ARM的嵌入式电气控制系统,核心控制模块采用32位高速CPU控制芯片,首先通过对系统资源的分析为剑杆织机各部件分配系统资源;然后为剑杆织机自动控制的各种操作创建任务线程;通过传感器采集的信号,对剑杆织机的工作情况进行实时监控;同时通过网络接口实现织机信息资源的共享与统一管理。
本方案采用的智能化电气控制系统具有以下功能:实时监控织机的运行情况和各项工艺参数,主要包括电子卷取、电子送经、电子选纬、电子提花、纬纱断头自动修补、储纬器自动切换和纬纱张力自动控制等;实现织机故障的自我诊断,能方便维修人员快捷查找、发现并解决问题;能通过网络化接口实现织机的联网监控和管理。人机界面配备彩色液晶大显示屏,功能键盘作为织机操作界面,能实时监控织机的运行情况和各项工艺参数,实现织机的高可靠性、智能化控制。
2.2 经纱张力控制技术的应用
所有织物均是由经纱和纬纱垂直交织而成的,在剑杆织机织造过程中经纱张力的波动是影响织物布面效果的重要因素,对经纱张力进行控制对于纺织品质量和生产效率的提高尤为重要。
经纱张力的大小主要受开口、打纬、纬密、经轴直径、织机速度以及张力设定值等工艺参数的影响。此外,经纱的粗细、上浆质量、经纱密度、排列均匀度、经位置线、织物布面花型等因素均会对经纱张力产生影响。因此,整个织机经纱张力系统是一个非常复杂的多因子非线性时变系统,具有非线性、时变性以及模型不确定性等特点,将传统的PID控制策略直接应用于经纱张力控制,效果并不理想。
本方案结合PID控制响应速度快、稳态误差小和模糊控制器超调量小、调整时间短的优点,研发模糊PID控制器,可以较好地响应经纱张力变化,减小或消除经纱张力产生的静态误差,从而实现经纱张力稳定控制。
2.3 基于专家知识和数据挖掘技术,建立过程参数在线监测、故障诊断和优化控制系统
以历史生产数据(包括正常工况数据和故障数据)为基础,结合统计学习理论,建立过程参数的实时监控和故障诊断系统,提前预报可能出现的过程故障,辅助制定相应的检修方案,减少维修时间。
为了快速排除设备故障,提高剑杆织机运行的可靠性,本设计根据剑杆织机工艺要求,研发基于多模块合成的智能故障诊断系统,利用多传感器信息融合技术,先对剑杆织机每一关键部件建立故障诊断模型,然后根据加工过程中每道工序之间信息传递的层次性和相关性,增加一个融合诊断网络,构成一个完整的故障诊断系统,从而确保故障诊断的准确性。
2.4 网络接口设计
一个纺织企业通过企业内部网络可对所属的所有织机进行集中监控,可通过网络下达生产任务,并采集实时生产数据绘制成报表。一旦纺机出现故障,将通过网络实时报警并进行故障自动记录。该故障信息还可通过企业外网直接提供给织机制造企业,实现远程诊断或提供技术支持等。图2展示了基于物联网的剑杆织机网络图。
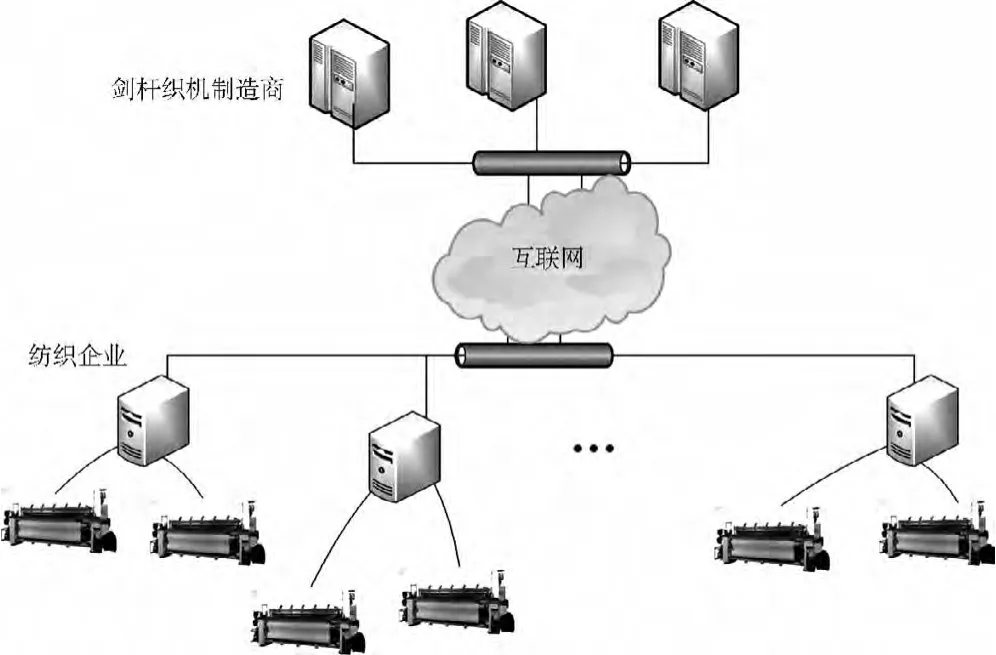
图2 基于物联网的剑杆织机网络图
系统网络模块主要由3部分组成:有线网络、WiFi网络和3G网络。有线网络主要是为了方便开发调试使用,WiFi网络是为了给用户提供WiFi热点,3G网络能真正实现信息系统的网络接入。采用DM9000作为有线网络控制器,DM9000为100M以太网网络控制器,广泛应用于移动平台;无线网络控制器采用 WM-G-MR-09;3G模块采用 MF210。其中,将DM9000映射到系统内存空间,通过地址直接读写该模块实现收发数据;WiFi模块通过SDIO与CPU连接;3G模块采用USB控制器与CPU连接。
3 智能化高速剑杆织机的设计特点
本智能化高速剑杆织机具有以下设计特点:
(1)研发基于嵌入式系统的电气控制系统,实现织机的高度智能化控制。采用32位高速CPU控制芯片实现模块化控制,采用彩色液晶图像显示屏,功能键盘作为织机操作界面,能实时监控织机的运行情况和各项工艺参数,实现电子卷取、电子送经、电子选纬、电子绞边、电子多臂、电子提花、纬纱断头自动修补、储纬器自动切换、自动对织口、自动防开车档和纬纱张力自动控制等功能,并实现织机故障的自我诊断,从而方便维修人员快捷查找、发现并解决问题。
(2)研究剑杆织机关键机构的动力学模型,优化设计,提高其高速适应性。采用动态模拟软件建立剑杆织机虚拟样机,根据实际工况对剑杆织机关键机构进行全面的仿真试验,研究不同转速和各种运行工况下剑杆织机的动态性能,获得剑杆织机在各种运行工况和不同结构尺寸下的大量动态仿真数据,通过对剑杆织机各高速旋转部件进行动态模拟分析,消除不合理的设计及加工缺陷,提高零件的加工精度,从而进一步提升剑杆织机高速运行的品质。
(3)研究经纱张力的智能模糊PID双模控制技术。在主轴回转周期内多次检测经纱张力,并在分析经纱张力影响因素的基础上,采用模糊控制算法和PID控制算法并联对送经电机转速进行调整,通过引进补偿系数,消除经纱张力静态误差,以保持经纱张力的稳定。
(4)研发剑杆织机物联网接口功能,实现织机信息资源的共享与网络化管理。通过局域网络接口,实现一个应用现场多台织机的联网工作,实现任务集中调度与网络下传以及多台织机的工作状况与故障信息上传;通过广域网络接口,实现织机生产厂家对应用于各个纺织企业的织机的远程维护。
4 结语
在本企业研究院牵头下,设计与开发了本文所述智能化高速剑杆织机,融合了流动理论、织机原理、控制理论、机构设计、嵌入式系统等。到目前为止,研发工作已全部完成,样机已得到了实际测试与应用,达到了预期的设计目标,实现了很好的经济效益与社会效益。
[1]郑元湖.我国剑杆织机的发展现状和趋势[J].装备机械,2009(3):8-11.
[2]杨燕飞.剑杆织机运动控制研究[D].杭州:浙江大学,2004.
[3]吴小艳.基于GPRS的剑杆织机群实时集中监控系统[D].武汉:武汉纺织大学,2013.
[4]陈成.剑杆织机嵌入式控制系统(硬件)研究与开发[D].上海:东华大学,2011.
[5]徐立权.基于伺服控制的剑杆织机送经及卷取机构的研究[D].杭州:浙江工业大学,2001.
[6]林美珍.模糊控制理论的应用[J].宁德师专学报:自然科学版,201,22(4):353-355,384.
[7]刘清波.基于CAN总线的剑杆织机监控网络系统的研究与开发[D].杭州:浙江大学,2004.
猜你喜欢
纺织报告(2021年4期)2021-06-21
国际纺织导报(2019年5期)2019-11-14
纺织学报(2019年5期)2019-05-30
纺织科学研究(2017年4期)2017-05-17
纺织科学研究(2017年1期)2017-05-17
现代工业经济和信息化(2016年12期)2016-05-17
纺织机械(2016年2期)2016-03-11
化纤与纺织技术(2015年1期)2015-12-26
纺织机械(2015年7期)2015-04-17
山东纺织科技(2014年3期)2014-04-06