深水半潜式平台锚泊系统动力响应研究
2015-03-14 06:47:20李亚男覃刚唐文献张建张宗政
机械制造与自动化 2015年1期
关键词:稳定性
李亚男,覃刚,唐文献,张建,张宗政
(1. 江苏科技大学 机械工程学院,江苏 镇江 212003; 2. 武汉船用机械有限责任公司,湖北 武汉 430084)
深水半潜式平台锚泊系统动力响应研究
李亚男1,覃刚2,唐文献1,张建1,张宗政1
(1. 江苏科技大学 机械工程学院,江苏 镇江 212003; 2. 武汉船用机械有限责任公司,湖北 武汉 430084)
摘要:以一座工作水深为1500m的深水半潜式海洋平台为研究对象,建立了风、浪、流随其特征参数在空间和时间区域内的表述模型,对平台进行锚泊系统时域耦合分析,找出了平台在六个自由度方向的动力响应对平台稳定性的影响程度以及布锚方式对系泊线张力分布的影响,为深水锚泊定位系统时域耦合分析提供方法基础,并能够进一步为平台的安全性能运营管理提供模型和数据支持。
关键词:半潜式海洋平台;稳定性;时域耦合分析
0引言
世界范围内的油气勘探与开发重点己转向了广袤的海洋,并逐渐形成了投资高、风险大、高新技术密集的能源工业新领域。而半潜式海洋平台是海洋油气资源勘探和开发的重要载体。一般来说,对于水深在1500m以下的作业平台,采用锚泊定位,所以锚泊定位系统设计是海上浮式结构物整体设计过程中绝不可忽视的重要环节。
国外关于锚泊系统运动响应和动力张力分析的研究方法已经基本完善,并已编制了可以实际工程应用的计算程序包;1959年美国学者应美海军的要求从理论上研究了单点水下系泊在各种不同振幅、频率的波浪作用下缆绳张力幅值的变化;自1964年ArabianGulf使用第一套SPM以来,各种类型的SPM相继出现;1970年Reba和Hebertlll[1]依据悬链线理论推导了单根锚链在发生水平、垂直位移时锚链张力和位移之间的关系。Ractliffei[2]对准静力模型的有效性进行了论证。20世纪80年代中期国内转塔式锚泊系统开始发展;2003年大连理工大学郝春玲[3]利用分段外推的数值方法,对锚链系统形状和受力进行了分析;2007年,孙金丽[4]等人讨论了波数、水深和初始水平预张力对锚泊系统运动响应的影响;2010年周素莲[5]等人给出了深水半潜式平台系泊系统的基本设计方法; 2011年,哈尔滨工业大学的翟钢军[6]等人以一座工作水深为1500m的深海半潜式钻井平台为例,对风浪联合作用下深水半潜式平台运动响应模型进行了研究分析。
在专业海工软件ANSYS/AQWA中建立一座工作水深为1500m的深水半潜式钻井平台数值模型,根据海洋平台设计规范与标准,设计合适的系泊缆,并对目标平台所承受海洋环境载荷进行分析计算,对目标平台在风载、浪载、流载等环境载荷作用下进行锚泊系统时域耦合分析。
1半潜式平台数值模型
以工作水深1500m的半潜式海洋平台为研究对象,建立数值模型。本平台为双浮体、4立柱、箱型封闭式上平台,物理样机与数值模型如图1所示,平台工作环境及作业参数见表1,锚泊系统的布置如图2所示,8根系泊线呈对称布置,按顺时针方向回转排列,其中两两系泊线间的夹角为45°。

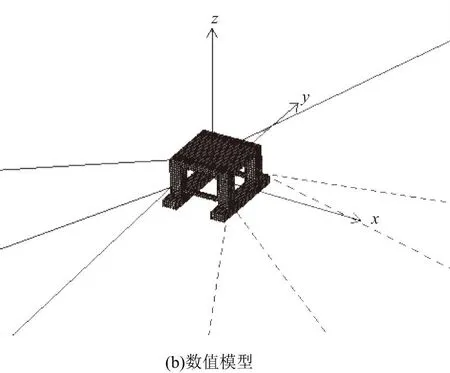
图1 物理样机与数值模型
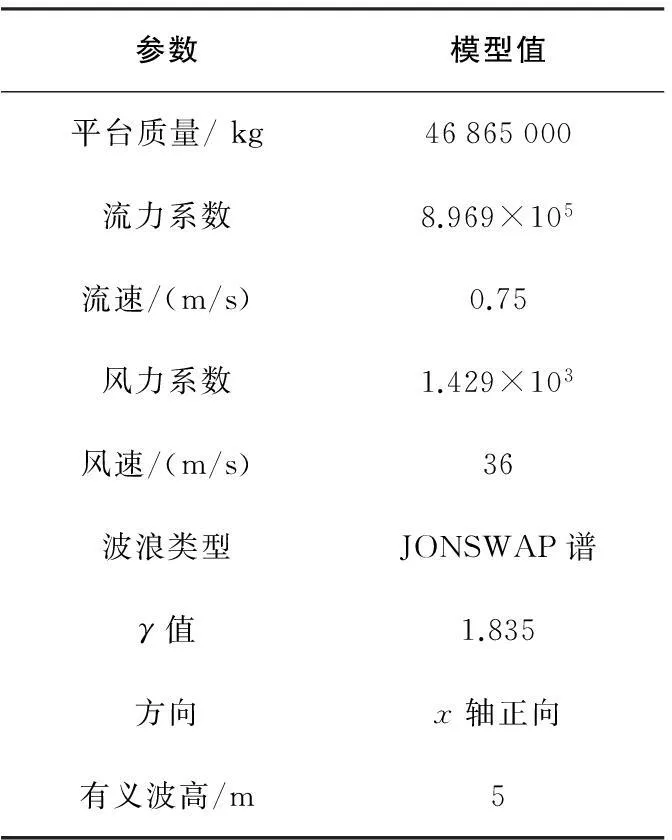
参数模型值平台质量/kg46865000流力系数8.969×105流速/(m/s)0.75风力系数1.429×103风速/(m/s)36波浪类型JONSWAP谱γ值1.835方向x轴正向有义波高/m5
2数值计算理论
目标平台受风、浪、流的共同作用,作用方向如图2所示。平台运动响应的数值计算采用专业海工软件ANSYS/AQWA进行分析求解,其计算理论主要基于经验公式Morison法和三维势能理论。
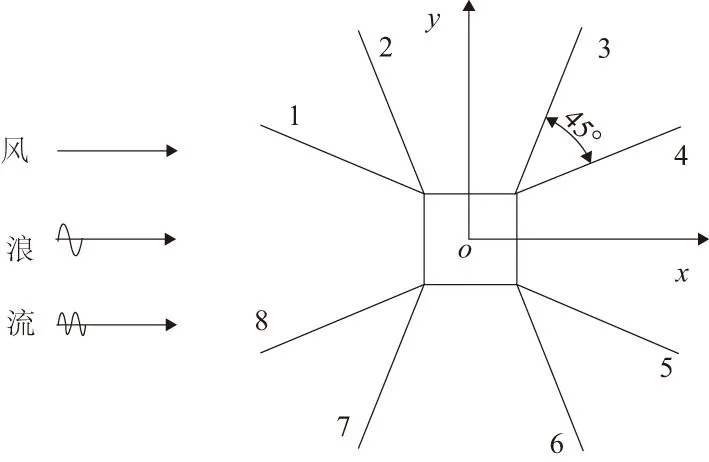

图2 锚泊系统布置图
Morison法主要考虑波浪对结构物的粘滞效应和附加质量效应,对于尺度大于0.2的海工结构物,波浪对结构物的作用主要是附加质量效应和绕射效应,主要采用三维势流理论计算波浪对结构物的作用力。对于半潜式平台的浮体和立柱采用三维势流理论计算波浪力,而对于横撑结构采用Morison方程计算,由Morison方程计算得到的粘性阻尼增加到由势流理论得到的阻尼项中,实现浮体结构强度校核。计算三维浮体波浪载荷时,把平台结构作为一个整体,在平台水下部分的表面上划分网格,根据三维源汇分布理论,采用面元数值计算方法求解平台在波浪中受到的载荷。
其中横撑等细长杆件采用Morision公式模拟计算。大结构物如船体立柱、甲板、沉垫等采用三维势流理论进行计算,以下为Morison方程的计算公式(即作用在长度为DZ的垂直刚性圆柱切片上的水平力):

(1)
式中:力的正方向为波浪的传播方向;ρ0为水的密度;D为圆柱直径;u和a1分别为切片中未受扰动流体的水平流速和加速度;CM和CD为质量系数和阻力系数。
风载荷和流载荷的计算由公式如下所示:

(2)
(3)
Cw、Cc分别为流力系数和风力系数,根据式(2)、式(3),求得Fw=1.85×106N,Fc=5.045×105N。载荷施加方向为x轴正方向,如图2所示。
3系泊线动力学设置
系泊线采用组合锚索,上端为钢丝绳,下端为K4无档锚链,两段共长2700m,表2为系泊线各段材料属性设置。

表2 系泊线配置及材料属性
4结果分析与讨论
充分考虑风、浪、流等环境载荷的综合作用和波谱的影响,在时域内耦合分析平台和系泊系统的动力特性,其中风、浪、流的施加方向一致,所以其合力所达到的扭矩最大。运用专业水动力分析软件ANSYS/AQWA- DRIFT模块对平台进行了耦合时域分析(含系泊线),模拟时间为5000s,通过运算求出了平台各项水动力参数,包括船体重心位移、船体重心速度与加速度、8根系泊线的受力情况。
1) 船体重心位移分析
由于风、浪、流载荷的施加方向为x轴正向,所以船体的纵荡位移应该大于横荡位移,如表3所示,平台的最大水平位移为21.43m,符合规范要求平台最大水平位移应控制在水深10%范围以内。表3为船体重心位移值,其中均值取2000s~5000s之间的数值平均。图3为船体重心的时间历程位移曲线。

表3 船体重心响应
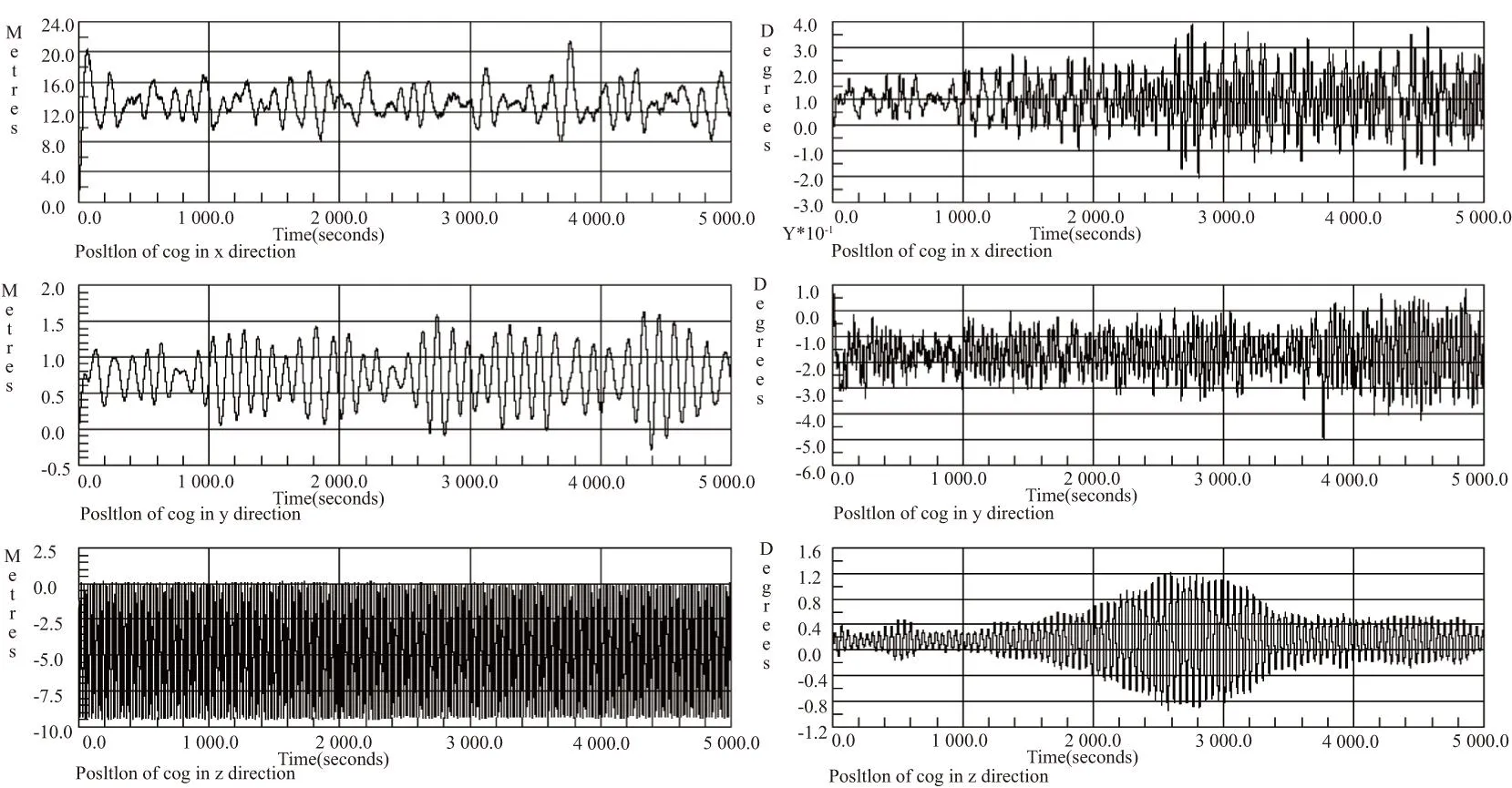
图3 船体重心时间历程位移曲线
2) 船体重心速度和加速度分析
半潜船的速度和加速度是影响船体惯性和船上作业人员晕船的重要原因,船体重心速度值如表3所示,图4为船体重心时间历程速度曲线,船体速度最大值发生在垂荡方向,其中横荡和横摇方向的速度对船体影响最小。
加速度也是影响半潜船钻探作业稳定性的一个重要因素,船体重心加速度值如表3所示,图5为船体重心加速度曲线。从图5中可以得出,在船体6个方向的加速度中,纵摇方向的加速度对船体的稳定性影响最大,符合船体加速度<1.4 m/s2的标准(NORDFORSK,1987),其中船体在横荡方向的加速度对船体的稳定性影响最小。
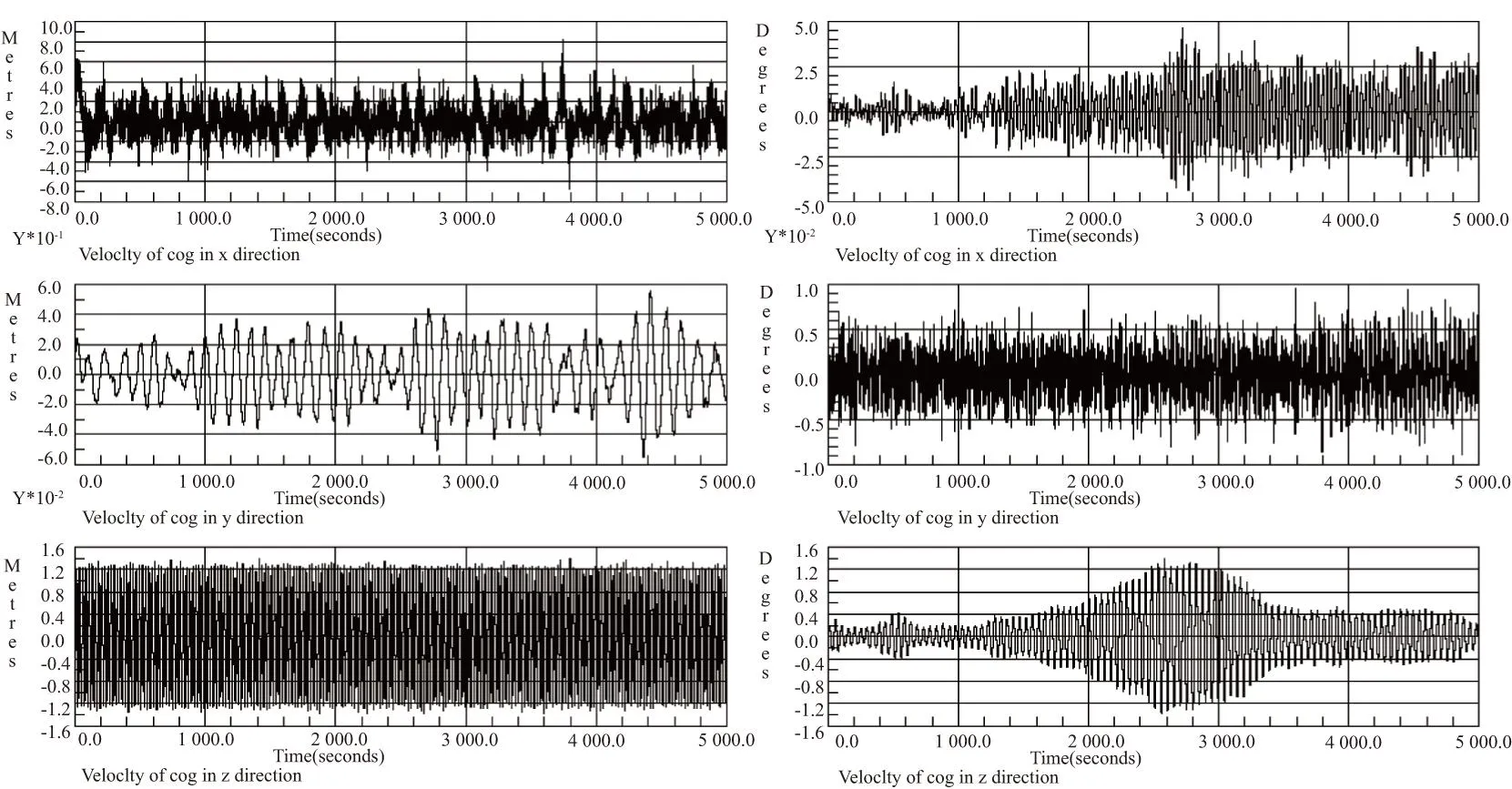
图4 船体重心时间历程速度曲线
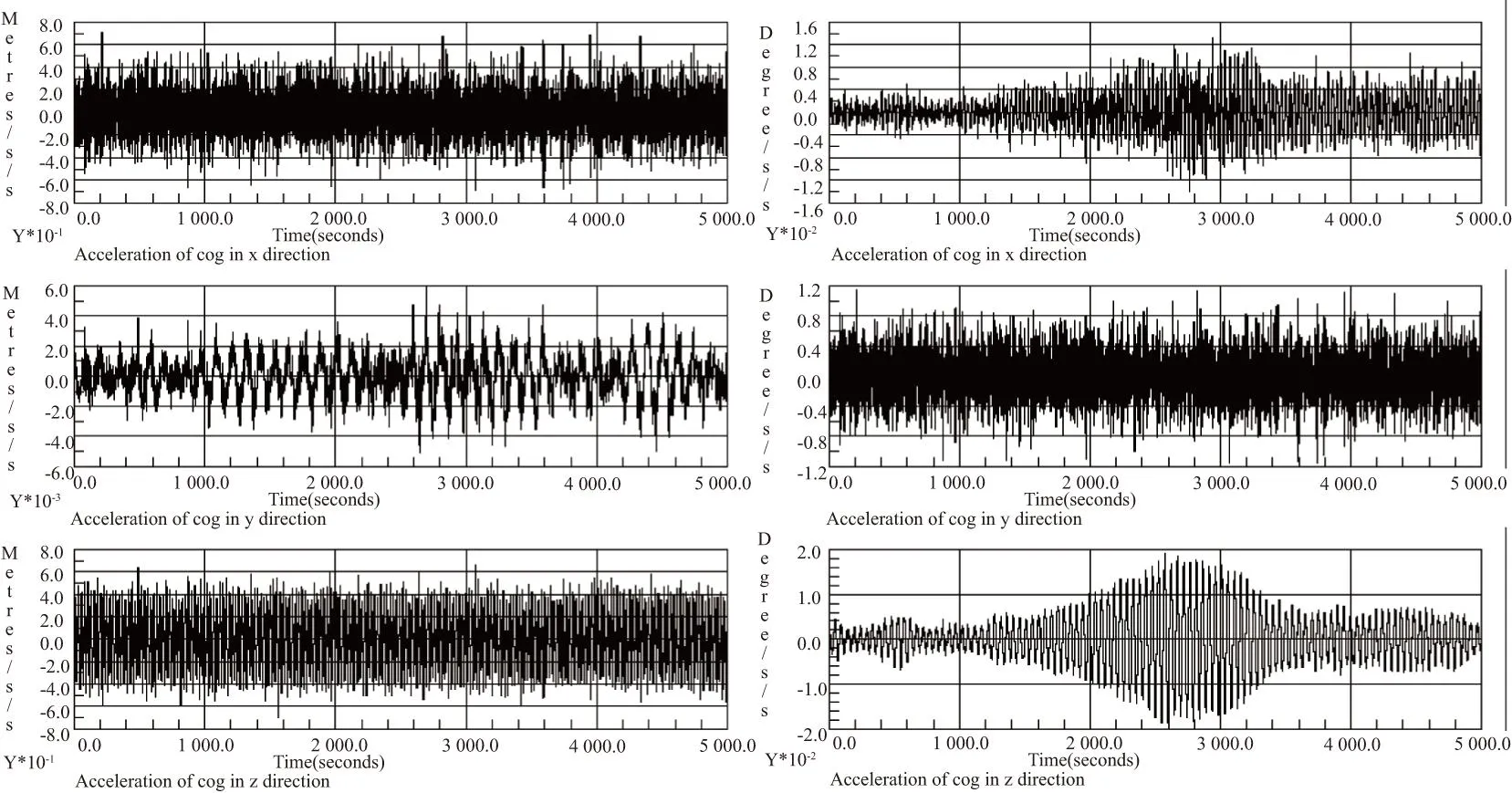
图5 船体重心时间历程加速度曲线
3) 系泊线受力分析
表4为系泊线张力统计表,图6为每根系泊线的受力曲线,图7为系泊线张力统计图。由于风载、浪载、流载是沿x轴正向施加的缘故,系泊线1和系泊线8的受环境合力最大,又因系泊线的布置是沿坐标原点左右上下对称的,所以8根系泊线的受力情况也应该两两相似,由系泊线张力统计图中可以看出,结果符合理想趋势,迎浪方向的系泊线1、系泊线2、系泊线7、系泊线8安全因子要比背浪方向的系泊线3、系泊线4、系泊线5、系泊线6安全系数低。

表4 系泊线张力统计表
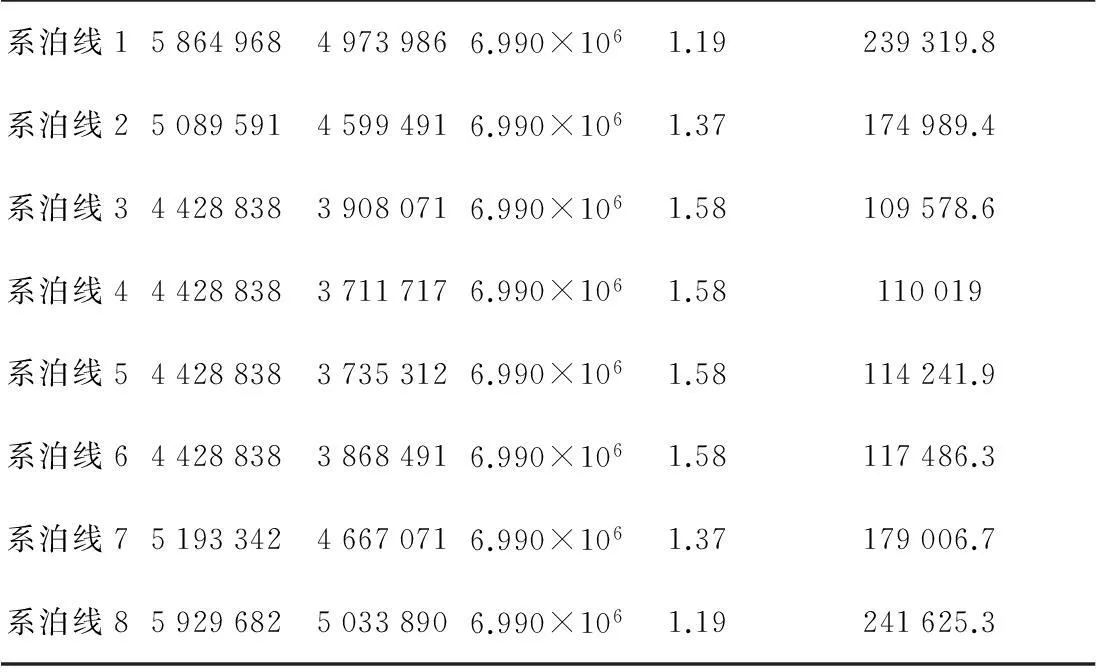
续表4

图6 系泊线时间历程受力曲线

图7 系泊线张力统计
5结论
1) 掌握系泊线动力学的建模方法和风、浪、流环境载荷谱的变化规律,选用专业水动力分析软件ANSYS/AQWA,能够充分考虑海洋环境以及海洋结构物之间的相互作用,实时分析浮体在风浪流联合作用下引起的弯矩、剪力和扭矩,建立风、浪、流随其特征参数在空间和时间区域内的表述模型,阐明其对半潜式平台动态特性的影响机制。
2) 能够实时反映复杂工况和环境载荷下半潜式平台重心6个自由度方向的位移、速度、加速度以及系泊线张力等性能,找出平台在6个自由度方向的动力响应对平台稳定性的影响程度以及布锚方式对系泊线张力分布的影响。
3) 通过对目标平台和锚泊系统进行水动力分析,为深水锚泊定位系统时域耦合分析提供基础方法,进而指导设计及施工,并能够进一步为平台的安全性能,运营管理提供模型和数据支持。
参考文献:
[1] Korkut M D and Hebert E J.Some notes on static anchor chin curves[C]. OTC,1160,1970,4.
[2] Ractliffe A. F. The validity of quasi-static and approximate figuree in the context of cable and flexible riser dynamics.BOSS,1985.
[3] 郝春玲,滕斌. 不均匀可拉伸单锚链系统的静力分析[J] .中国海洋平台,2003,04:18-21.
[4] 孙金丽,张慧池,汤小霞,等. 波浪作用下锚泊系统动力响应的数值模拟[C]. //中国造船工程学会近海工程学术委员会2007年度海洋工程学术会议论文集.2007:343-351.
[5] 周素莲,聂武,白勇,等. 深水半潜式平台系泊系统设计研究[J]. 船舶力学,2010,14(5):495-502.
[6] 翟钢军,唐东洋,刘琨,等. 风浪联合作用下深水半潜式平台运动响应模型试验研究[J]. 中国海洋平台,2011,26(6):43-48.
[7] 宋安科. 深水半潜式钻井平台系泊系统方案设计与分析[D]. 哈尔滨:哈尔滨工程大学,2008.
[8] 孙金伟. 深水Spar平台水动力性能和运动响应数值研究[D]. 青岛:中国海洋大学,2010.
Research on Dynamic Response of Deepwater Semi-submersible Mooring System
LI Ya-nan1, QIN Gang1, TANG Wen-xian1, ZHANG Jian1, ZHANG Zong-zheng1
(1. School of mechanical engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China;
2. Wuhan Marine Machinery Co., Ltd., Wuhan 430084, China)
Abstract:A deepwater semi-submersible drilling platform that works in the depth of 1500 meters is studied in this paper. The expression model for wind, wave and flow along with their characteristic parameters in space and time is established. The time-domain coupled analysis of the mooring system of this platform is carried out, and the impact of the platform’s dynamic response in the directions of six degrees on the platform’s stability and the effect of different anchoring methods on the tension distribution of mooring lines are gained. These results can provide a foundation for time-domain coupled analysis of deepwater anchor mooring positioning system and give further model and date support to the platform’s safe operation.
Keywords:semi-submersible drilling platform; stability; time-domain coupled analysis
收稿日期:2013-10-21
中图分类号:P75
文献标志码:B
文章编号:1671-5276(2015)01-0209-05
作者简介:李亚男(1988-),女,山东潍坊人,硕士研究生,主要从事船舶海洋工程装备CAD/CAE技术研究。
基金项目:2013年江苏省研究生培养创新工程(CXLX13_702)
猜你喜欢
山东冶金(2022年3期)2022-07-19 03:24:42
数学物理学报(2021年5期)2021-11-19 07:01:32
数学物理学报(2021年5期)2021-11-19 07:01:16
石油沥青(2021年4期)2021-10-14 08:50:44
矿产勘查(2020年9期)2020-12-25 02:54:06
数学物理学报(2018年5期)2018-11-16 05:49:58
数学物理学报(2018年1期)2018-03-26 08:16:44
厦门理工学院学报(2016年1期)2016-12-01 04:50:51
现代防御技术(2016年1期)2016-06-01 12:13:27
中国合理用药探索(2014年1期)2014-03-11 20:30:15