
界面混响对柱形水声换能器工作深度的影响分析*
2015-03-14 12:32王小宁张国龙
舰船电子工程 2015年10期
王小宁 张国龙
(91388部队93分队 湛江 524022)
界面混响对柱形水声换能器工作深度的影响分析*
王小宁 张国龙
(91388部队93分队 湛江 524022)
柱形水声换能器作为各类海洋水声设备的关键部件得到广泛应用。对于垂直指向性开角一定的柱形水声换能器,当在浅水和接近海底条件下使用时,海面和海底的界面混响将对其信号接收检测产生严重干扰,是决定其工作深度范围的主要因素。文从界面混响理论入手,对柱形水声换能器在浅水和接近海底条件下界面混响进行理论分析和仿真计算,定量分析对工作深度范围的影响。
柱形水声换能器; 界面混响
Class Number U666.7
1 引言
柱形水声换能器凭借辐射面积大、对称性好、结构简单、机械品质因数低、径向耐静水压性能好等优点[1],在水声计量和军用、民用各类海洋水声设备中广泛应用。对于具有一定垂直指向性、利用宽脉冲信号进行工作的收发共用的柱形水声换能器,当其在接近海面或海底工作时,海面混响和海底混响是换能器接收目标回波信号的主要干扰[2],影响设备对目标信号的正常检测,严重时会导致设备无法正常工作。因此,定量分析计算柱形水声换能器在距离海面或海底不同深度工作时的混响强度,有利于为水声设备选择适合的工作深度范围,确保正常工作,而且有利于柱形水声换能器设计时指向性开角指标的确定。
本文对柱形水声换能器在接近海面和海底工作时的海面混响和海底混响进行理论分析和仿真计算,定量评测界面混响对柱形水声换能器工作深度的影响。
2 仿真模型
假设有某收发共用的柱形换能器,水平指向性开角为360°,垂直指向性开角为±30°。将换能器按图1所示布放入水,其中心轴线与海面和海底垂直,海面、海底与换能器中心点距离为H、H′。
当该换能器发射一定频率、一定源级,脉宽为600ms的脉冲信号后,声波经过一定时间到达海面或海底,经海面、海底反射后沿原路返回,到达换能器并被接收。如图1所示,假设不同路径上介质对声传播的影响相同,则同一时刻声波传播到海面或海底并被反射时,反射点在海面和海底上为圆形分布。初时刻该圆上任一点到换能器声学中心连线长度为R,与水平面夹角为θ,经过时间t后,反射点到换能器声学中心连线长度为R′,与水平面夹角为Ф。对应的其在海面和海底上投影成两个同心圆,半径分别为r、r′,产生混响的区域投影就是两圆形成的圆环[3~4]。

图1 某柱形换能器在接近海面和海底工作时的混响模型
3 理论分析及数学模型
3.1 界面混响理论
对于理想指向性图的换能器,其界面混响级公式如式(1):
RL=SL-2TLr+S+10logA
(1)
式中SL为发射信号声源级,RL为混响级,TLr为混响的传播损失,S为界面混响的散射强度,A为混响面积。由声波的球面扩展损失公式TLr=20logr,带入式(1)可得[5]:
RL=SL-40logr+S+10logA
(2)
式中r为声波从换能器声学中心传播到海面某点的距离。
对于海面和海底其界面混响的散射强度S是不同的,下面将分别在这两种情况下进行讨论。
3.2 海面混响的散射强度和计算公式
在不考虑风速、频率和海面粗糙度等因素影响和掠射角较小(一般小于60°)的情况下,可以使用Marsh、Schulkin和Kneale等对于粗糙表面上的返回声源方向的散射强度公式[6~8]:
式中Ss为海面混响散射强度,θ为掠射角,g为重力加速度,A2(ω)为以圆频率ω表示的海面起伏的“功率”谱。如果取A2(ω)=7.4×10-3g2ω-5,则可以导出以下公式:
Ss=-36+40logtanθ
(3)
由式(3)可以看出Ss一般随入射声束与散射界面之间的夹角θ(大小等于掠射角)而变,若换能器位于散射界面之上或之下一定距离,则在发射脉冲后,Ss随距离或时间而变。
将式(3)带入式(2)得到式(4):
RL=SL-40logr+(-36+40logtanθ)+10logA
(4)
3.3 海底混响的散射强度和计算公式
针对深水海底,当声波掠射角小于45°时,Lambert定律是散射强度和角度之间符合得比较好的近似公式。Mackenzie根据大量实测数据得出在不同海域不同频率下的Lambert定律关系式[9~10]为式(5):
SB=10logμ+10logsin2θ
(5)
式中10logμ根据Mackenzie等实验数据曲线平均值约为-29dB。则式(5)可简化为式(6):
SB=-29+10logsin2θ
(6)
将式(6)带入式(2)得到式(7):
RL=SL-40logr+(-29+10logsin2θ)+10logA
(7)
4 仿真计算及结果分析
4.1 海面混响仿真计算及结果分析
对于仿真模型中柱形换能器布放深度H分别取3m、5m、10m和30m,根据式(2)和式(4)进行仿真计算。为了计算方便和图形直观显示,先计算式(2)右边后三项(-40logr+S+10logA),以-2TL+S+10logA表示,然后再计算混响级RL。仿真计算结果如图2所示。

图2 海面混响仿真结果
对于发射源级为185dB的脉冲信号,由图2可知,当-2TL+S+10logA达到稳态时,可得到表1中的计算结果。
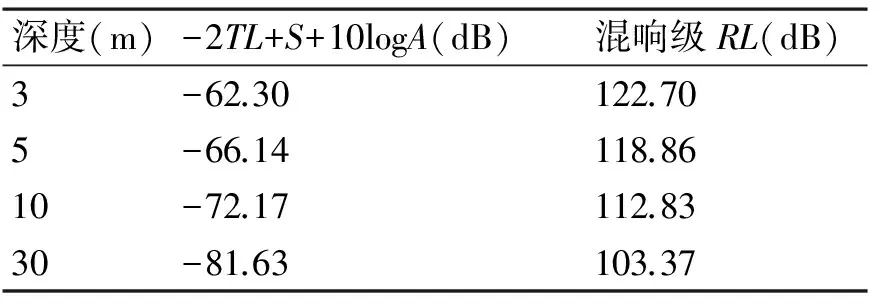
表1 海面混响计算结果
假设水声设备的接收灵敏度为120dB,垂直指向性开角为±30°,那么在柱形换能器布放深度小于3m情况下发射并接收600ms脉冲信号时,由于海面混响级高于系统接收灵敏度,目标回波信号将淹没在海面混响杂波中而无法正常检测;对于布放深度5m的情况,虽然混响级低于系统接收灵敏度,但差距较小,在实际使用过程由于换能器本身指向性和海况等因素不是理想状况,目标回波信号被正常检测出的概率比较低。因此,从水声设备可靠使用方面考虑,一般应规定柱形换能器工作深度大于10m。
4.2 海底混响仿真计算及结果分析
对于仿真模型中换能器声学中心到海底的距离H′分别取3m、5m、10m和30m,根据式(2)和式(7)进行仿真计算,为了计算方便和图形直观显示,先计算式(2)右边后三项(-40logr+S+10logA),以-2TL+S+10logA表示,然后再计算混响级RL。仿真计算结果如图3所示。
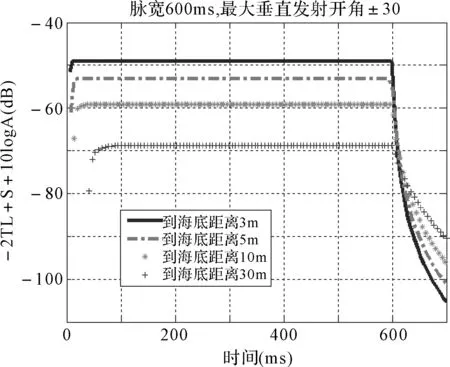
图3 海底混响仿真结果
对于发射源级为185dB的脉冲信号,由图3可知,当-2TL+S+10logA达到稳态时,根据计算数据可得到以下结果:
假设水声设备的接收灵敏度为120dB,垂直指向性开角为±30°,那么在柱形换能器换能器声学中心与海底距离小于30m情况下发射并接收600ms脉冲,由于海底混响级高于系统接收灵敏度,目标回波信号将淹没在海底混响杂波中而无法正常检测。因此,从水声设备可靠使用方面考虑,一般应规定柱形换能器距离海底距离要大于30m。

表2 海底混响计算结果
5 结语
本文通过理论分析和案例仿真计算,定量分析了界面混响对柱形水声换能器工作深度的影响,为类似水声设备选择适合的工作深度范围提供了依据,同时也为具有垂直指向性开角的柱形水声换能器的设计提供了参考。
[1] 刘孟庵,连立民.水声工程[M].杭州:浙江科学技术出版社,2002:94-96.
[2] 李启虎.声呐信号处理引论[M].北京:海洋出版社,1985:113-119.
[3] 顾金海,叶学千.水声学基础[M].北京:国防工业出版社,1981:166-177.
[4] R.J.尤立克[美].水声原理[M].北京:国防工业出版社,1972:197-238.
[5] Urick, R. J., R. M. Hoover. Backscattering of Sound from the Sea Surface: Its Measurement, Causes, and Application to the Prediction of Reverberation Levels[J]. J. Acount. Soc. Am.,1956,28:1038.
[6] Marsh, H. W. Exact Solution of Wave Scattering by Irregular Surface[J]. J. Acoust. Soc. Am.,1961,33:330.
[7] Marsh, H. W., M. Schulkin, S. G. Kneale. Scattering of Underwater Sound by the Sea Surface[J]. J. Acoust. Soc. Am.,1961,33:334.
[8] Marsh, H. W. Sound Reflection and Scattering from the Sea Surface[J]. J. Acoust. Soc. Am.,1963,35:240.
[9] Mackenzie, K. V. Bottom Reverberation for 530 and 1030 cps Sound in Deep Water[J]. J. Acoust. Soc. Am.,1961,33:1498.
[10] Schmidt, P. B. Monostatic and Bistatic Backscattering Measurements from the Deep OceanBottom[J]. J. Acoust. Soc. Am.,1971,50:327.
Impact Analysis of Interface Reverberation on Cylindrical Acoustic Transducer Working Depth
WANG Xiaoning ZHANG Guolong
(Unit 93, No. 91388 Troops of PLA, Zhanjiang 524022)
The cylindrical acoustic transducer is widely used in all kinds of underwater acoustic equipments as key components. The working depth range of cylindrical acoustic transducer is determined by the interference of interface reverberation receiving signal detection when it is used in shallow and near the bottom of the sea to the cylindrical acoustic transducer with a certain vertical open angle. In this paper, the interface reverberation to cylindrical acoustic transducer is simulated and the influence to the working depth range is quantitatively analyzed.
cylindrical acoustic transducer, interface reverberation
2015年4月7日,
2015年5月26日
王小宁,男,工程师,研究方向:水声信号处理。
U666.7
10.3969/j.issn.1672-9730.2015.10.042
猜你喜欢
电声技术(2022年4期)2022-06-15
中华养生保健(2022年10期)2022-05-23
哈尔滨工程大学学报(2021年3期)2021-05-08
中华养生保健(2020年9期)2021-01-18
作文成功之路·小学版(2020年9期)2020-10-28
科技传播(2019年21期)2019-11-12
科技风(2019年17期)2019-10-21
人大建设(2018年11期)2019-01-31
舰船电子工程(2018年11期)2018-11-26
水下无人系统学报(2018年5期)2018-11-09
