
一种船舶姿态控制系统样机方案设计*
2015-03-14 09:26胥文清
舰船电子工程 2015年6期
胥文清
(中国舰船研究设计中心 武汉 430064)
一种船舶姿态控制系统样机方案设计*
胥文清
(中国舰船研究设计中心 武汉 430064)
船舶在高速航行状态下的耐波性易受到波浪影响,姿态控制系统是提高船体在高速航行状态下耐波性的重要手段,论文提出一种穿浪双体船姿态控制系统样机设计方案,该系统的控制附体包括T型水翼和两个压浪板,控制附体均采用液压方式进行控制,并实现了样机研制,验证了方案的可行性,为船舶姿态控制系统研制提供参考。
姿态控制; 控制附体; 液压控制
Class Number U666
1 引言
船舶在高速航行状态下的耐波性易受到波浪影响,高性能船舶如穿浪船是近年来国际上应用越来越一种新船型,由于穿浪船艏部的特殊线型,其具有较好的适航性,但是在不断使用过程中,其耐波性在短波峰,尤其在波长与船长之比为1~1.5左右的波峰中航行时,耐波性难以令人满意[1~3]。改善穿浪双体船的耐波性显得尤为重要,目前采用T型翼,压浪板,艉插板等附体来[4~5]解决高速船问题。国外对于姿态控制系统的研究和应用开展大量的工作并在工程应用,如瑞士HUMPHREE公司开发姿态控制系统(Trim and stabilization systems),由组合式艉插板、执行电机、姿态传感器等组成,能改善船舶的耐波性能,国内关于姿态控制系统[6]的研究尚处于起步阶段,本文提出了一种穿浪双体船姿态控制系统样机设计方案,该方案的控制附体包括T型水翼和压浪板,控制附体均采用液压方式进行控制,本文给出了系统及各组成部分的方案,并实现了样机研制,验证了方案的可行性,为船舶姿态控制系统研制提供参考。
2 系统总体方案
姿态控制系统样机主要由姿态传感器、航行控制器、显示控制单元、液压系统、T型水翼和两套压浪板以及电源辅助设备等组成。其中姿态传感器用于测量船舶纵摇、横摇、加速度等运动姿态信息。航行控制器用于实时接收姿态传感器测量的姿态信息及液压系统反馈的T型水翼和压浪板的角度、位置及系统状态信息,同时执行运动控制计算,输出运动控制指令给液压系统。显示控制单元用于实时显示传感器姿态,执行机构位置状态以及系统状态信息,同时实现对T型水翼和压浪板的收放控制。液压系统由电控箱和液压泵组构成,接收航行控制器的运动控制指令,驱动T型水翼和压浪板运动。T型水翼布置在船的艏部中央位置,包括固定水翼和活动尾翼,压浪板用于布置穿浪双体船的艉部两侧。同时为了验证样机工作正确性,本系统另外配置了一套三自由度转台,传感器固定在三自由度转台上,姿态控制系统样机组成如图1所示。

①:姿态传感器;②:航行控制器;③:三自由度转台;④:压浪板(左、右各1);⑤T型水翼图1 姿态控制系统组成框图
3 航行控制器
航行控制器作为样机重要组成部分,航行控制器控制处理模块为一块集成有控制软件的功能板卡,主要实现对姿态传感器、液压系统传感器信号的采集,通过采集获得姿态传感器的俯仰、横摇、航向角、三轴加速度和角速度信号和内部集成的控制算法,计算得到T型翼和压浪板的控制信号,输出T型翼转角控制信号和左、右压浪板转角控制信号。航行控制器与姿态传感器和液压系统通过电气连接。
航行控制器主要由微处理器模块、RS232通信模块、电源模块、电流输入调理模块、模数转换模块、数模转换模块、电流输出模块等组成。航行控制器信号流程如图2所示。
4 液压控制系统
液压控制系统[7]主要实现T型翼和压浪板角度的跟随控制,液压控制系统主要由电动机、液压泵组、伺服控制器、伺服放大器、液压缸、电磁阀、传感器以及液压管路[8]等组成。T型翼和压浪板控制系统分为两个独立的闭环系统,伺服控制器采用PLC为处理器的控制方式,选用西门子CPU315系列的处理器,其最快处理浮点数指令可达3μs,接收航行控制器发送的T型翼和压浪板动作的角度信号,通过安装在T型翼和压浪板执行器角度传感器检测实际的角度值,伺服控制器通过对给定角度值和测量角度值的比较通过一定的算法来控制电液伺服阀的驱动电流的大小,电液伺服阀根据电流的大小来控制油的流量,推动液压缸进行伸缩动作,从而推动T型翼襟翼和压浪板的摆动。本方案中T型翼具备回收功能,通过两个电磁阀推动两个液压缸来实现收放,液压控制系统由T型翼和压浪板控制功能框图分别如图3和图4所示。
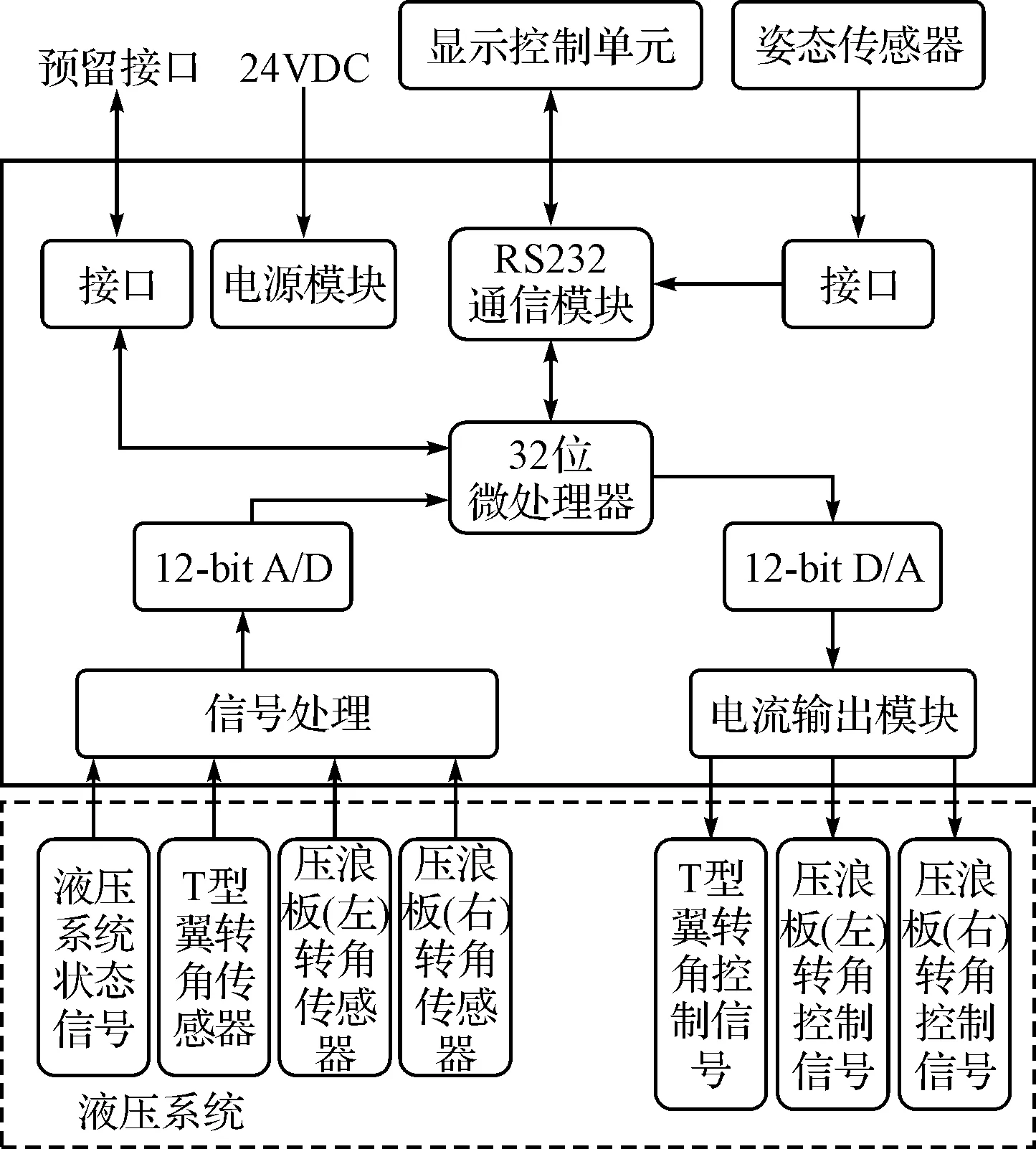
图2 航行控制器信号流程框图
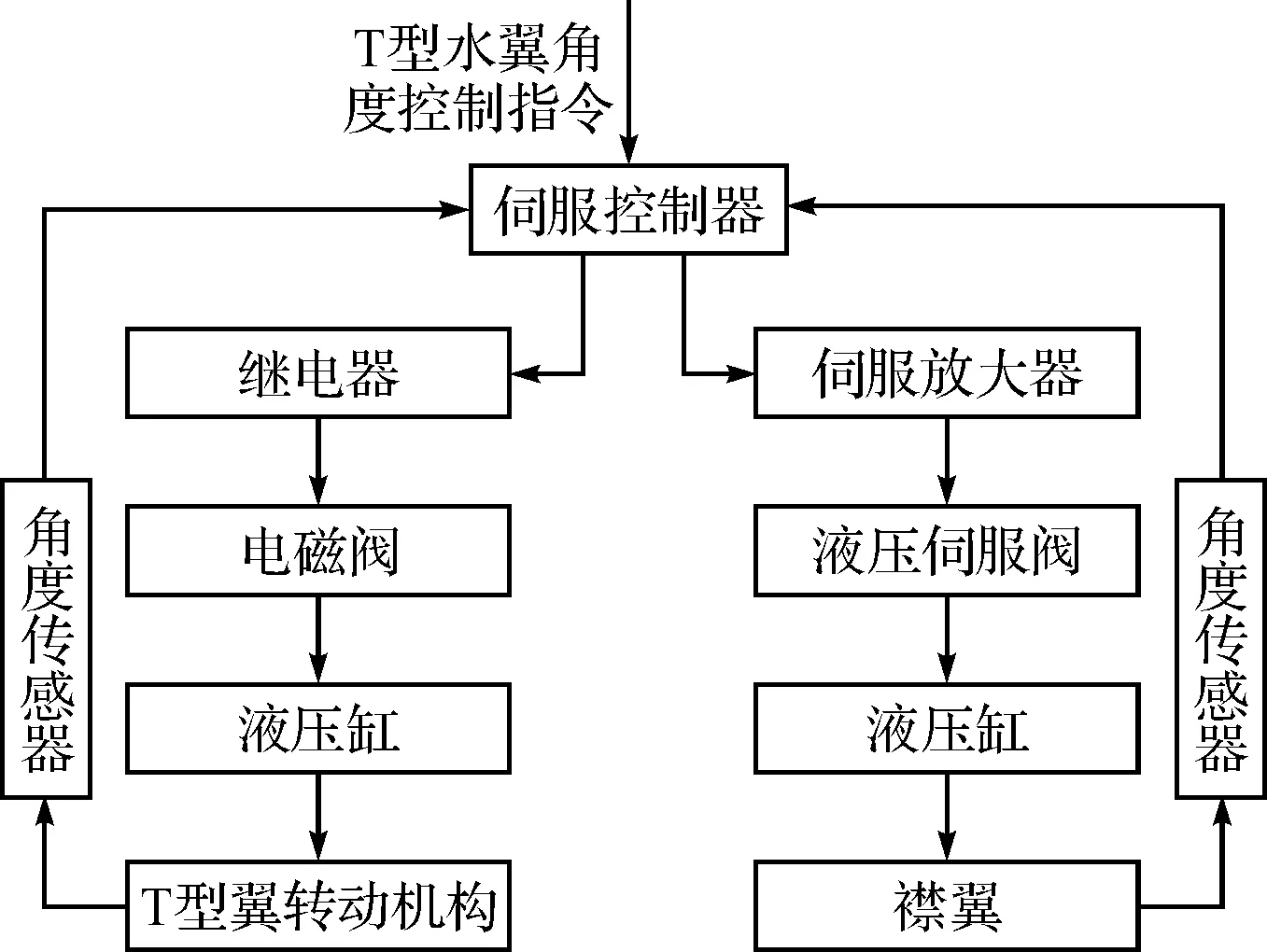
图3 T型水翼液压控制框图

图4 压浪板液压控制框图
液压控制系统采用PID控制算法[9~10],通过将给定值与检测值测量的跟随曲线来调整响应参数的整定值PID控制算法主要用软件中SFB41功能块实现,SFB41模块用于连续系统的PID控制,只需设置相关的参数即可,实现非常简单,液压控制系统PID控制流程如图5所示。
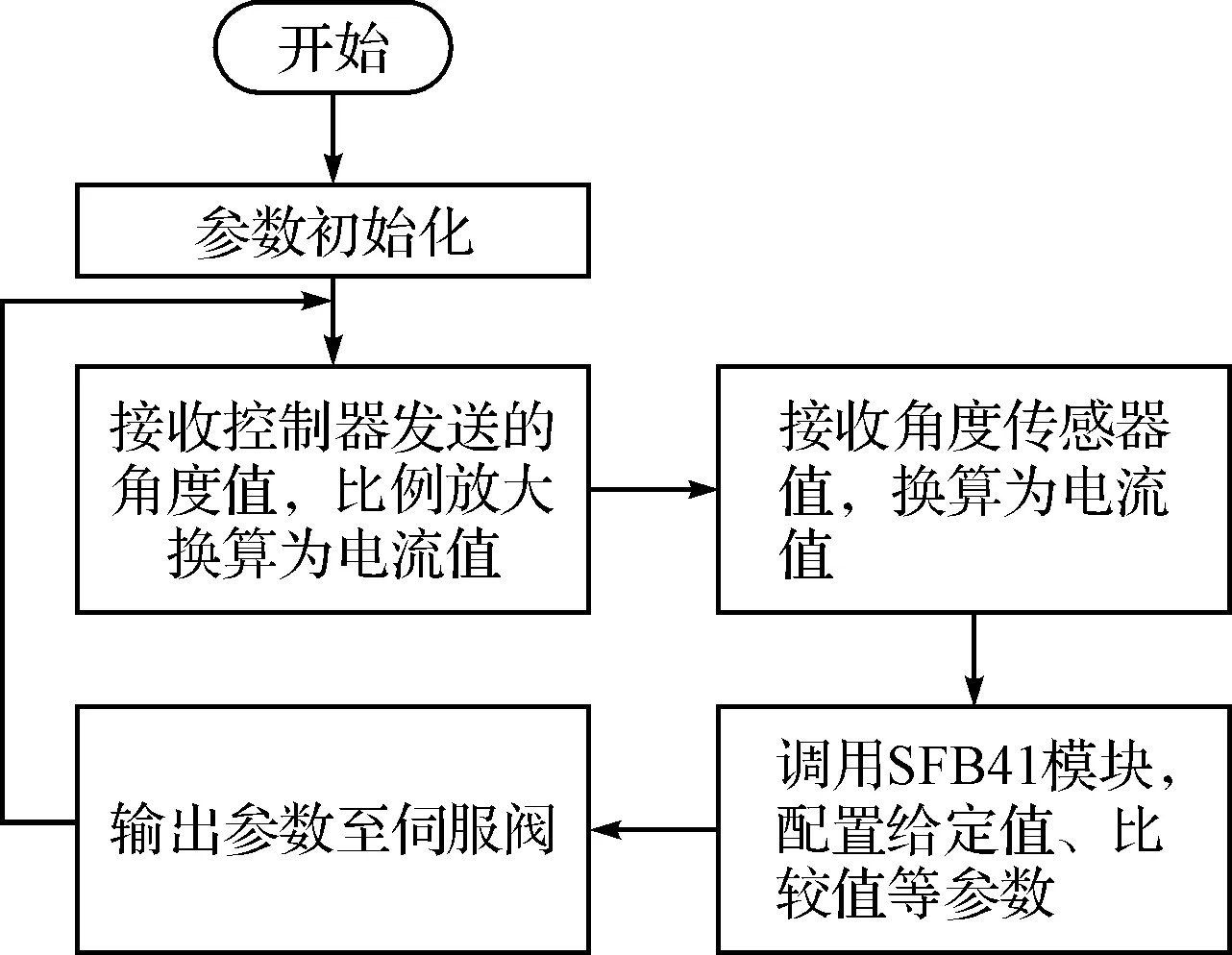
图5 液压控制程序流程图
5 结构设计
5.1 T型翼结构设计
T型翼是由襟翼、固定翼、垂直翼、传动杆、角度传感器、两台液压缸、伺服缸、回收机构以及框架等部件组成,伺服缸上装有电液伺服阀,T型翼通过传动轴与吊架形成转动环节,伺服缸活塞推动传动感,而在与襟翼相固接的传动轴上装有铰链,襟翼上的传动轴与T翼下部的轴孔形成回转。当襟翼工作时,垂直翼处于垂直位置,上部两台液压缸分别由两只液压锁锁紧,使T型翼保持垂直位置不变。当向电液伺服阀输入正向电流时,伺服缸中的活塞杆带动传动感向上运动,使襟翼向下摆动,其摆动角度由角度传感器检测,并由电气控制系统组成闭环控制,使襟翼的摆动角度随输入信号相适应。当向电液伺服阀输入反向电流时,襟翼便向上摆动,其角度控制方式与上述相同。当襟翼的摆动工作完成后,首先是T翼左端液压缸活塞杆完全伸出,T翼通过其上部回转轴,使其向右侧收回一定的角度;然后T翼右端液压缸活塞杆伸出,使T翼进一步收回;当T翼收至水平位置时,安装在T翼上部回转轴上的压杆,触动行程开关,使T翼右端液压缸活塞杆停止运动,并由液压锁锁紧。T型翼结构示意图如图6所示。
5.2 压浪板结构设计
压浪板是由压浪板体、传动轴、支座、伺服缸、电液伺服阀以及角度传感器等部件组成,压浪板体通过传动轴安装在支座上,构成转动环节,在传动轴的一端安装有角度传感器;伺服缸上装有电液伺服阀。当向电液伺服阀输入正向电流时,伺服缸中的活塞杆带动压浪板向上摆动,其摆动角度由角度传感器检测,并由电气控制系统组成闭环控制,使压浪板体的摆动角度与输入信号相适应。当向电液伺服阀输入反向电流时,压浪板体便向下摆动。压浪板结构图如图8所示。

图6 T型翼放下状态

图7 T型翼回收状态

图8 压浪板结构图
6 结语
针对穿浪双体船在高速航行状态下的耐波性易受到波浪影响问题,本文提出了一种穿浪双体船姿态控制系统样机设计方案,姿态控制系统样机主要有姿态传感器、航行控制器、显示控制单元、液压系统、T型水翼和两套压浪板组成,本文给出了系统及各组成部分的方案,并实现了样机研制,验证了该方案的可行性,为船舶姿态控制系统研制提供参考。
[1] 卢晓平,黄衍,石仲.穿浪双体船兴波阻力研究[J].船舶工程,1999(4):5-9.
[2] 董文才,夏翔,左文锵,等.高速轻型穿浪双体船型及性能试验研究[J].中国造船,2008,49(3):118-26.
[3] 张晓阳,李铁骊,林焰.穿浪双体船阻力性能预报与模型试验分析[J].大连理工大学学报,2009,49(3):396-400.
[4] 蔡新功.加装组合减摇附体纵向运动研究[D].哈尔滨:哈尔滨工程大学硕士学位论文,2000.
[5] 李积德.船舶耐波性[M].哈尔滨:哈尔滨船舶工程学院出版社,1992.
[6] 杨盐生.舰船运动控制研究[J].交通运输工程学报,2003(3):34-39.
[7] 王春行.液压控制系统[M].北京:机械工业出版社,2004.
[8] 黎启柏.液压元件手册[M].北京:机械工业出版社,1998.
[9] 梅生伟,等.现代控制理论与应用[M].北京:清华大学出版,2003.
[10] 陶永华,尹怡欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,2000.
Scheme Design of A Ship Ride Automatic Control System
XU Wenqing
(China Ship Development and Design Center, Wuhan 430064)
As the ship seakeeping characteristics is easily affected by storm at high speed, and ride automatic control system is an important device for improving the ship seakeeping characteristics, the paper proposes a scheme of ride automatic control system. The control appendage of the system comprises one T-foil and two trim-tab, using hydraulic control mode. The paper implements the system manufacture, validating the feasibility of the scheme, providing a reference for study or manufacture for ride automatic control system.
ride automatic control, control appendage, hydraulic control
2014年12月1日,
2015年1月17日
胥文清,硕士,工程师,研究方向:舰船电子信息,自动控制。
U666
10.3969/j.issn1672-9730.2015.06.039
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
疯狂英语·新读写(2021年6期)2021-08-05
儿童故事画报(2020年7期)2020-08-03
房地产导刊(2020年6期)2020-07-25
小学科学(2020年6期)2020-06-22
计算机与网络(2018年4期)2018-09-10
中国计算机报(2018年20期)2018-08-28
创新作文(1-2年级)(2017年7期)2017-12-26
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年3期)2016-02-27
