
基于磁阻传感器的磁罗经实验室训练方法改进设计*
2015-03-14 10:55陈伟张源
舰船电子工程 2015年8期
陈 伟 张 源
(海军蚌埠士官学校航海教研室 蚌埠 233012)
基于磁阻传感器的磁罗经实验室训练方法改进设计*
陈 伟 张 源
(海军蚌埠士官学校航海教研室 蚌埠 233012)
利用磁阻传感器感知磁航向,对此航向加入误差模拟电罗经航向,磁罗经与此航向比对,模拟实际工作环境中磁罗经与电罗经比对测定消除磁罗经自差,解决了实验室无法进行此项目相关教学训练的问题。
磁阻传感器; 磁罗经; 实验室
Class Number U666
1 引言
利用舰艇上电罗经航向作为基准航向,与磁罗经比对得出磁罗经自差大小并以“爱利法”为基础进行自差消除的方法,相对于传统方法,具有不受天气、海域限制等优势,是一种常用的磁罗经自差消除方式[1~2]。该方法在院校教学中,受场地、电罗经保障等因素制约,一直缺乏有效的措施进行该项目的教学与实作训练。磁阻传感器具有敏感当地磁场方向的作用,在磁罗经数字化改造方面已被广泛使用[3~4],将其安装在磁罗盘上,能够敏感出磁罗经磁罗盘处磁航向数值,磁罗盘读数与磁阻传感器敏感数值相同。利用磁阻传感器这一性能,本文提出将磁阻传感器给出的数值进行相关误差处理,以处理后的航向模拟电罗经航向,使磁罗经可以进行航向比对,实现了课堂教学与训练应用。
2 实验方法及功能
航向比对法是一种常用的磁罗经自差测定方法,是通过比对电罗经与磁罗经航向来测定自差的方法,为自差消除提供自差数据。在消除自差过程中,利用舰艇上电罗经航向来进行磁航向航行,其中电罗经航向由所要航行的磁航向、当地磁差和电罗经差推算得出,用公式表示:电罗经航向=磁航向+磁差-电罗经差。磁差是从海图上取得的,电罗经差可以在过叠标线时测定。航向比对法实施过程中需要电罗经保障,在实验教学中收到实验室场地与电罗经保障的制约,难以有效开展此项目教学训练。针对电罗经保障限制,本设计主要通过“电罗经航向模拟系统”进行电罗经航向的模拟;通过“船舶转向模拟系统”解决了场地限制问题[5],实现了在实验室此项目教学训练。
3 系统的组成和功能实现
本设计硬件组成及功能如图1,通过磁阻传感器来敏感磁场,经过信号放大、A/D转换及键盘装入的数据后,经单片机处理后所得的航向,作为模拟的电罗经航向,进行磁罗经航向比对的依据[1,3]。其中磁阻传感器是基于磁阻效应原理工作的,利用磁阻效应可高灵敏度地检测外界磁场强度的大小和方向。采用两轴磁阻传感器来直接敏感磁场,磁阻传感器输出X轴和Y轴二路相对应的感应电压,经磁阻传感器电路处理后,输出X轴和Y轴二路感应直流电压信号。这两路信号输入到A/D转换器的输入端。A/D转换器将二路输入的直流电压信号分别转换为12位数字信号,结果送入单片机处理。按照编制的程序,计算Y轴和X轴信号Vy和Vx的正切值,可获得船舶的真实磁航向,将真实磁航向经键盘加入误差后,作为模拟电罗经航向数值并显示,得到待比对的航向。
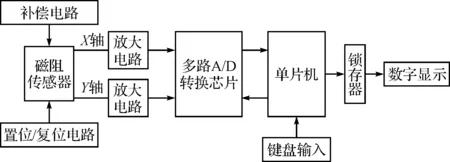
图1 系统的硬件组成
3.1 模拟舰艇转向的实现
利用“爱利法”消除磁罗经自差,需要先后在四个基点及两个相互垂直的隅点磁航向上进行,在进行实际航行训练时,只需要调整船艇的航向即可带动磁罗经随之转向。在实验室后实现磁罗经的航向变化,通常采用在磁罗经基座下安装一个360°全方位回转的平台的方法解决,在自差消测过程中,当需要船艇转向的时候,只需手动转动罗经主体,即可模拟出磁罗经随船艇转向的效果。
3.2 模拟电罗经航向的实现
在实验室,磁阻传感器感应所得到的航向为不含自差的罗航向,即为真实的磁航向。考虑到相应航向存在的自差,采用人为加入误差后的航向,作为电罗经航向,电罗经航向数值由真实磁航向、当地磁差及电罗经误差三个因素决定,即公式:电罗经航向=磁航向+磁差-电罗经误差,此处的磁航向为需要航行的磁航向,如0°、90°,带入公式便可得电罗经航向,所得的电罗经航向用于模拟舰艇的真实航向,为航向比对的基准。为了教学训练更贴近实际情况,当地磁差及电罗经误差可采用磁罗经自差消除时的一组真实数据,通过键盘选择已装订在单片机内的多组数据中的一组。
3.3 克服磁铁棒对磁阻传感器的影响的实现
该设计磁阻传感器的信号准确和稳定为模拟电罗经航向的关键,而在消除自差过程中,存在插入的磁铁棒会改变磁阻传感器周围的磁场,导致电罗经的航向发生变化,无法实现实际工作中舰艇稳定的航向的问题。克服磁铁棒对磁阻传感器的影响成为本设计的关键。如图2所示,采用的方法是当电罗经确认进入相关航向后,锁定该航向显示,这样插入的磁棒不会影响电罗经航向显示,当该航向消除完毕后,比对此时磁阻传感器真实值与特定值(含允许的消除误差)之间的关系,并决定是否解锁,以进行下一个航向的消除。以消除C自差为例,首先以磁航向0°航行,0°为解锁航向,消除过程中,当磁阻传感器感应值变为0°时表示该航向消除完毕;然后以180°航行,进入该磁航向后,读取磁阻传感器此时值,与180°取中间值为解锁航向,消除过程中,当磁阻传感器感应值与解锁值相等时表示该航向消除完毕。为了保证正确进入相应磁航向,显示屏上同时显示相关磁差与电罗经差,以便操作人员能计算出相应电罗经航向;当磁阻传感器与特定值相等时,进行一定延时,确认该值稳定后再进行显示器航向显示解锁。
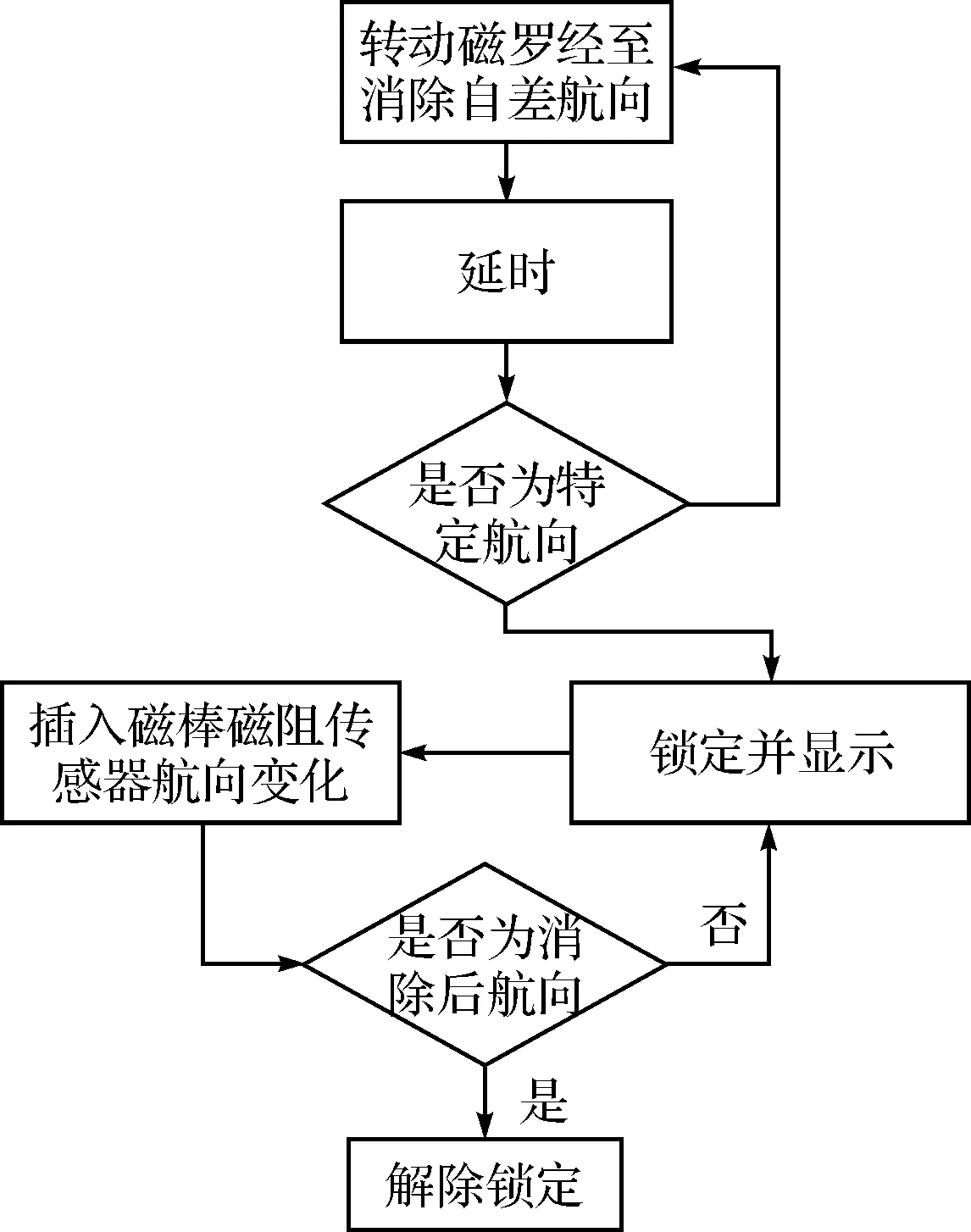
图2 航向显示流程图
4 系统工作过程
磁传感器敏感实验室磁罗经附近磁场信号,经前置放大、A/D转换后送单片机初步处理,得出磁场方向,加入相应航向上人为误差后的得出模拟电罗经航向并显示,同时显示出电罗经误差与磁差值。转动磁罗经使电罗经进入消除自差时舰艇所航行的磁航向,模拟航行,并对该航向进行锁定显示。读取此时的磁罗经航向作为要比对的航向,磁罗经航向与相应磁航向之差即为此航向上磁罗经自差,插入相应硬铁或软铁进行自差消除。当插入磁棒后必然引起磁罗经周围磁场的变化,磁罗盘转动,磁阻传感器感应航向同时发生变化,当磁阻传感器感应航向与所要航行的磁航向相同(走正航向)或为两者中间值(走反航向)时,表示此航向自差消除完成。

图3 系统工作过程流程图
5 结语
本设计在实验室实现了磁罗经航向比对法的消除过程,能满足航向比对法在实验室的教学训练要求,需要注意的是本设计中磁罗经自差为人为设定的自差,并非磁罗经真实存在的自差,与真实工作情况有所不同,仅可模拟真实工作情况,限于教学训练应用。
[1] 钟美达.船用磁罗经校正系统研究[D].哈尔滨:哈尔滨工程大学,2008.
[2] 关政军.航海仪器.上册,船舶导航设备[M].大连:大连海事大学出版社,2009,9:79-81.
[3] 季本山.磁罗经自差的数字化校正法[J].航海技术,2009(6):32-35.
[4] 关政军.数字磁罗经自差自动校正方法[J].大连海事大学学报,2009(8):13-15.
[5] 杨裕浩,韩冰,孟祥黎,等.新型磁罗经自差消测实验室的设计和建设[J].实验室研究与探索,2013(6):206-208.
[6] 周坤芳,由文立.建设磁罗经综合实验室提高磁罗经自差消测能力[J].实验室研究与探索,2006(9):25-27.
[7] 赵柯,石昌金.次罗经自差校正训练的模拟实现[J].船海工程,2008(3):110-113.
[8] 关政军,陈小凤.磁传感器在航海上的应用[J].大连海事大学学报,2006(5):45-47.
[9] 王永龙,等.基于磁阻传感器的弱磁信号采集系统设计[J].传感器与微系统,2008(1):69-71.
[10] 赵圣飞,等.基于单片机的磁强信号检测系统设计[J].仪表技术与传感器,2014(3):58-60.
Improved Design of Magnetic Compass Training Laboratory Based on Magnetic Resistance Sensor
CHEN Wei ZHANG Yuan
(Navigation Teaching and Research Office, Bengbu Naval Petty Officer Academy, Bengbu 233012)
Using magnetic resistance sensor to sense magnetic course, error simulation electric compass course is added, the course is compared with the magnetic course, compass and determination to eliminate the magnetic compass autodyne gyrocompass contrast magnetic actual working environment are simulated, the laboratory cannot carry out this project related training problem is solved.
magnetic resistance sensor, magnetic compass, laboratory
2015年2月11日,
2015年3月24日
陈伟,男,助教,研究方向:航海仪器的教学与科研工作。张源,男,硕士,副教授,研究方向:航海仪器的教学与科研工作。
U666
10.3969/j.issn1672-9730.2015.08.024
猜你喜欢
大电机技术(2022年5期)2022-11-17
舰船科学技术(2022年10期)2022-06-17
防爆电机(2021年6期)2022-01-17
疯狂英语·新读写(2021年6期)2021-08-05
防爆电机(2021年4期)2021-07-28
新世纪智能(高一语文)(2021年3期)2021-07-16
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2018年19期)2018-11-14
