
基于MCGS和FX2N-20GM的双轴伺服系统的研究与开发
2015-03-12 02:06梁生龙珠海城市职业技术学院广东珠海519090
机电工程技术 2015年11期
梁生龙(珠海城市职业技术学院,广东珠海 519090)
基于MCGS和FX2N-20GM的双轴伺服系统的研究与开发
梁生龙
(珠海城市职业技术学院,广东珠海519090)
摘要:以FX2N-20GM为核心运动控制器,结合三菱PLC、MCGS触摸屏和台达伺服驱动器,设计了一套双轴伺服系统,对双轴伺服系统的硬件结构和软件程序进行了详细阐述。通过试验,该控制系统精度较高,开放性、通用性和扩展性较好,可以广泛应用于工程技术领域。
关键词:FX2N-20GM;定位模块;伺服系统;PLC;MCGS
0 前言
近年来,现代工业对运动控制的要求越来越高,伺服运动控制技术的应用也越来越广。在机械、设备等相关领域各种运动部件的速度控制、运动轨迹控制都是依靠各种伺服系统来完成,如数控机床的X-Y轴控制、医疗器械X光机、机器人、平行缝焊机等。伺服系统为工业生产率及其自动化水平的提高作出了重要贡献。目前市场上大都是封闭式的数控系统,不能适应用户对设备的开放性、互换性、通用性和扩展性的需要,为了能够适应市场对伺服系统的需要,基于MCGS触摸屏和FX-20GM研究开发了双轴伺服系统,可以广泛应用于工程技术领域。
1 双轴伺服系统的硬件设计
整个系统主要由机械部分和电气部分组成。机械部分有工作台、滚珠丝杆、电机支架组成。电气部分主要由MCGS触摸屏、PLC (FX3U-48MT)、定位模块(FX2N-20GM)、台达交流伺服驱动器、自带高精度编码器的伺服电机等组成。双轴伺服系统总体结构如图1所示。
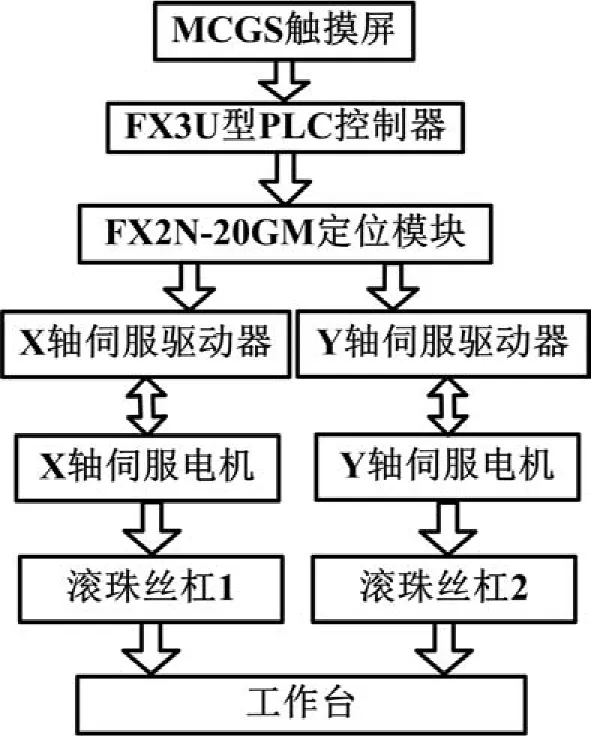
图1 双轴伺服系统结构图
1.1定位单元FX2N-20GM介绍[1]
为了满足双轴伺服系统的定位要求及其插补功能,该系统选用了FX2N-20GM作为核心运动控制单元,与PLC基本单元FX3U-48MT通过专用连接电缆FX2N-GM-5EC进行连接,配合完成定位功能。FX2N-20GM可以同时控制X、Y两根轴,具有线性/圆弧插补功能,其控制原理为通过输出脉冲序列到伺服电机驱动器的脉冲和方向端口,通过对X轴和Y轴伺服电机的转速和转角连续的定位控制,就可以得到工作台的运行轨迹。通过设置FX2N-20GM定位单元的脉冲当量,可达到1 μm的定位精度。图2所示为FX2N-20GM的基本对外接口。

图2 FX2N-20GM的基本对外接口
1.2双轴伺服系统的电气控制原理
在本系统中触摸屏选用上海昆仑通态的TKC7062K,与FX3U-48MT通过编程电缆进行通讯连接,用于发送主令信号和运行情况的监控。选用FX3U-48MT作为主控单元,FX2N-20GM作为核心定位单元,主控单元与定位单元用连接电缆FX2N-GM-5EC进行连接,实现数据交换。伺服驱动器和伺服电机选择台达伺服驱动器和台达伺服电机。PLC主控单元接收到来自触摸屏的命令后通过缓冲通道发送给FX2N-20GM定位单元,定位单元再同时给X轴,Y轴伺服驱动器发送脉冲,从而控制伺服电机,实现所需要的运动轨迹控制。
控制系统的电气接线原理如图3所示[1,4-5]。FX2N-20GM定位单元的CON3和CON4分别对应连接X轴和Y轴的伺服驱动器相应端子,其中FP接伺服驱动器的方向信号端子,RP接伺服驱动器的脉冲信号端子。对于近点信号输入DOG选用光电接近开关作为标志信号的输入,正向旋转行程结束LSF、反向旋转行程结束LSR选用机械接触式行程开关,其中连接DOG的开关确定了双轴伺服系统的机械原点。伺服电机自带有编码器,连接到伺服驱动器的CN2端子,实现闭环控制。
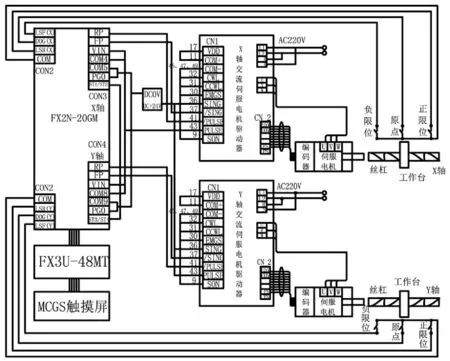
图3 双轴伺服系统电气接线原理图
2 双轴伺服系统的软件程序开发
双轴伺服系统的软件开发包括四部分:人机界面的开发、PLC主机程序及其与触摸屏的通讯程序的编写、定位单元的定位程序及其与基本单元通信的程序编写。
2.1触摸屏界面的设计
触摸屏设计有手动模式和自动模式,在手动模式下能够控制X、Y轴的点动,在自动模式下能实现伺服系统的启动与停止。触摸屏界面如图4所示。
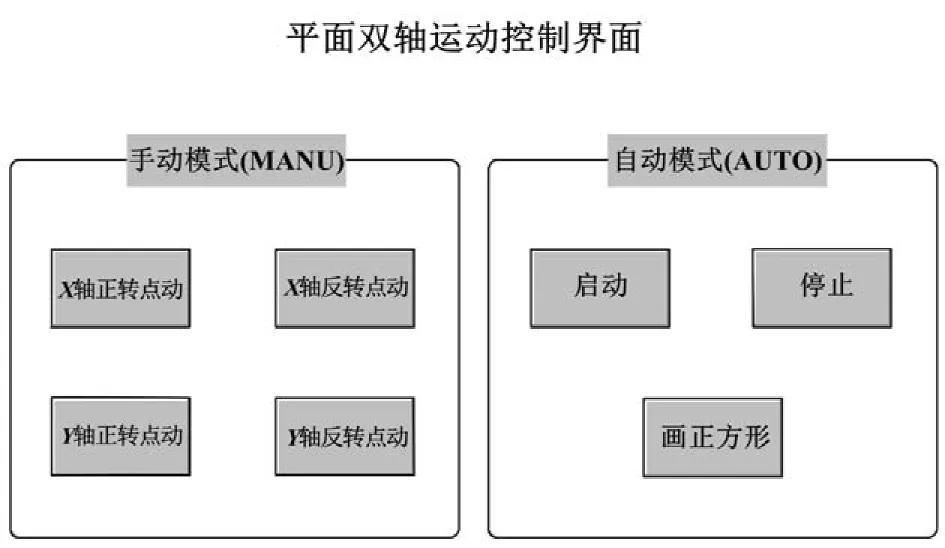
图4 触摸屏界面
2.2PLC主机程序及其与定位单元的通信
定位单元启动、停止、点动、回零等命令是通过操作特殊辅助继电器的状态来控制的,X轴、Y轴常用的主令信号和特殊辅助继电器一一对应,如表1所示。

表1 FX2N-20GM常用特殊辅助继电器一览表
在20GM定位单元与PLC主机之间的通讯数据由FROM/TO指令控制。利用三菱PLC的FROM指令可以把定位单元的BFM中的内容读到PLC中,利用TO指令可以把PLC主机的内容写到BFM中。针对X,Y双轴的伺服运动系统,主要使用了两个缓冲区(BFM#20和BMF#21)[3],#20号缓冲区设置同步2轴和X轴的运行方式,#21号缓冲区设置Y轴的运行方式,每个缓冲通道BFM由16个位组成,每一位的置位和复位都具有不同的控制功能,FX20-GM的定位操作是通过触发BFM20号、BFM21号的位实现的,每个位分配见表2所示。其中,BFM#20号控制X轴,BFM#21号控制Y轴,BFM20号的b1位(M9001)表示开始命令,b2 位(M9002)表示停止命令,b4位(M9004)表示机械回零命令,b5位(M9005)表示正向FWD点动命令,b6位(M9006)表示反向FWD点动命令,触发b5(M9005)即可实现正向FWD点动,触发b6位(M9006)即可实现反向RVS点动。PLC主机发出的数据将通过通信程序传送至20GM缓冲区BMF中。
当主机和定位单元连接后,可以通过对BFM的读写来设定工作台的位移、速度等定位数据,也可以设定定位单元的参数,监控当前运行位置。PLC主机程序如图5所示。
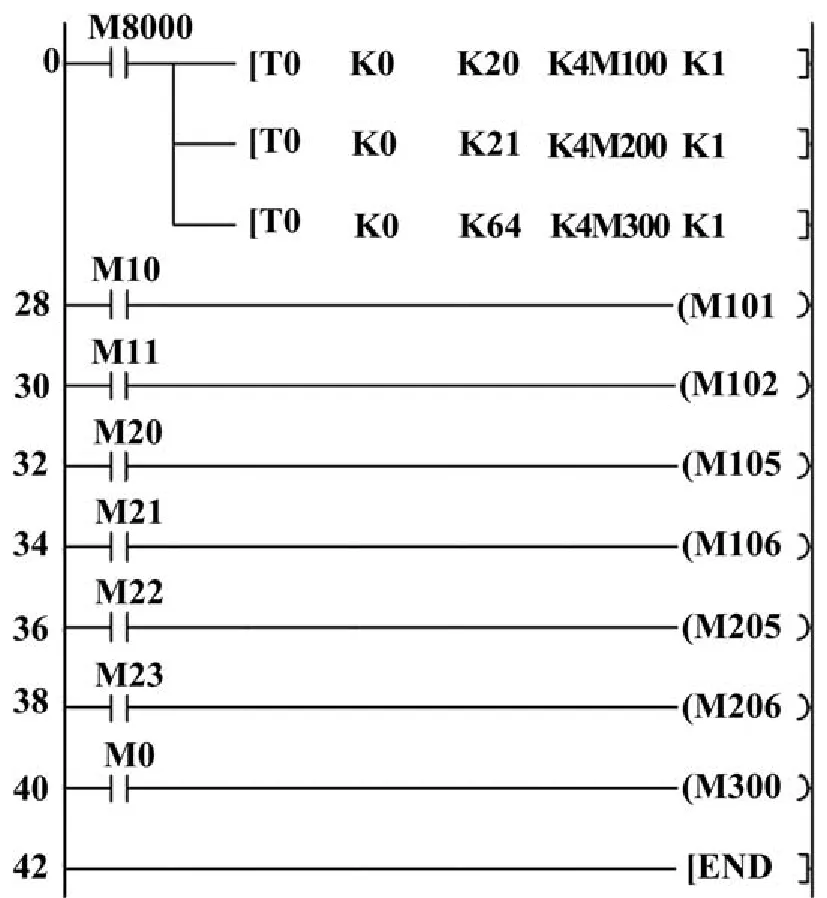
图5 PLC主机程序

表2 FX2N-20GM缓冲存储器的分配一览表
PLC程序中M10为启动,M11为停止,M20 为X轴正向点动,M21为X轴反向点动,M22为Y轴正向点动,M23为Y轴反向点动。
2.3定位程序的编写
定位程序主要采用定位模块专用的软件FX⁃VPS-E进行编写,首先需要在软件中设定定位模块的单位、速度、机械零点等相关参数,然后再利用流程图进行定位程序的编写,参数设置如图6所示。

图6 FX2N-20GM相关参数的设置
FX2N-20GM定位模块提供了丰富的指令和图形化的流程图方便用户编写定位程序,在本系统中主要采用了定位软件FXVPS-E提供的流程图进行运动程序的编写,这种图形化的程序开发简单易学,扩展方便[4]。下面提供了一个方形运动控制程序开发实例。
如图7所示,这是一个利用FXVPS-E编写的直线插补定位程序,当触摸屏将PLC软元件M0置位后,即可执行P1定位程序,它实现了一个方形轨迹。因此,通过编写不同的定位程序,工作台就可以得到用户所需的运动轨迹。
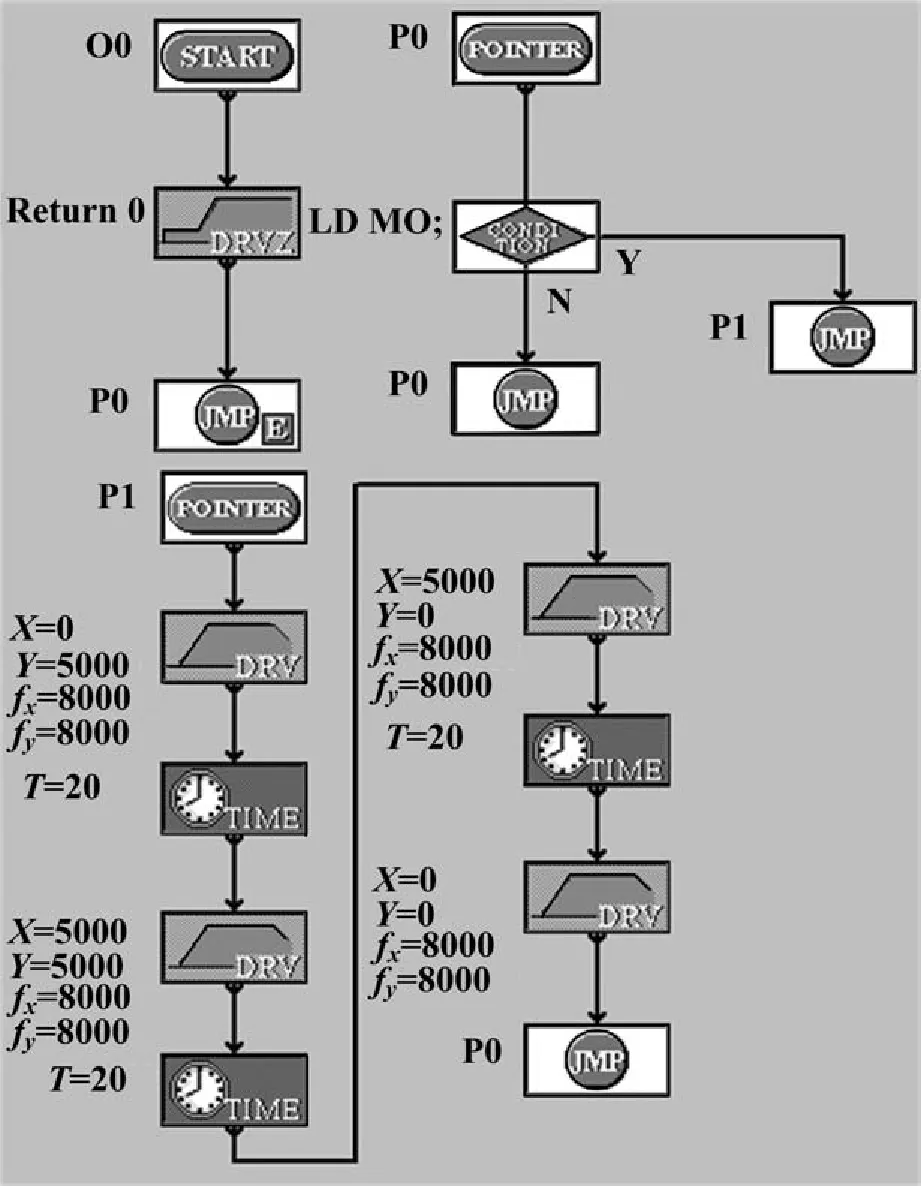
图7 FXVPS程序
3 结论
定位单元FX2N-20GM具有很强的运动控制能力,与交流伺服驱动器配合可以实现高精度的双轴位置控制系统。该系统硬件结构简单,软件程序易于开发,便于用户根据不同的需求进行使用。经过测试,该控制系统精度较高,开放性、通用性和扩展性较好,可以广泛应用于工程技术领域。
参考文献:
[1]FX2N-10GM和FX2N-20GM硬件编程手册[Z].日本,三菱公司,2002.
[2]三菱FX3U用户手册[Z].日本,三菱公司,2005.
[3]万洁芸.数控机床PLC两轴联动控制实例简析[J].拖拉机与农用运输车,2009,36(1):107-108.
[4]薛永风,朱学军,方赟.基于FX2N-20GM的双轴步进控制系统设计[J].组合机床与自动化加工技术,2011(09):73-76.
[5]ASDA-AB系列进阶泛用型伺服驱动器应用技术手册[Z].上海,中达电通,2008.
(编辑:向飞)
The Design of Two Axis Servo System Based on MCGS and FX2N - 20GM
LIANG Sheng-long
(Zhuhai City Polytechnic,Zhuhai519090,China)
Abstract:The two axis servo system was designed.The design chose FX2N-20GM as core motion controller,combined with the Mitsubishi PLC,MCGS touch screen and delta servo motor driver.The hardware structure and software program of two axis servo system in detail. Through the experiment,the control precision of the system is higher,openness,universality and expansibility is good,can be is widely used in the field of engineering technology.
Key words:FX2N-20GM;positioning module;servo system;PLC;MCGS
作者简介:梁生龙,男,1982年生,山西盂县人,硕士研究生,讲师。研究领域:机械电子工程。
收稿日期:2015-05-14
DOI:10. 3969 / j. issn. 1009-9492. 2015. 11. 025
中图分类号:TP273
文献标识码:A
文章编号:1009-9492 ( 2015 ) 11-0094-04
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
电脑爱好者(2020年6期)2020-05-26
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年8期)2017-11-27
凿岩机械气动工具(2017年3期)2017-11-22
光学精密工程(2016年5期)2016-11-07
照明工程学报(2016年3期)2016-06-01
北京航空航天大学学报(2016年4期)2016-02-27
焊接(2015年9期)2015-07-18
弹箭与制导学报(2015年1期)2015-03-11

- 机电工程技术的其它文章
- TinyOS环境下交通信息采集自组网系统设计**国家自然科学基金资助项目(编号:50878088);广东省高等学校学科建设专项项目(编号:2013WYXM0133);广东省高等学校优秀青年教师培养计划资助项目(编号:Yq2013180)。
- 舵机加载系统及其伺服驱动器控制参数设置方法**航空科学基金资助项目(编号:20130863006)
- 基于海马号ROV富钴结壳的钻取技术研究**国家高技术研究发展计划(863计划)资助项目(编号:GZH201100307-04-01)
- 大摆锤驱动头动力学建模与仿真研究**国家质检总局科技计划项目(编号:2014QK255)
- 基于最小二乘法和递推最小二乘法的雷达伺服跟踪系统建模
- 基于ArtCAM的十二生肖浮雕加工研究**江苏省大学生实践创新计划项目(编号:201412808005Y)