
大摆锤驱动头动力学建模与仿真研究**国家质检总局科技计划项目(编号:2014QK255)
2015-03-12 02:05宋伟科单宇佳中国特种设备检测研究院北京100029
机电工程技术 2015年11期
关键词:设计优化
宋伟科,单宇佳,赵 欣(中国特种设备检测研究院,北京 100029)
大摆锤驱动头动力学建模与仿真研究**国家质检总局科技计划项目(编号:2014QK255)
宋伟科,单宇佳,赵欣
(中国特种设备检测研究院,北京100029)
摘要:在正常满载工况和极限偏载工况条件下,利用虚拟仿真技术对典型旋转类游乐设施-大摆锤驱动头进行了动力学仿真分析研究,考虑了转盘旋转对驱动头回转支承的影响,更加真实的获取了大摆锤驱动头部分的运动学和动力学特性。在此基础上进行了驱动轴疲劳强度计算,为大摆锤的结构优化设计提供了理论基础。
关键词:大摆锤驱动头;动力学仿真;疲劳分析;设计优化
0 引言
大摆锤作为一种典型的旋转类大型游乐设施,目前已成为国内增长速度最快、数量最多、年载客最大的大型游乐设施之一。由于其复杂运动形式和高位驱动方式,大摆锤存在的潜在事故风险也是最多的。为了获得大摆锤驱动头事故发生的本质原因,对大摆锤驱动头部分进行系统的动力学分析研究势在必行。由于其复杂的运行形式,传统理论计算方法无法充分考虑各种复杂工况对设备性能的影响,因此很难准确的进行运动学和动力学计算。本文在分析大摆锤运行特点、运动拓扑结构和动力学模型的基础上,利用虚拟样机技术,采用Pro/E三维建模和ADAMS建模方法,建立大摆锤整机动力学模型。在满载运行工况条件进行了大摆锤运动学及动力学仿真分析,并在此基础上开展了减速机驱动轴的疲劳寿命计算。通过仿真分析和理论计算,获得大摆锤动力头部分的运动学和动力学特性,为后续的结构优化设计提供理论基础。
1 大摆锤拓扑结构分析与建模
根据大摆锤的结构原理、运行特点及实际分析的需要,对大摆锤的结构进行简化,分析各部分连接关系,建立其多体系统拓扑结构,如图1。图1中,方框表示动力学分析时的零件,方框之间的连线表示零件之间的连接关系,Fixed为固定副,两零件之间不发生相对运动;Revolution为旋转副,两零件之间只能沿一个给定轴线相对转动;Spherical为球面副,两零件之间只有三个方向的相对转动,无相对位移。

图1 大摆锤拓扑结构图
本文利用Pro/E建立大摆锤三维模型,通过Pro/E和ADAMS接口将模型导入ADAMS中进行运动学和动力学分析。本文模型为市场上常见的30人大摆锤,动力学模型如图2所示。
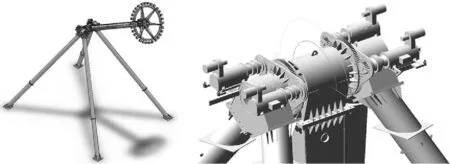
图2 大摆锤动力学模型
大摆锤的运动形式为摆臂摆动和座舱的旋转运动,本文利用ADAMS中的SFORCE函数仿真摆臂驱动力矩,利用ADAMS自带的SIGN变相函数来实现驱动单摆运动[2-3],通过摆动角度的方向控制驱动扭矩方向,使用传感器SEN⁃SOR实现在在吊臂摆动角度达到110°时,失效驱动扭矩,在自由摆动4次(单向摆动4次)后,启用制动扭矩实现摆动的减速、制动。通过MOTION函数来仿真转盘转动的驱动,实现恒转速72 deg/s。
根据《游乐设施安全规范》(GB8408)要求,系统坐标系定义如下,X为摆动轴向,Y为回转且径向垂直于吊臂方向,Z为重力方向[4]。
2 大摆锤运行工况分析与仿真
大摆锤在运行过程中有多种工况,如满载、偏载、空载、风载(正向及侧向)、地震载荷等,由于篇幅有限,同时考虑大摆锤日常运营中的实际情况,本文只选取满载和偏载两种工况进行仿真研究。其中满载工况主要考虑设备在满负荷载荷条件下的运动学和动力学性能。由于游乐园的运营分淡季和旺季,游乐设施不可避免存在不满载运行工况,为了获取大摆锤在极限偏载工况下的动力学性能,本文对偏载量为连续1/2满载工况进行仿真分析。
2.1满载工况
本节仿真不考虑系统各种误差可能[6-8],仅仅仿真大摆锤在满载正常运行工况下的运动学和动力学特性。通过仿真,大摆锤吊臂角速度和角加速度曲线如图3、4所示,乘客速度及加速度曲线如图5、6所示。大摆锤满载工况下运动学特性见表1。
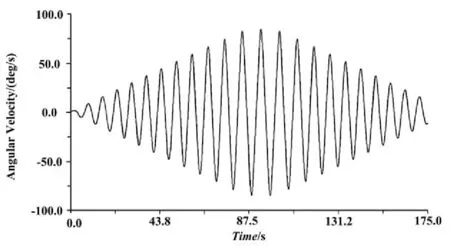
图3 吊臂摆动角速度曲线

图4 吊臂摆动角加速度曲线
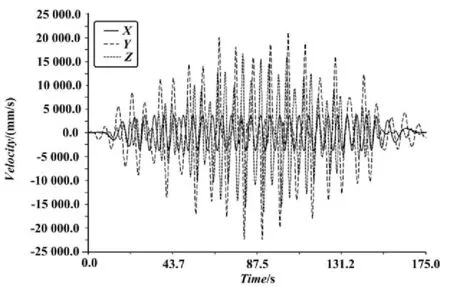
图5 乘客运动速度曲线
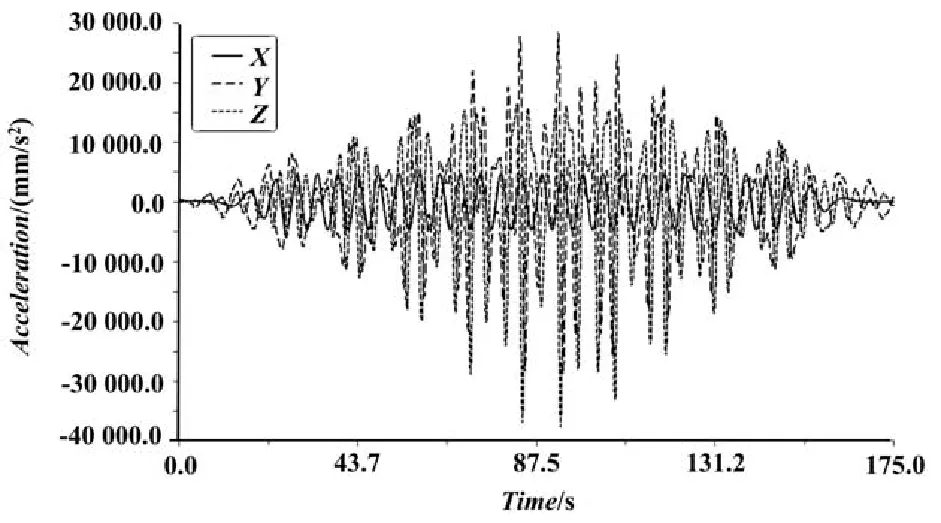
图6 乘客运动加速度曲线

表1 运动学特性仿真结果
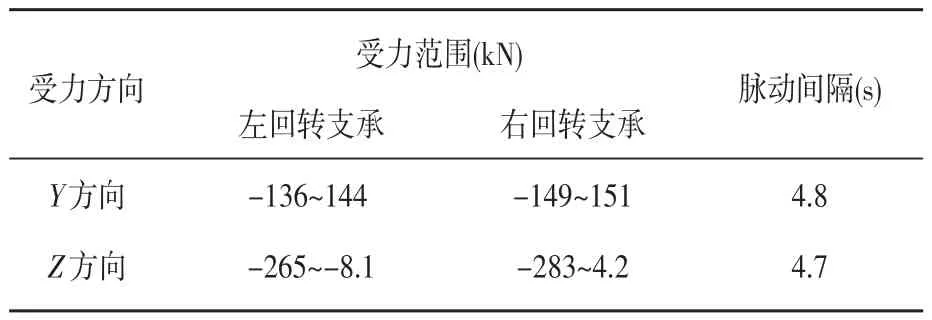
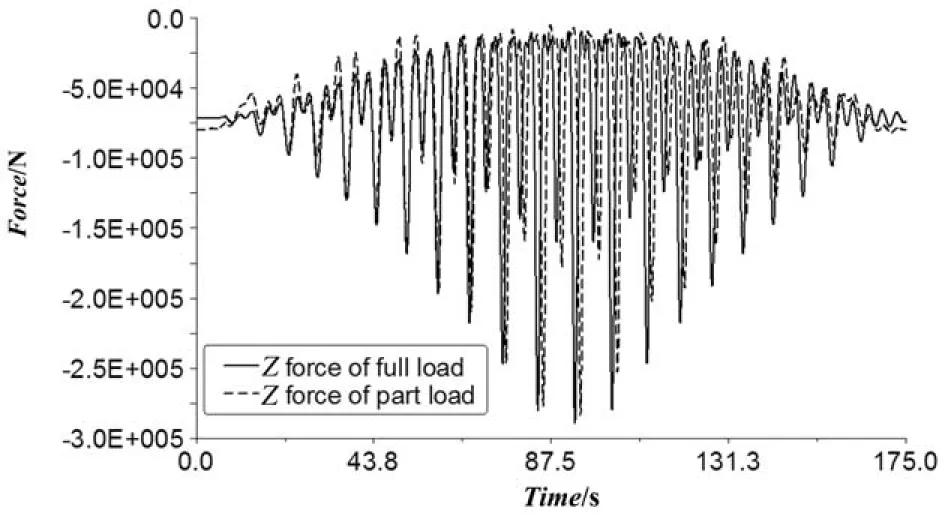
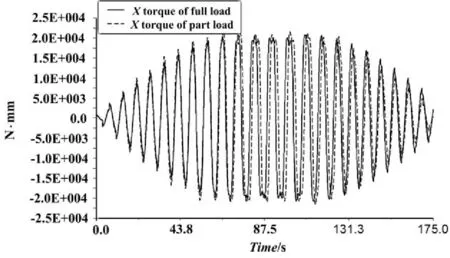
由表1可见,乘客在复合运动时最大速度出现在Y侧向,最大加速度出现在Z向,根据游乐设施安全规范(GB8408-2008)要求,仅考虑持续时间大于0.1 s的稳定加速度,加速度允许值|ay|=2.5g,-6.0g 大摆锤驱动头回转支承承受摆臂转盘及乘客在摆动和旋转复合运动下的载荷,理论计算无法获得详细动力学特性,在满载工况下回转支承在各个方向的力和力矩如图7、8所示。 图7 满载工况下回转支承受力曲线 大摆锤满载工况下回转支承动力学特性见表2。 表2 回转支承动力学特性仿真结果 由表2可见,回转支承在Y和Z方向上受力较大,在X方向上力矩最大。由分析可知,X方向力矩主要为驱动和制动力矩,Y和Z方向受力主要为摆臂及转盘座舱自重及摆动过程引起的惯性力及其分量等。因此对于大摆锤回转支承的动力学特性,可以重点关注X方向的力矩和Y、Z方向受力即可。 由于大摆锤的运动由两种形式组成,摆臂摆动的同时座舱转盘还进行自旋转运动,因此驱动头回转支承除承受摆臂的摆动惯性力之外还承受由于座舱自转引起的径向力波动,该受力很难进行理论计算。在本次动力学仿真中,座舱回转方向为顺时针方向(自上而下),对左右回转支承径向(Y向)和重力向(Z向)受力进行了对比仿真研究,仿真曲线如图9和10所示。左右回转支承受力特性对比分析见表3。 图9 左右回转支承Y向受力分析对比曲线 图10 左右回转支承Z向受力分析对比曲线 表3 左右回转支承力学特性对比表 图9与图3摆臂角速度曲线对比可知,在角速度最大时,即摆臂竖直位置,左右回转支承均不承受摆动轴径向载荷;而图10与图3摆臂角速度曲线对比可知,在角速度最大时,左右回转支承的Z向受力最大,与实际运行工况相符。 大摆锤在摆臂摆动的同时,座舱转盘在回转支承转动作用下回转,造成左右回转支承的受力特性存在时间间隔,由旋转角速度ω=72deg/s可知,T=5 s,实际仿真结果左右回转支承最大受力时间间隔为4.7~4.8 s,与理论计算一致,从而验证了大摆锤复合运动工况下的驱动头受力情况。 2.2偏载工况 大型游乐设施不同于其他一般类机械设备,由于存在旅游淡季和旺季的差别,游乐设施在运行时,经常发生偏载运行工况,本节对大摆锤驱动头极限偏载工况进行动力学仿真研究,极限偏载工况为乘客的连续1/2满载,根据上节对大摆锤驱动头满载工况的仿真结果可知,驱动头主要在Z方向受力(如图7)和X方向扭矩(如图8)最大,因此本节主要仿真偏载工况下的Z方向力和X方向扭矩,仿真结果如图11和图12所示。 图11 回转支承满载和偏载Z向受力分析对比 图12 回转支承满载和偏载X向力矩分析对比 回转支承在满载和偏载工况下的受力特性对比分析见表4。 表4 回转支承不同工况动力学特性仿真结果 由上述仿真结果可以看出,由于偏载作用,导致载荷量减小,惯性力减小,从而导致Z向受力相应减小。而对于回转支承力矩,由于转盘旋转作用,导致回转支承在不同时间所受力矩变动明显,力矩量值变化不大。 通过对大摆锤满载和偏载运行工况的运动学和动力学仿真研究可以获知设备的运动特性,设备的速度和加速度性能满足相关规范要求。在驱动头部分,通过XYZ三个方向的受力和力矩仿真可以获得详细的动力学性能,满载工况为设备的危险工况,受力最大,应在此工况下对设备的主要受力部件进行强度分析,而偏载工况下,设备的冲击更为明显,对回转支承和传动轴的影响更明显,应对动力头部分进行重点分析。 大摆锤减速机驱动轴通过小齿轮将动力传递给回转支承,实现摆臂的摆动,因此驱动轴承除了承受自身扭矩外,还要承受驱动齿轮与回转支承啮合处的切向力带给轴的弯矩,故轴的分析属于弯扭合成类型:查《机械设计手册》第二册中疲劳强度安全系数校核公式[9]为: 式(3)中,Sσ是只考虑弯矩作用时的安全系数,Sτ是只考虑扭矩作用时的安全系数;Sp是按疲劳强度计算的许用安全系数,取1.73。下面分别从弯矩和扭矩两个方面开展计算分析。 弯矩方面:运行时齿轮接触力对减速机驱动轴会产生一个径向力,F=T/Rcosα,其中T为驱动轴传递的最大扭矩,R为驱动小齿轮分度圆半径,α为齿轮压力角,一般为20°。由仿真可知,按脉动循环计算疲劳强度。 扭矩方面:按减速机额定输出扭矩计算。 由公式(1)可得,减速机驱动轴的弯矩组合疲劳强度安全系数为S=1.78≥1.73。由疲劳计算可知,该驱动轴疲劳强度满足安全规范要求,理论上为无限寿命。 本文在分析大摆锤拓扑结构基础上,通过动力学仿真获取了大摆锤驱动头部分在满载和偏载工况条件下的运动学和动力学特性,分析了由于转盘转动对左右回转支承造成的载荷影响,更加接近实际运行工况,在动力学仿真的基础上开展了大摆锤驱动轴疲劳强度校核分析,从而为后续的大摆锤驱动头结构优化设计提供了理论基础,更有利于降低设备研发成本,提高设备安全性能。 参考文献: [1]林伟明.典型游乐设施复杂工况下风险评估及故障预防研究[M].北京:北京化工大学出版社,2013. [2]陈立平.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005. [3]朱海荣.基于虚拟样机技术的游乐设施安全分析方法探讨[J].中国安全科学学报,2004,14(3):12-15. [4]EN13814-2004. Fairground and amusement park machin⁃ery and structure-safety[S]. [5]梁朝虎.过山车动态仿真建模方法研究[J].系统仿真学报,2006,18(增1):280-283. [6]梁朝虎.滑行车类游乐设施动力学建模与仿真[J].中国安全科学学报,2007,17(9):14-20. [7]于泽涛.基于虚拟样机技术的过山车仿真研究[D].大连:大连理工大学,2009. [8]陈朝阳,王跃勇,李炳坚.大摆锤游艺机加速度分析[J].机电工程技术,2011,40(8):103-106. (编辑:阮毅) Research on Large Pendulum Driving Unit Dynamic Modeling and Simulations SONG Wei-ke,SHAN Yu-jia,ZHAO Xin Abstract:To obtain the more detailed dynamic characteristics of large pendulum in complex working condition and analyze its failure mode,this paper puts forward the dynamic simulation of a full-load and part-load large pendulum considering the influence on the slewing bearing because of the rotation of gondola. Therefore,the submitted simulation obtains the more authentic kinematic and dynamic characteristics of large pendulum driving unit. Thereafter,the fatigue safety calculation of drive shaft has been done,which provides the base for optimizing the design of large pendulum. Key words:large pendulum driving unit;dynamic simulation;fatigue analysis;design optimization 作者简介:第一宋伟科,男,1983年生,山东泰安人,博士研究生,工程师。研究领域:大型游乐设施安全保障技术。 收稿日期:2015-05-28 DOI:10. 3969 / j. issn. 1009-9492. 2015. 11. 004 中图分类号:TP391.9 文献标识码:A 文章编号:1009-9492 ( 2015 ) 11-0016-05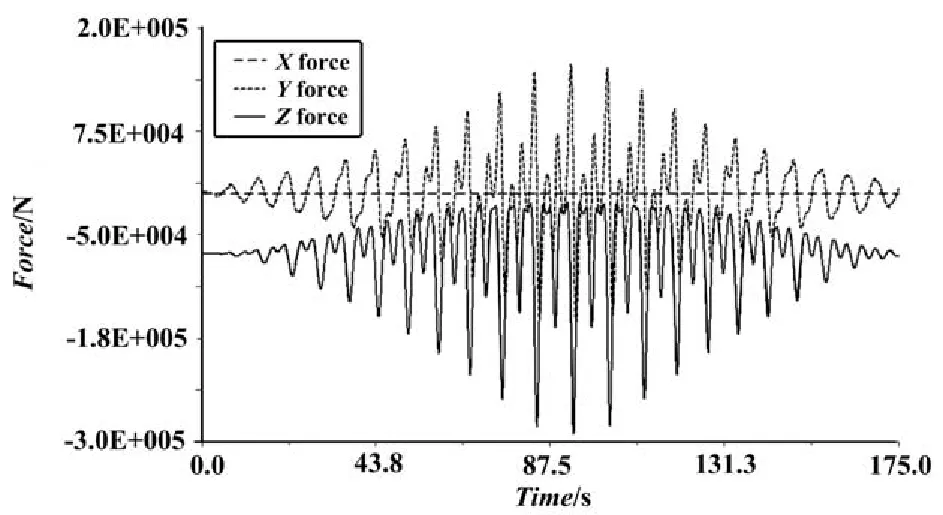
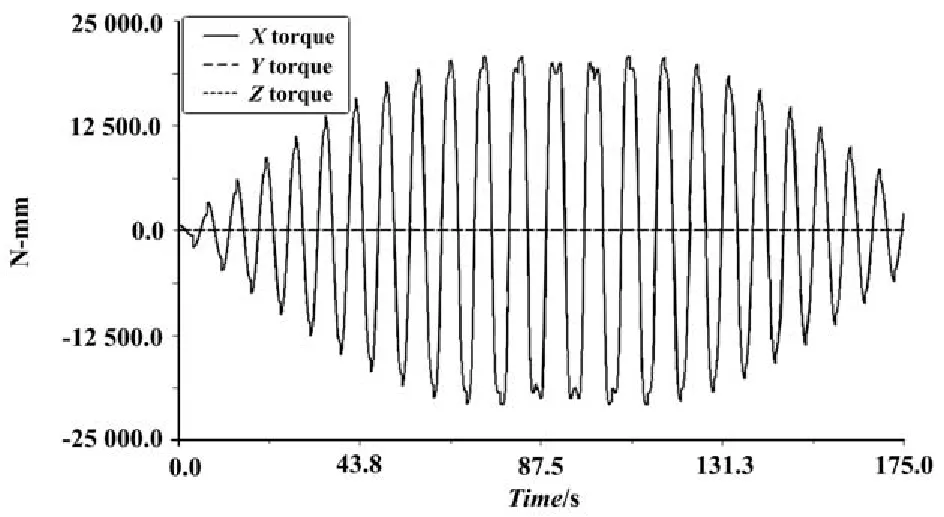
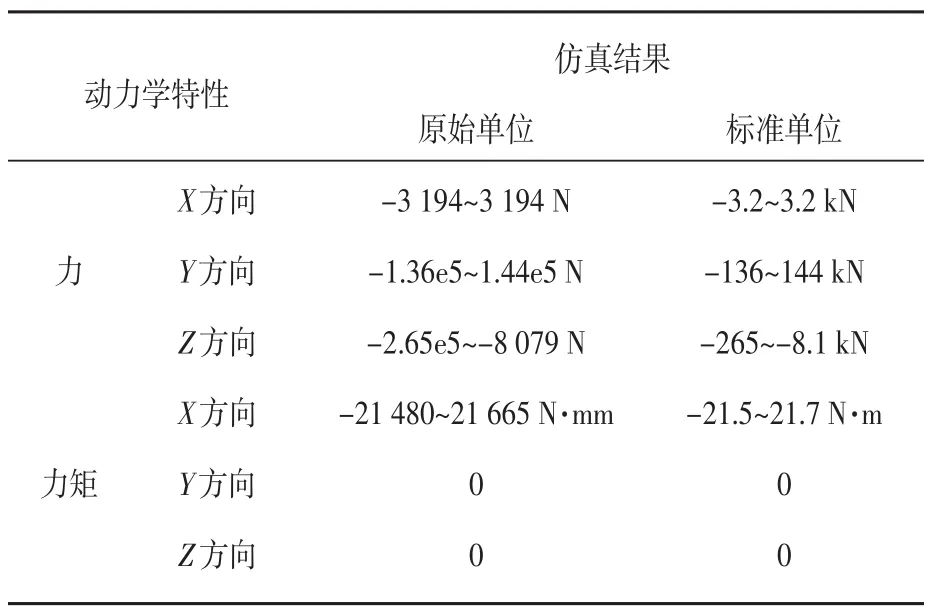
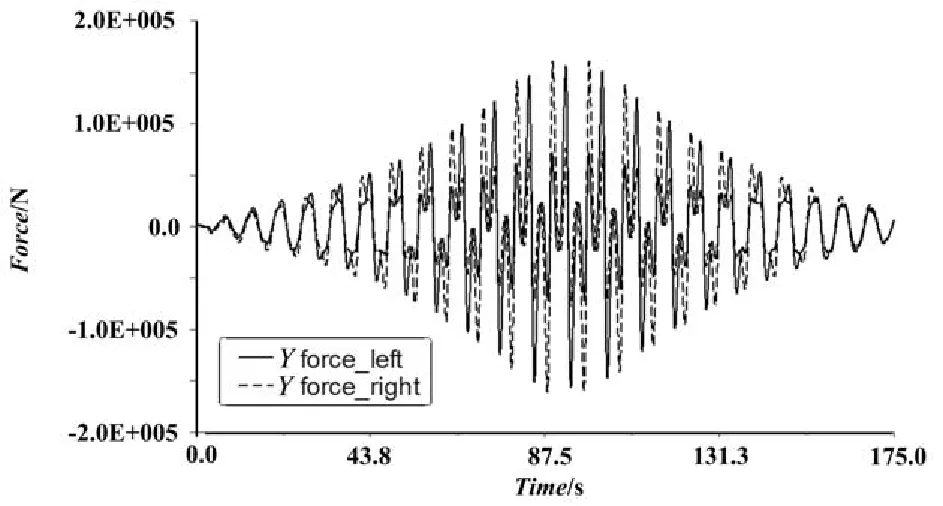


3 驱动轴疲劳强度校核


4 结论
(China Special Equipment Inspection and Research Institute,Beijing100029,China)
猜你喜欢
科学与财富(2017年8期)2017-04-11
中国高新技术企业(2017年3期)2017-03-30
化学教与学(2017年2期)2017-03-16
建筑建材装饰(2016年14期)2017-01-05
建筑建材装饰(2016年11期)2016-12-29
小学教学参考(综合)(2016年11期)2016-11-14
美与时代·城市版(2016年8期)2016-11-10
企业导报(2016年13期)2016-07-19
湖南大学学报·自然科学版(2015年8期)2015-09-06
中国高新技术企业(2015年25期)2015-07-24

- 机电工程技术的其它文章
- TinyOS环境下交通信息采集自组网系统设计**国家自然科学基金资助项目(编号:50878088);广东省高等学校学科建设专项项目(编号:2013WYXM0133);广东省高等学校优秀青年教师培养计划资助项目(编号:Yq2013180)。
- 舵机加载系统及其伺服驱动器控制参数设置方法**航空科学基金资助项目(编号:20130863006)
- 基于海马号ROV富钴结壳的钻取技术研究**国家高技术研究发展计划(863计划)资助项目(编号:GZH201100307-04-01)
- 基于最小二乘法和递推最小二乘法的雷达伺服跟踪系统建模
- 基于ArtCAM的十二生肖浮雕加工研究**江苏省大学生实践创新计划项目(编号:201412808005Y)
- 一种多工位全自动玩具喷涂机的设计