
一种多工位全自动玩具喷涂机的设计
2015-03-12 02:05:47徐小明彭忠凯广东工业大学机电工程学院广东广州510006
机电工程技术 2015年11期
关键词:模块化
林 敏,徐小明,彭忠凯(广东工业大学机电工程学院,广东广州 510006)
一种多工位全自动玩具喷涂机的设计
林敏,徐小明,彭忠凯
(广东工业大学机电工程学院,广东广州510006)
摘要:设计了一种适用于小型塑胶玩具外表面喷涂的多工位全自动喷涂机。首先,详细阐述了多工位全自动喷涂机的工作原理,接着,对喷涂机的主要结构进行了介绍,包括移动模座、移动模座往复运动系统、喷枪空间运动系统和洗模枪往复运动系统,最后,确定了喷涂机的控制系统。该机能够实现玩具360°翻转、多种颜色的喷涂,具有工作可靠、结构模块化和卸料容易等优点,稍作改造还可适用于其他小型物件的外表面喷涂。
关键词:喷涂;多工位;喷涂机;模块化
0 引言
塑胶玩具制造过程中,表面装饰是一道重要的工序,而表面装饰一般是对塑胶玩具进行喷涂[1]。目前市场上出现了大量的自动化喷涂设备,但都局限于对单个玩具、单种颜色的平面喷涂,产品生产周期长,自动化程度较低。伴随着玩具种类的增多和工艺复杂性的提升,现有的喷涂设备已经无法满足行业需求。因此,研制一种用于塑胶玩具表面喷涂的多工位全自动喷涂机,对提升塑胶玩具行业的生产效率、提高产品质量和行业自动化程度十分必要。
本课题研究的基于PLC的塑胶玩具多工位全自动喷涂机,实现了塑胶玩具360°翻转、多种颜色的喷涂,流水线生产,在单台玩具喷涂机上完成玩具表面不同位置的喷涂任务,极大的提高了生产效率,降低了生产成本。对于不同的玩具和喷涂工序,只须更换不同的铜模,亦能对其实现自动喷涂。因多工位玩具喷涂机机构模块化,为了叙述方便,本文以二色塑胶玩具喷涂机(以下简称玩具喷涂机)进行说明。
1 玩具喷涂机的工作原理
玩具喷涂机设有五个工位,分别为两个清洗工位、两个喷涂工位和一个落料工位,由移动模座1、移动模座往复运动系统2、喷枪空间运动系统3、洗模枪往复运动系统4等4个主要机械部分及控制系统5组成,如图1所示。移动模座1错位布置在清洗工位1、喷涂工位1、清洗工位2和喷涂工位2,并且,同侧的移动模座通过连接杆固定连接,能同步运动;喷枪空间运动系统3安装在喷涂工位1和喷涂工位2;洗模枪往复运动系统4安装在清洗工位1和清洗工位2;整体布局呈多组串联直线型结构。
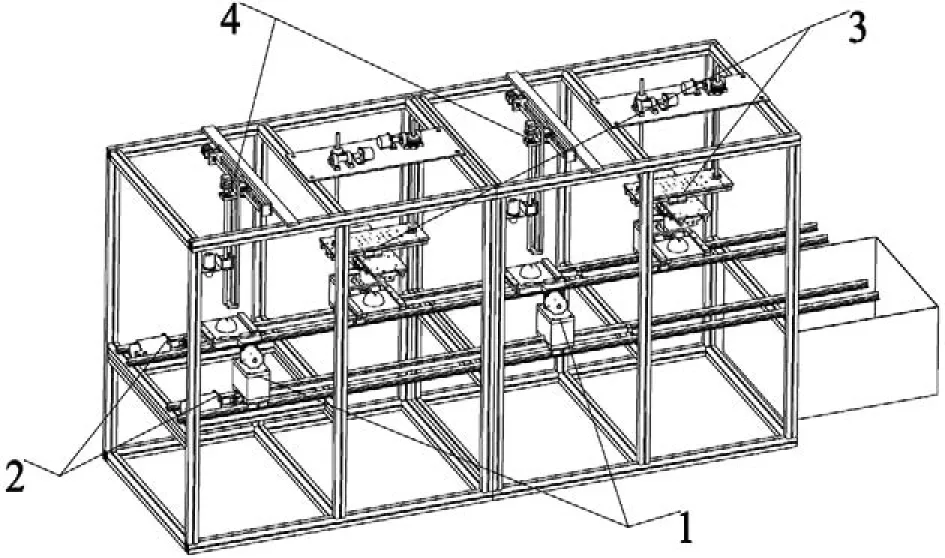
图1 二色塑胶玩具喷涂机系统示意图
玩具喷涂机启动时,首先把待喷涂的塑胶玩具人工放入到位于清洗工位1的移动模座的夹模中(或自动上料),由移动模座往复运动系统将其运送到喷涂工位1,通过夹模张合和回转运动,实现玩具在移动模座间传递;初始移动模座复位到清洗工位1,并对空的夹模上料;喷枪空间运动系统迫使喷枪按照预先设定的路径到达夹模上端喷涂处并对翻转的夹模进行喷涂及复位。完成第一种颜色喷涂的玩具,由移动模座往复运动系统将其运送到清洗工位2,并在移动模座间传递,由另一侧的移动模座运送到喷涂工位2,进行第二种颜色的喷涂工作;此时,停留在清洗工位的移动模座,洗模枪往复运动系统驱动洗模枪对夹模进行清洗并复位。
玩具喷涂机通过结构上的模块化及并行布置的移动模座往复运动系统,实现玩具在不同工位间的传递,并允许同步对铜模进行清洗及上料。当完成玩具两种颜色的喷涂后,移动模座往复运动系统驱动移动模座至落料工位处,通过夹模张合和回转运动,完成落料。
2 玩具喷涂机的结构组成
玩具喷涂机主要由移动模座、移动模座往复运动系统、喷枪空间运动系统和洗模枪往复运动系统组成,下面详细介绍其结构组成和运动原理。
2.1移动模座
移动模座包括喷涂模夹总成、移动支撑座、直线滑块轴承和步进电机等,如图2所示。喷涂模夹总成是玩具翻转喷涂和传递的关键部件,其上铜模的下表面和下铜模的上表面共面贴合,形成夹模。中轴一端与铜模横梁固定连接,一端与步进电机用销钉连接;步进电机工作时,驱动夹模同步转动,实现塑胶玩具的360°翻转,进而对玩具全面喷涂。移动支撑座通过直线滑块轴承安装在直线导轨上。
本课题研究的玩具喷涂机有四个移动模座,其喷涂模夹总成中心共面,不同移动模座间上铜模和下铜模可以重新结合,构成新的夹模,这是实现玩具在不同工位间传递的关键。同侧的移动模座通过连接杆固定连接,简化整机结构的同时,提升了铜模的定位精度。
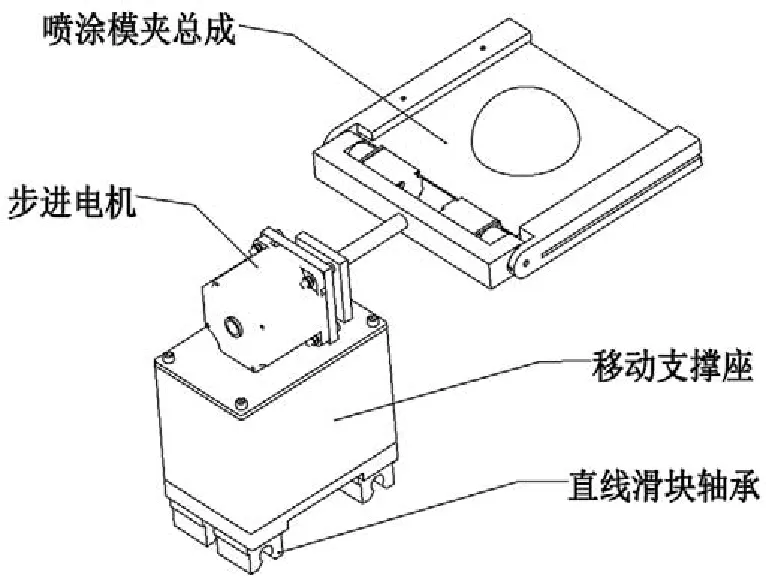
图2 移动模座结构示意图
2.2移动模座往复运动系统
移动模座往复运动系统包括步进电机、滚珠丝杆、连接杆等,如图3所示。步进电机驱动滚珠丝杆转动,固定在丝杆螺母上的安装座与移动模座固定连接,从而带动移动模座作轴向往复直线运动。移动模座安装在线性导轨上,与同侧的移动模座用连接杆固定连接并同步运动。由于电机可以在需要的位置启动、停止和调速,以及滚珠丝杆的高传动精度,易实现移动模座的快速启动、精确停止和速度的调节,实现玩具在不同移动模座间的传递。
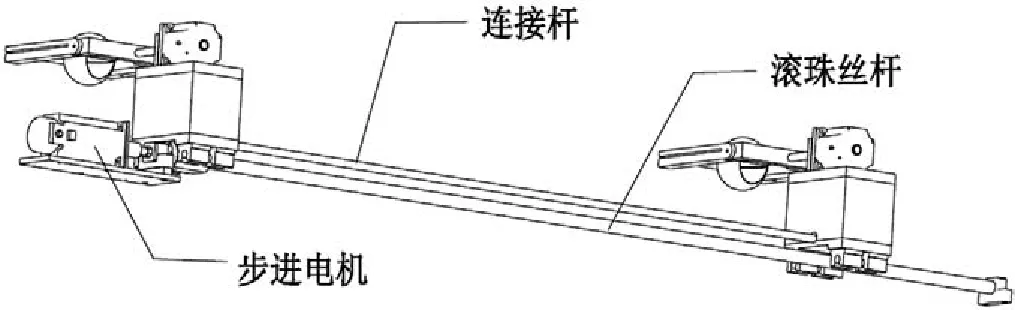
图3 移动模座往复运动系统结构示意图
2.3喷枪空间运动系统
喷枪空间运动系统包括步进电机、螺杆、滚珠丝杆、导轨和齿轮等。喷枪具有三个自由度,分别为沿X轴、Y轴和Z轴的直线移动。步进电机带动螺杆沿Z轴上下往复运动,实现喷枪的上下移动,对喷枪高度定位;其余两个步进电机带动滚珠丝杆转动,使得喷枪沿X轴和Y轴移动,对喷涂位置定位。通过三个步进电机的协调配合,可以对空间中任一位置开口的铜模中的玩具进行喷涂,并保证喷漆涂层的厚度和质量[2]。
2.4洗模枪往复运动系统
洗模枪往复运动系统包括步进电机、滚珠丝杆和导轨等。洗模枪包含两个自由度,分别为沿Y轴和Z轴的直线移动。通过调节步进电机,可以控制洗模枪相对铜模的位置,达到最佳的清洗效果。
3 控制系统设计
玩具喷涂机的控制系统可以采用多种方式,如单板机或单片机控制,这种控制方式不仅要软件开发,还需要设计硬件电路、接口电路、驱动电路,尤其是工业现场中的抗干扰问题。因为PLC具有抗干扰能力强、可靠性高等优点,本课题主系统采用三菱PLC控制。通过触摸屏将执行参数输入到PLC中,运用组态软件编写设计程序,降低了难度,便于程序的二次开发,极大提高了产品的适应性[3]。玩具喷涂机的控制系统硬件组成如图4所示。

图4 控制系统硬件组成
首先编写触摸屏程序,把运动轨迹参数输入到PLC中,同时在触摸屏上显示当前运行的坐标值,采用组态的配方数据传递,保证数据更新的速度。触摸屏里可以保存多组按设定的工艺参数编好的程序,更好的适应产品更改的需求。PLC主要是处理计算触摸屏参数,同时根据输入信号控制步进电机的运动[4]。本文中使用的步进电机对位置和运动的精度要求比较高,因此,采用了三菱的定位模块FX2n-1PG来控制[5]。在FX2n-1PG模块里有一个BFM寄存器,可以设置最大速度、加速减速时间、基速等一系列参数,极大的保证了不丢步,且每次回到上顶点时坐标值都会自动回零以保证每次在同一个位置时它的坐标都是相同的,减少了累计误差,保证了喷涂质量。
设计的多工位全自动玩具喷涂机具有如下特点:(1)玩具喷涂机可以搭配不同的铜模,即可喷涂不同尺寸物件的外表面和和不同位置;(2)移动模座的往复移动、喷枪和洗模枪的动作具有定位检测,机械、电气双保险精确定位;(3)玩具喷涂机结构模块化,能够实现玩具360°翻转、多种颜色的喷涂。玩具喷涂机的性能参数为:移动模座相邻
工位间距为500 mm,移动速度400 mm/s(速度可调),日产8 000件。
4 结束语
设计的多工位全自动玩具喷涂机有移动模座、移动模座往复运动系统、喷枪空间运动系统、洗模枪往复运动系统等4个主要机械部分和控制系统组成,运用并行布置的移动模座往复运动系统,实现玩具在不同工位间的传递及喷涂工序、清洗工序和上下料工序的协同进行。本课题研究的二色塑胶玩具喷涂机实现了玩具360°翻转、两种颜色的喷涂,整机结构模块化,通过串联组合相同的喷涂工位和清洗工位,实现对更多颜色种类的喷涂。采用PLC控制技术,实现了自动高效喷涂并保证喷涂品质和产量。该塑胶玩具喷涂机还具有工作可靠、卸料容易等优点,适合玩具企业的需要。
参考文献:
[1]卢飞跃,薛小伟.塑胶玩具制造工艺[M].北京:化学工业出版社,2010.
[2]张永贵.喷涂机器人若干关键技术研究[D].西安:西安理工大学,2008.
[3]徐晓东,蒋益兴,宋瑞宏,等.内壁自动喷涂机控制系统的设计与研制[J].机电工程,2008,25(9):74-76.
[4]沈惠平,蒋益新,宋瑞宏,等.物件内壁全自动喷涂机的设计与研制[J].机械设计,2009,26(2):76-78.
[5]秦春斌,张继伟. PLC基础及应用教程[M].北京:机械工业出版社,2011.
(编辑:阮毅)
Design of a Multi-Station Full Automatic Spraying Machine for Toys
LIN Min,XU Xiao-ming,PENG Zhong-kai
(College of Mechanical and Electrical Engineering,Guangdong University of Technology,Guangzhou 510006,China)
Abstract:A kind of multi-station full automatic spraying machine was described,which was suitable for surface spraying of small plastic toys. First,the working principle of multi-station full automatic spraying machine was expounded in detail,and then the structural constitutions were introduced,including the moving mold holder,the moving mold holder reciprocation system,the gun space motion system and the wash-gun reciprocation system. Finally,the control system was determined. This machine can achieve toy 360°flip and spray a plurality of colors,with the advances of reliable,modular structure and easy unloading materials. A little reformation of this machine would also be suitable for surface spraying of other small objects.
Key words:spraying;multi-station;spraying machine;modular
作者简介:第一林敏,男,1991年生,江西赣州人,硕士研究生。研究领域:机械设计及理论。
收稿日期:2015-05-06
DOI:10. 3969 / j. issn. 1009-9492. 2015. 11. 007
中图分类号:TH122
文献标识码:A
文章编号:1009-9492 ( 2015 ) 11-0026-03
猜你喜欢
海洋信息技术与应用(2022年1期)2022-06-05 07:38:22
装备制造技术(2021年2期)2021-07-21 05:38:44
现代装饰(2020年5期)2020-05-30 13:01:56
汽车与新动力(2019年5期)2019-11-07 05:20:16
系统管理学报(2018年3期)2018-08-13 01:05:42
中国核电(2017年2期)2017-08-11 08:00:56
流程工业(2017年4期)2017-06-21 06:29:52
流程工业(2017年4期)2017-06-21 06:29:50
石油化工建设(2015年2期)2015-12-01 04:16:44
中国教育技术装备(2015年10期)2015-03-01 02:41:05
